
基于AVL-CRUISE 软件的巴哈赛车动力传动系统匹配仿真
2020-07-08 06:04安徽万通高级技工学校廖光宙衣天培
汽车维护与修理 2020年12期
安徽万通高级技工学校 廖光宙,衣天培
中国汽车工程学会在2015年将Baja(巴哈)赛事引入中国,为赛事提供统一的动力性能基础,所有参赛车均必须使用相同的发动机:一台四冲程、风冷、排量为305 mL的百力通Baja发动机。由于动力系统的限制性,为了提高赛车的竞技性,赛车设计必须追求较大的比功率。对于Baja赛车来说,在发动机相同的情况下,对于动力与传动系统各部件之间的匹配调校显得尤为重要,良好的动力匹配可以让赛车适应不同的工况及赛事,保证赛车良好的动力性。传统的动力传动系统匹配调试时间较长,设计周期长,试验研究成本高,为加快赛车研发速度,减少赛车研发时间,需要利用软件建立赛车整车仿真模型,并对赛车动力与传动系统进行循环工况、最大爬坡度、全负荷加速性、制动性及最大牵引力等进行仿真计算,可以节省大量的调试时间。
AVL-CRUISE是奥地利AVL公司开发的车辆性能仿真分析软件,与ADVISOR及GT-power等动力学仿真软件相比,AVL-CRUISE可预先根据设定的动力性指标,进行动力参数匹配计算和动力总成匹配计算。万通汽车教育参加了2017中国汽车工程学会巴哈大赛,取得了年度总成绩一等奖,襄阳站总成绩一等奖、4 h耐力赛第一名、单圈计时赛第三名,乌兰察布站单圈计时第二名、爬坡第二名的优异成绩。本文根据万通汽车教育2017年 Baja越野赛车整车参数和性能指标对2018年万通Baja越野赛车的发动机、变速比及减速比进行动力匹配设计,利用AVL-CRUISE仿真分析软件,建立赛车整车模型,针对不同工况,对其动力性和经济型进行模拟分析。再通过赛车整车耐久性、直线加速性、爬坡性等多项实车试验,与AVL-CRUISE软件仿真结果进行对比,验证了基于AVL-CRUISE软件的Baja越野赛车动力传动系统匹配仿真及整车建模的准确性,以期对后续其他职业院校参加中国大学生Baja大赛赛车设计有所借鉴。
1 Baja越野赛车的组成和性能指标
Baja越野赛车整车主要由动力传动、车身、车架、悬架、转向、人机、制动、电器等8大系统组成。其中,动力传动系统作为赛车中占比最重的一个组成部分,其主要包含发动机、无极变速器(CVT)、二级减速器、传动轴、万向节等。对于Baja越野赛车来说,其重要的动力性评价指标为最高车速、30 m直线加速和爬坡能力。
2 基于AVL-CRUISE软件的2018万通Baja赛车整车仿真模型的建立
