周视扫描成像系统的转台转速高精度控制
2020-07-07 02:53:28吴少博苏秀琴王凯迪
光学精密工程 2020年6期
吴少博,苏秀琴,王凯迪
(1. 中国科学院 西安光学精密机械研究所,陕西 西安 710119;2. 中国科学院大学,北京 100049)
1 引 言
随着图像传感器和数字图像处理技术的发展,高分辨力、大视场的成像需求越来越多,全景成像技术应运而生。作为全景成像一种主要的手段,周视成像[1-2]以匀速旋转的扫描转台带动成像设备转动实现360°全景成像,广泛用于搜索监视任务。包含快速反射镜的像移补偿型周视扫描成像系统[2]能够实现相机曝光时间内的无像移稳定成像,但对转台的转速精度及鲁棒性提出了更高的要求。
为获得清晰稳定的周视图像,转台在载荷变化或者转矩扰动时要具有高精度的转速。作为一种具有高转矩电流比、高功率效率比、高功率体积/质量比、损耗小的电机,永磁同步电机是驱动高精度速率转台的一种优选方案。 成像设备及转台自身质量分布的不确定性,最终反映在永磁同步电机系统的转动惯量和系统阻尼参数的变化上。快速反射镜的往复运动及转台内部线绕(电源线及传感器数据线)随转台旋转产生了快速变化的转矩扰动。因此,控制器要具有快速响应快变扰动的能力和对系统机械参数的鲁棒性。
近年来,国内外永磁同步电机转速控制技术的发展很快,研究者们提出了各种各样的控制方法,例如反步控制[3-4]、预测控制[5-6]、模糊控制[7]滑模控制[8-9]、学习控制[10-11]、自适应控制[12-13]以及基于观测器的复合控制[14-15]等。这些方法基本都是以转速闭环和电流闭环串级控制为主的双采样率控制系统,转速闭环的采样率始终小于电流闭环以确保系统稳定性。因此,在最高采样率受控制器的限制下,转速环控制算法的控制效果难以达到最优。近年来,滑模控制由于具有很强的抗干扰性能和鲁棒性能,而成为研究重点[8-9,13-17]。但滑模本身具有抖振的缺点,常常需要配合扰动观测器以减小抖振对系统稳定性和稳态精度的损害。现有的基于观测器的滑模控制在对于转矩引起的系统扰动建模时多考虑常数或缓变转矩[12,14-15],少有考虑转矩扰动快速变化的情况,对于类似于像移补偿周视成像这种转矩快变且无法预知的系统,则不能获得高精度转速跟踪。此外,这些基于观测器的滑模控制对于转矩扰动和参数不确定性的整体建模中包含了q轴电压的导数,总扰动上界难以确定[14-16],进而使得控制参数选取困难,观测器的优势不能得到充分发挥。
鉴于以上问题,本文提出了一种建立在单采样率闭环控制模型下的复合控制策略,并相应给出了只与转速的高阶导数有关、且包含机械参数变化和快变转矩扰动的复合扰动变量。然后,提出了一种基于快速非奇异终端滑模[18-19]和扩张高增益观测器[20-22]的复合控制算法,实现了永磁同步电机驱动的像移补偿型周视扫描成像系统的转台转速高精度鲁棒控制。实验表明,相比于传统的双采样率PI 控制及单一采用快速非奇异终端滑模的控制,本算法具有明显的抗干扰和鲁棒特性,能实现机械参数不定和转矩快变下的高精度转速跟踪,并获得了清晰稳定的周视成像。
2 单采样率控制系统的数学模型
2.1 像移补偿型周视扫描成像系统工作原理及其转台转速控制需求分析
如图1所示,像移补偿型周视扫描成像系统由转台及固定在台面上的相机、快速反射镜、图像处理电路等装置组成(实物参见图3)。该扫描系统在水平静止基座上运行,可对水平方向360°范围的空间进行实时扫描成像。系统工作时,永磁同步电机驱动转台及固定在台面上的装置以某一设定转速水平连续旋转,相机按一定的帧频曝光成像,快速反射镜相对台面以相同频率在限定的角度内进行水平方向的往复摆动。由于限位且成像帧频较高,快速反射镜的运动轨迹在大部分时间为非线性的,但要求它在每个成像周期的曝光时间内相对于转台反方向匀速摆动(将每个成像周期中的这段运动轨迹称为快速反射镜匀速段),使经过快速反射镜进入相机镜头的光线所对应的视场在每个成像周期的曝光时间内保持稳定,从而消除相机随转台旋转产生的像移,实现稳定清晰的周视成像。由光学原理不难看出,曝光时间内快速反射镜的反向摆速为转台转速的1/2时,可完全消除像移。