图1为所示为基于AVL-CRUISE软件建立的Baja越野赛车CVT变速器整车系统模型,其整体建模模块主要包括整车、轮胎、制动、百力通Baja发动机、座舱、无级变速器、主减速器、监视器(monitor)等模块。利用AVL-CRUISE软件成熟的模块,从其元件库中选取各个系统相应的图标,建模时,只要将所需部件从元件库中移动至建模,再利用机械连接线将各个部件连接至一起即可。由于Baja赛车采用发动机后置后驱的方式,故前轴按照制动器→车轮的形式进行连接,后轴按照发动机→CVT变速器→减速器→制动器→车轮的顺序进行连接。模型建立后,点击各个部件,对每个部件进行参数输入,并建立驾驶者模块对整车进行控制,辅以Monitor对整车实时工况进行监测,即可建立一个完整的Baja赛车整车模型。
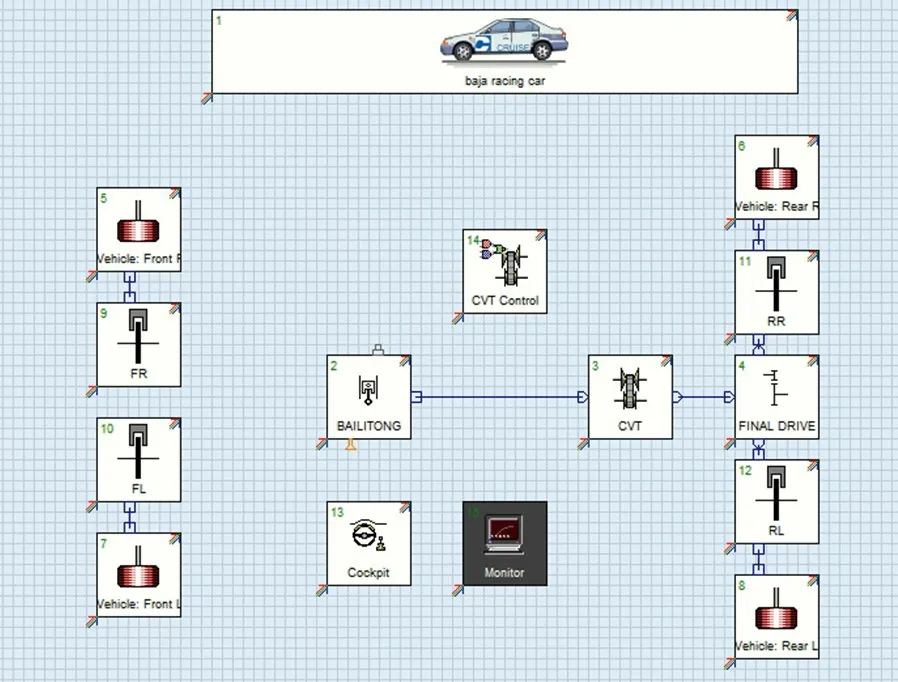
图1 基于AVL-CRUISE软件的Baja赛车模型(截屏)
2.1 整车参数模块
整车参数模块是整车模型中的基本组件,包含了车辆基本尺寸、质量等参数。通过此模块可以计算得到车轮动态载荷、空气阻力、滚动阻力、坡度阻力、加速阻力及车辆总阻力。在该模块中,需要输入的主要参数包括燃油箱体积、重心高度、前后轮胎胎压、整备质量、满载质量、迎风面积、空气阻力系数及前后轴升力系数等。2018年万通Baja赛车整车参数见表1所列,其整车3D模型如图2所示。
2.2 制动器(Brake)模块
2018年万通Baja赛车前后轮制动卡钳均采用Wilwood PS1对置双活塞卡钳,体积小、质量轻,布置更为紧凑。驾驶者在惊慌状态下脚掌发出的制动踩踏力约为2 500 N,利用CAE仿真分析对制动踏板进行优化设计,将制动踏板的材料从45钢优化为7075铝,达到了轻量化目标;制动踏板的杠杆比优化为5∶1,可提升车手驾驶的舒适性和制动控制的灵敏度。由于2018年万通Baja赛车前后轮制动布置形式及所用制动主
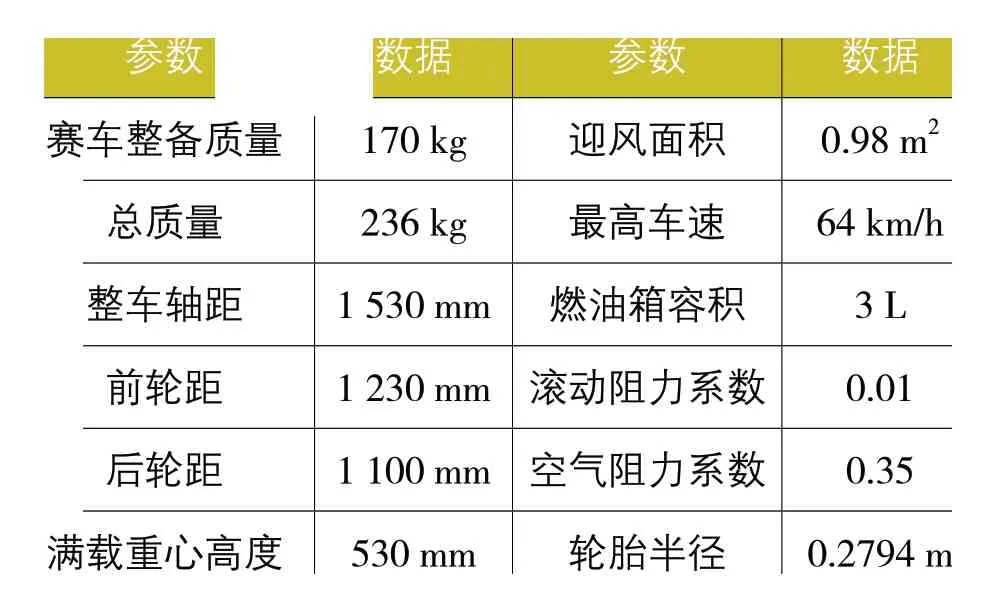
表1 2018年万通Baja赛车整车参数
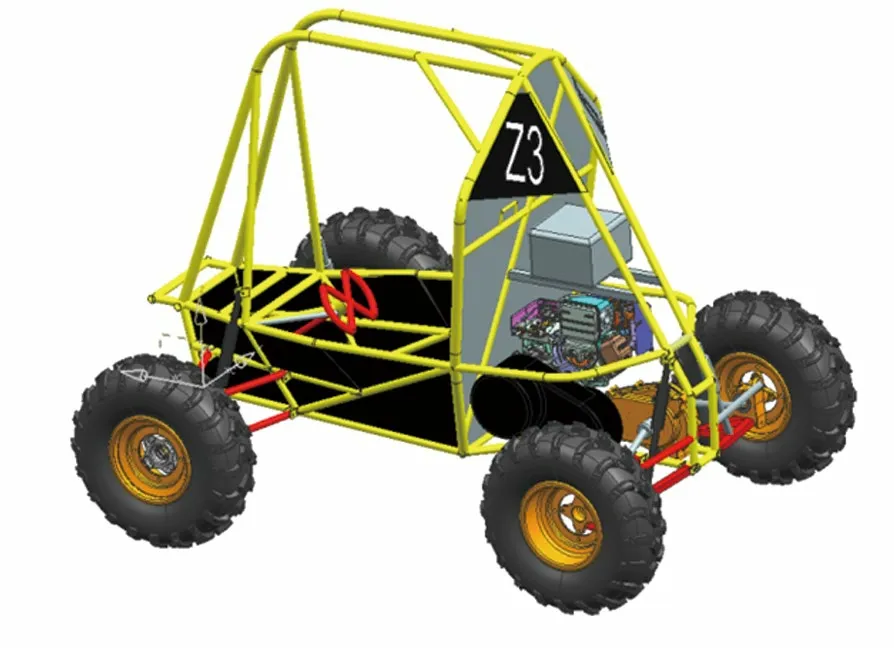
图2 2018年万通Baja整车的3D模型
缸型号均一致,故将FR(前右)、FL(前左)、RR(后右)、RL(后左)的参数均设为一致。
2.3 发动机(Engine)模块
根据赛制要求,所有赛车用发动机均为由百力通统一提供的化油器式单缸发动机,排量为305 mL,最大功率为10 hp(1 hp=0.745 699 872 kW),最大转矩为17 N·m,并据此绘制的发动机外特性曲线。在发动机(Engine)模块中需要输入发动机排量、气缸数、冲程数、发动机怠速转速与最高转速、发动机转动惯量、发动机响应时间、燃油热值及燃油密度等,结合发动机外特性曲线,根据驱动力-行驶阻力平衡图计算得到的赛车最高车速为58 km/h,主减速比为13.25。
2.4 驾驶者-驾驶室(Cockpit)模块
Cockpit模块用来模拟驾驶者和赛车的联系,通过数据总线与车辆进行信息交换,例如车速、加速度行驶距离、发动机油门开度等数据通过数据总线传递给驾驶室,驾驶者根据这些信号结合道路状况调节油门和踏板位置;同样,驾驶者的信息也可以通过数据总线传递给各个模块。Cockpit模块需要定义一些信息模拟真实的驾驶室,如换挡模式、最大制动力、变速器挡位数、加速踏板特性曲线、制动器踏板特性曲线等。
2.5 CVT模块
考虑到赛车手在越野路面上行驶时车辆的颠簸对换挡、制动、加速、离合及转向等的操纵难度,2018年万通Baja赛车使用了功率损失较小的 CVT变速器,以降低驾驶者的驾驶负担,提高驾驶注意力。根据测试,CVT变速器的最小传动比为0.5∶1,最大传动比为3.0∶1。
2.6 车轮/轮胎(Wheel/Tire)模块
Wheel/Tire模块是车辆和道路之间的连接模块。2018年万通Baja赛车选用了抗穿刺性高且能承载更高负荷的正新AT22×7-10TL轮胎。为减小前轮转向力矩,提升后轮抓地力,前后轮选用不同花纹的轮胎。前轮选用“米”字形胎面花纹,能使整车在颠簸路况下依然具有卓越的操控性能;后轮选用“人”字形胎面花纹,使赛车即使是在泥泞路况中行驶也不会有过多的淤泥堆积,从而保证了良好的抓地力。特别需要注意的是在进行车轮/轮胎模块设计时要充分考虑到轮胎的滑移。
2.7 整车信号连接
在建立完Baja赛车仿真模型后,需要对其进行电气连接、信号连接、机械连接。
3 仿真结果
根据Baja大赛的规则,动态赛事主要分直线、操控、牵引、爬坡及耐久等赛项。根据这些赛项的要求,利用AVL-CRUISE软件对2018万通Baja赛车进行了整车动力性、经济性及最高车速、最大爬坡度、最大牵引力等针对UDC工况(Urban Driving Cycle,城市循环工况)进行仿真,利用Monitor模块对赛车仿真过程中的车速、加速度、发动机机转速、车辆行驶距离等进行实时监测(图3)。虽然这个模拟结果与实际赛道测试仍有一点点差别,但在整车设计刚开始时依然具有重要的参考意义。
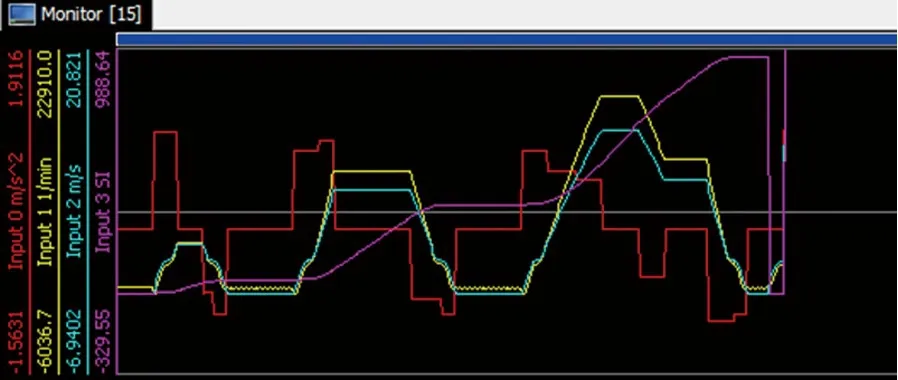
图3 Monitor实时监测结果(截屏)