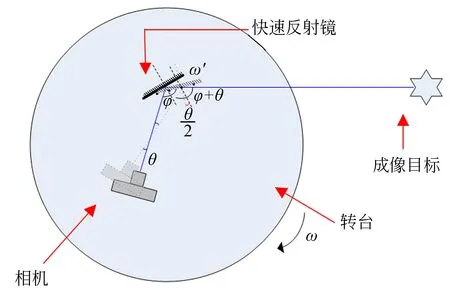
图1 像移补偿型周视扫描成像系统原理Fig.1 Principle diagram of ICSIS
由于快速反射镜固定在转台之上,其摆速是相对转台的速率,因此不受转台转动的影响,且没有参数及负载的变化,在曝光时间内匀速摆动较易实现高精度。而对于转台,由于永磁同步电机本身的非线性、转台上和内部设备的复杂性、反射镜的快速往复摆动及限位,而成为机械参数不确定和快速转矩扰动同时存在的非线性不确定系统,传统控制算法难以实现其转速的高精度控制。因此,转台转速的高精度控制成为实现高精度像移补偿的关键。
在相机曝光时间参数一定时,每个成像周期的曝光时间内转台转速误差与快速反射镜匀速段的摆速误差的绝对值之和决定了进入相机的光线所对应水平视场角度的最大偏移量。成像效果以每帧成像像元数的最大偏移量作为评价标准,在相机单帧水平像元数一定时,最大像移量和最大视场偏移角成正比。一般要求转台转速误差和快速反射镜匀速段的摆速误差在同一级别,否则最大视场偏移量及最大像移量的下限将由两个速率误差较大者决定。本文在研究转台转速精度对成像效果的影响时,快速反射镜匀速段的摆速精度已达到和转台转速精度相当或更高的数量级。因此,最大像移量与转台转速精度的关系为:
(1)

2.2 控制系统模型建立
永磁同步电机驱动的周扫系统的转台在本质上就是一个永磁同步电机伺服传动系统。在建立永磁同步电机传动系统模型时,一般地,应对永磁同步电机做以下3点假设:(1)定子铁心饱和可以忽略;(2)定子反电动势是三相对称正弦的;(3)铁心涡流和磁滞损耗忽略不计。然后,在d-q轴坐标下永磁同步电机传动系统的数学模型可表示为:
(2)
其中:id,iq和ω分别代表永磁同步电机的d-q轴电流和转子机械转速;ud和uq代表d-q轴定子输入电压;J和B分别代表传动系统的转动惯量和摩擦阻尼系数;Tl代表传动系统的负载转矩;Rs代表定子电阻;Ld和Lq为d-q轴等效电感;φf代表转子永磁体磁链;np代表电机的极对数。
相比于内置式,表贴式永磁同步电机具有较小的磁链谐波且永磁体的用量较小,更容易实现高精度的转速控制且更易于搭载在对质量比较敏感的平台。因此,本文采用一个表贴式永磁同步电机作为转台的驱动,即满足Ld=Lq=L,则公式(2)中的运动方程可简化为:
(3)
(4)
如前所述,转台自身及其上的装置较多,其质量分布随工况而变,从而导致传动系统的转动惯量及摩擦阻尼的不确定性。这种参数不确定性通常是简单的常数变化。另外,成像系统在工作时,转台内部绕线随转台旋转产生小幅的不确定转矩扰动,同时转台上的像移补偿装置快速往复运动,对传动轴形成了主要的转矩扰动,这种扰动由于往复运动的快速性和非线性段的存在而成为快速变化且不确定的扰动。但由于像移补偿装置惯量较小,转矩扰动及其导数都是有界的。考虑转动惯量和摩擦阻尼随传动系统质量分布的变化,且转矩扰动快变的综合工况,定义电机本身的转动惯量和摩擦阻尼为Jn和Bn,则有:
(5)

(6)
(7)
其中:

(8)
(9)
bd=-Rsid/L+npiqx1,
(10)
(11)
(12)
不难看出,不同于传统的双采样率转速控制系统,上述控制系统模型是由d-q轴电压作为控制输入直接控制转速,因此转速控制系统只需要一个采样率。d是包含了机械参数(J和B)变化及转矩扰动的系统总扰动,除此之外,d中只含有转速变量的高阶导数。对于一个稳定的转速控制系统,转速的高阶导数显然有界,因此可认为总扰动d也是有界的,即 |d|
3 控制器设计

3.1 转速跟踪控制器
sig(x)a=|x|asgn(x).