2018年万通Baja赛车整车模型UDC工况下的车速和加速度的仿真结果显示其最大加速度可达10.29 m/s2左右,最大车速可到达50 km/h,符合设计理念,并且与后期实车测试结果相差不大。利用已配置的参数,建立仿真任务计算赛车的最大牵引力,由于采用CVT变速器,无需考虑到手动换挡,故将发动机转速提升到2 800 r/min。由发动机外特性曲线可知,发动机转速在2 800 r/min时转矩最大,可达到17.5 N·m,减速器的减速比为13.25,无级变速比为0.5~3,轮胎半径为0.279 4 m,通过计算可知,赛车在理想状况下的最大牵引力为2 500 N。由仿真结果可知,赛车在拖动牵引车的情况下,车速为7.8 km/h时的最大牵引力可达2 700 N,与实车测试和理论计算非常接近。
在计算项目中新添计算“最高车速”的任务,其仿真工况为热启动,在无牵引车的情况下,赛车的理论最高车速为60.07 km/h,真实可获得最高车速为56.1 km/h,发动机转速接近3 800 r/min,与实车测试的58 km/h结果十分接近。
利用已配置好的参数,对赛车进行最高爬坡度仿真任务计算。在不考虑起步原地打滑的情况下,对车辆进行仿真模拟,其仿真工况为泥泞道路上,迎风面积为1.2 m2,由于车速过低,并不考虑加速阻力,空气阻力系数为0.305,由于是CVT变速器,无需考虑换挡问题,计算得到的最大爬坡度为47.5°。
4 结论
(1)在赛车设计过程中,灵活运用AVL-CRUISE软件对2018年万通Baja赛车进行整车动力学计算,其仿真模型不仅具有方便、简单、易调试、程序运行可靠等特点,仿真结果相对于ADVISOR等软件来说准确性更高,通过后期实车测试,其实际结果与仿真计算结果十分接近。
(2)对于大学生赛车平台来说,通过建立系统的数学模型和仿真模型并对其实际工作状况进行仿真分析,能够很好地预测各种条件下的赛车性能,而且仿真结果简单易懂,便于学生在设计过程中分析研究。
(3)利用AVL-CRUISE软件不但可以事先灵活地调整设计方案,合理优化参数,而且可以降低研发费用,缩短开发周期,并且在日后的工作中,可灵活运用所学的AVL-CRUISE软件仿真知识,给车辆研究工作带来帮助。
猜你喜欢
时代汽车(2022年17期)2022-09-06
科学大观园(2021年12期)2021-06-28
高中生·青春励志(2018年7期)2018-07-18
汽车杂志(2018年6期)2018-06-25
作文周刊·小学一年级版(2017年27期)2017-08-10
中国房地产·市场版(2016年9期)2016-11-10
户外探险(2016年11期)2016-11-09
计算机辅助工程(2016年3期)2016-08-01