(13)
定义滑模面变量:
(14)
其中:λ>0,1<γ<2。据文献[18],输入uq的快速非奇异终端滑模(Fast Nonsingular Terminal Sliding Mode,FNTSM)控制设计为:
k11s1+k12sig(s1)ρ],
(15)
其中:0<ρ<1,k11>0,k12>0。FNTSM控制式(15)中只有非线性项bq的补偿,没有关于扰动项d的任何补偿。根据文献[18]中的定理1,有如下推论:

|s1|≤Ω1=Φ=min(Φ1,Φ2),
(16)
(17)
(18)
根据公式(12)和推论1,如果转矩扰动慢变,即Tc较小,选择较大的k11和k12,可以使系统稳定后,D较小,进而得到较小的转速跟踪误差。当转矩快变时,Tc和D较大且不随转速稳定而衰减,此时FNTSM 控制下的转速跟踪误差会较大。为此,本文提出了高增益扩张观测器(Extended High-Gain Obsever,EHGO)和FNTSM相结合的复合控制策略来解决快变转矩存在时的转速跟踪问题。
(19)

(20)
(21)
当观测器的初始值与观测对象的初始值不同且ε很小时,观测器将出现峰值。文献[20]中,选择ε为时间的函数以减小滑模控制器下的高增益观测器的峰值,但是本文所述的系统扰动d由于快变转矩的存在不随时间而衰减,因此较大的观测误差可能出现在整个控制过程中。为避免整个控制过程的观测器峰值,本文的ε设计为观测误差的函数:
(22)

基于扩张高增益观测器的快速非奇异终端滑模控制设计为:
(23)
其中:
(24)
(25)
其中:
(26)
(27)
(28)
(29)
定义EHGO观测误差为:
χ=[χ1,χ2,χ3]T=
(30)
定理1:在已知id受ud稳定控制的前提下,系统(6)在式(19)~式(24)给出的uq的控制下,有如下结论:
(2)当ε→0时,T(ε)→0, Ωi(ε)(i=1,2,3)→0。
3.2 d轴电流跟踪控制器
设计滑模面变量:
(31)
d轴电压由FNTSM控制给出:
ud=L(-bd+k21sig(s2)m+k22sig(s2)n),
(32)
其中:k21>0,k22>0,0
-s2(k21sig(s2)m-k22sig(s2)n)=
(33)
当且仅当s2=0时取等号,即s2=0是系统的渐近稳定点。由文献[22]的引理2可知,从任意s2(0)≠0 到s2=0的到达时间为:
(34)
显然,在有限时间ts2,任意id(0)≠0可到达id=0,即id的稳定性得到保证。
综上所述,在3.1中的转速跟踪控制器和3.2中的d轴电流跟踪器的控制下,能够直接得到永磁同步电机系统的输入电压,不需要串级双采样率控制。通过合理选择控制参数,能实现有限时间内最大转矩电流比下的高精度转速跟踪,并对机械参数和快变的转矩扰动具有鲁棒性。
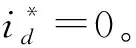
永磁同步电机驱动的转台转速控制系统控制框图如图2所示。
图2 永磁同步电机控制系统框图Fig.2 Block diagram of control system for permanent magnet synchronous motor
4 仿真与实验结果
为了证明本文提出的FNTSM+EHGO的复合控制策略的有效性,对传统PI控制、FNTSM控制、线性滑模SMC+观测器EHGO和FNTSM+EHGO控制四种算法的控制性能进行了仿真和实验对比。为了突出算法的可比性,传统PI控制仍延用已广泛使用的双采样率控制模型,其余3种滑模相关的算法均采用双采样率控制模型,且4种方法的d轴电流控制器均采用最大转矩电流比的方法。针对上述d轴电流控制器,除PI算法采用PI控制器,本文所述FNTSM和FNTSM+EHGO算法均采用3.2中的FNTSM控制器。
因为d轴电流控制模型中只有一阶变量id,SMC+EHGO控制算法的d轴电流控制器仍采用公式(31)所示的滑模面,其控制输入ud由下式给出:
(35)
SMC+EGHO的转速跟踪器由线性滑模面和下述控制输入给出:
s3=x1+cx2,
(36)
(37)
本文选取的对比算法SMC+EGHO的转速跟踪器和电流跟踪器的控制输入均基于指数趋近率,是因为指数趋近率下滑模收敛速率和抖振水平相对均衡。
仿真平台在Simulink中搭建,其中永磁同步电机及逆变器选择连续系统建模,控制器及SVPWM均采用离散系统建模。实验平台如图3所示,控制板主处理器为TMS320F28335,其最高频率为150 MHz。驱动板选用IPM驱动的IGBT逆变系统,母线电压Udc=48 V。转速传感器选用32 bit 雷尼绍绝对式光栅传感器。仿真和实验中单采样率算法的采样率均为10 kHz,双采样率PI控制的电流内环采样率均为10 kHz,转速外环采样率均为1 kHz,SVPWM的计算频率均为20 kHz。
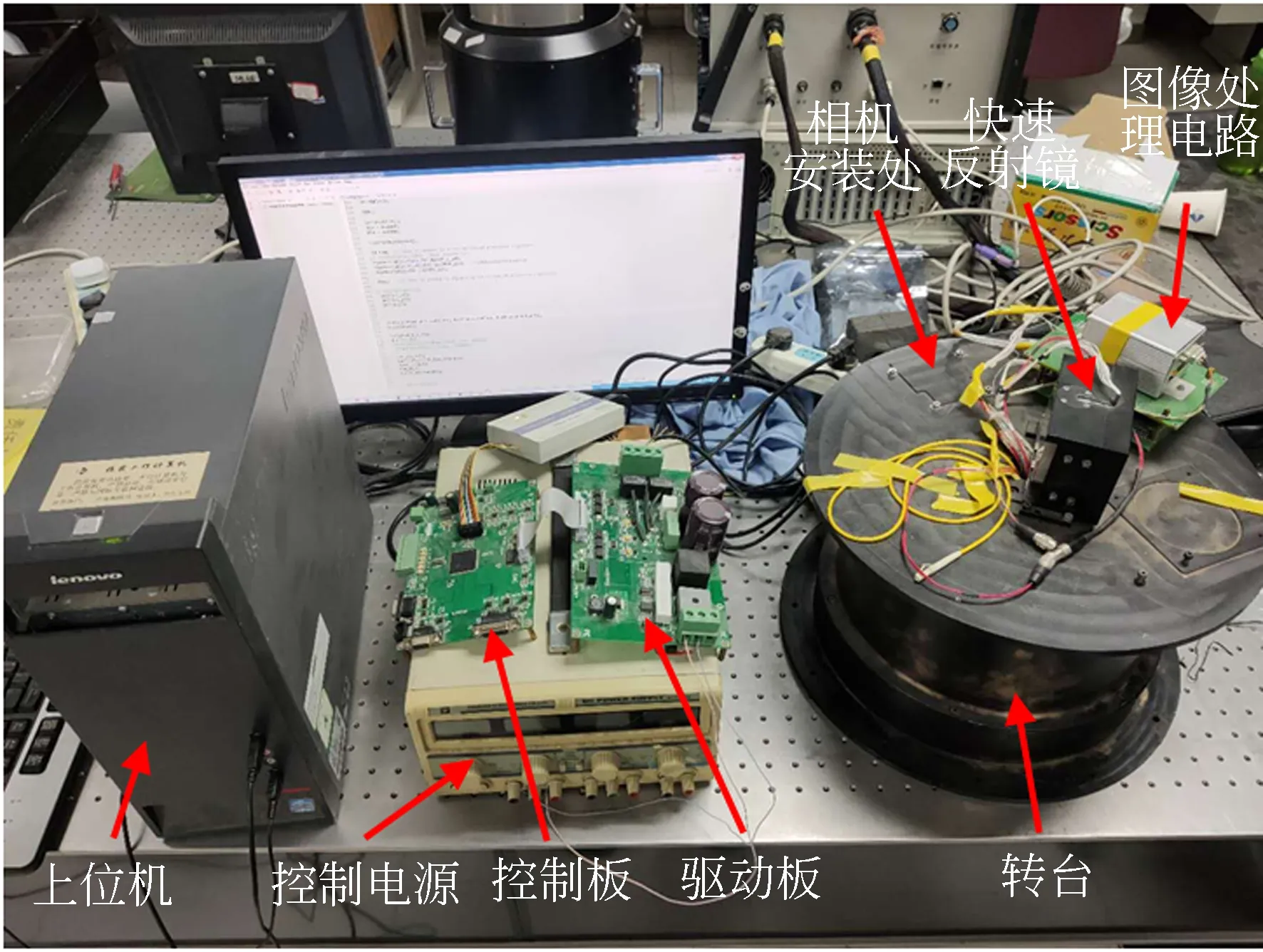
图3 像移补偿型周视扫描成像系统控制实验装置Fig.3 Experimental control setup for ICSIS

表1 永磁同步电机参数
Tab.1 Parameters of permanent magnet synchronous motor
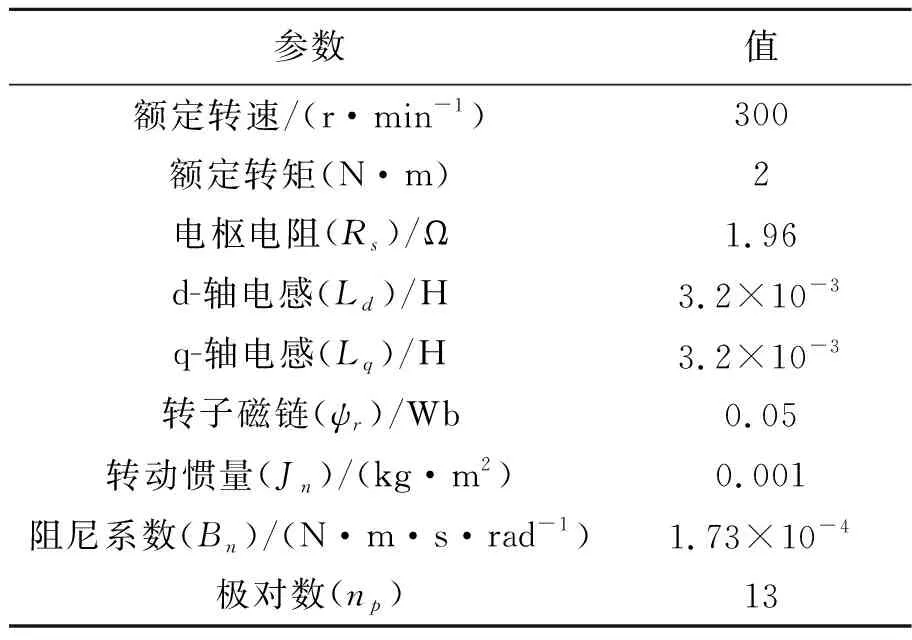
参数值额定转速/(r·min-1)300额定转矩(N·m)2电枢电阻(Rs)/Ω1.96d-轴电感(Ld)/H3.2×10-3q-轴电感(Lq)/H3.2×10-3转子磁链(ψr)/Wb0.05转动惯量(Jn)/(kg·m2)0.001阻尼系数(Bn)/(N·m·s·rad-1)1.73×10-4极对数(np)13
4.1 仿真结果
仿真中转台转速参考值设定为ω*=200 r/min。图4为t=1 s时,转矩从0突增到2 N·m时的转速响应结果,滑模相关算法的阶跃响应和对抗突变扰动的能力明显优于PI控制。相对于FNTSM和SMC+EHGO,由于FNTSM算法收敛的快速性和EHGO的扰动补偿作用,FNTSM+EHGO算法的阶跃响应最快,且稳定无超调,突变扰动下的暂态转速偏离值最小,恢复到稳态的速度最快。
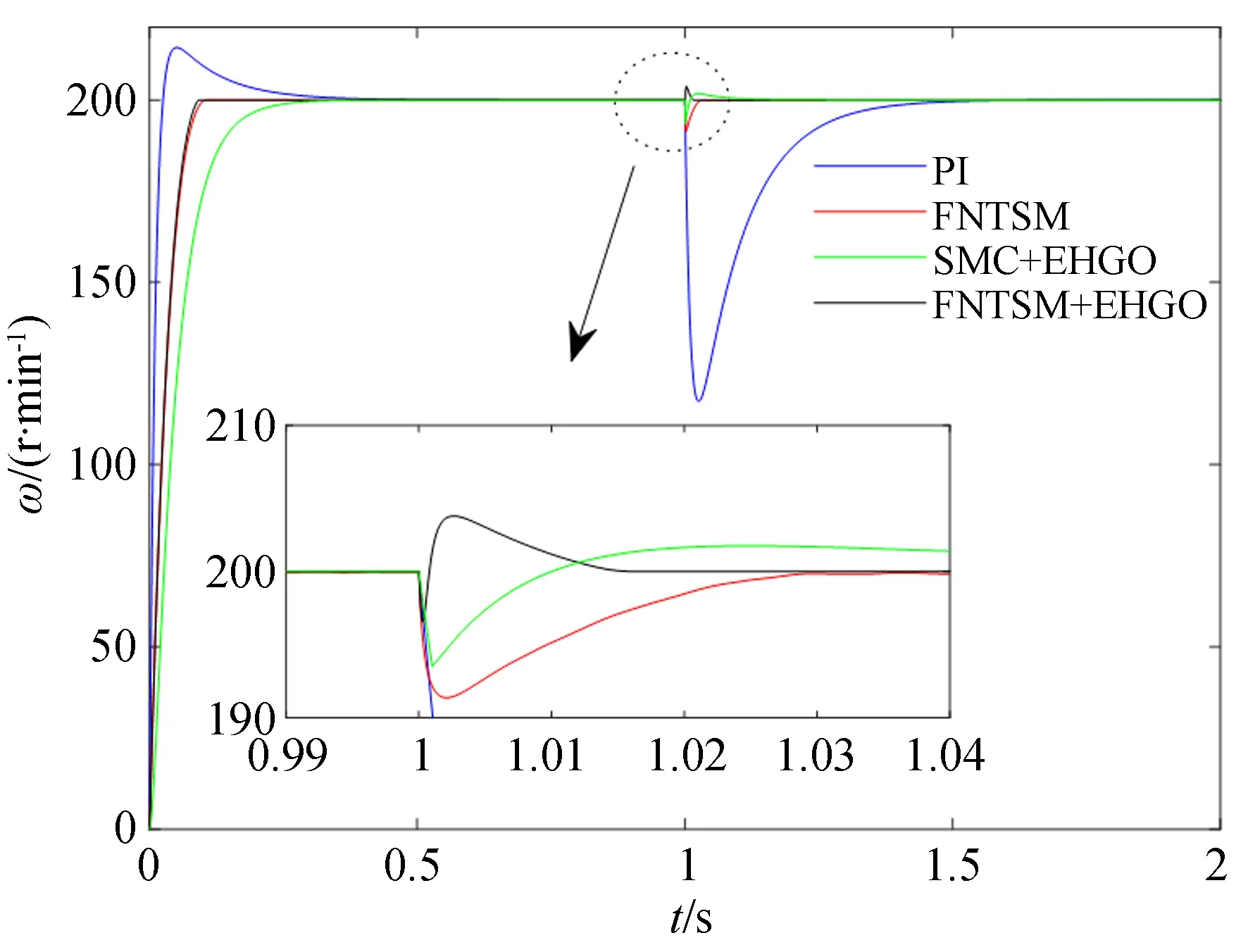
图4 突变转矩扰动下转速响应Fig.4 Speed response under sudden disturbance
图5为在转矩扰动Tl=sin(100t)下的转速响应结果。可以看出,在快速周期性转矩扰动下,FNTSM+EHGO的稳态转速几乎不受所加周期性转矩扰动的影响,而其它3种算法的稳态转速呈现出与转矩扰动的导数同频率的周期性起伏变化,但FNTSM和SMC+EGHO的起伏明显小于PI的。
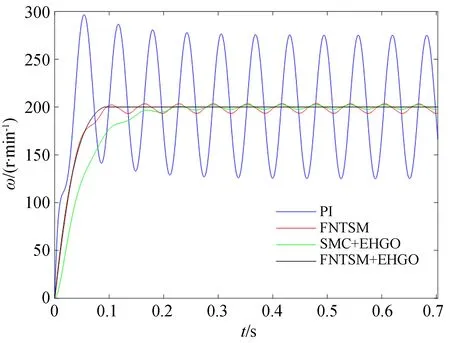
图5 周期性转矩扰动下转速响应Fig.5 Speed response under periodic torque disturbance
图6~图9为J和B从Jn和Bn的1倍增加到4倍时3种控制算法的转速响应变化,并且均在t=1 s时加入2 N·m的突增转矩。可以看出,随着J和B的增加,除FNTSM算法的抗扰能力有所减弱外,其它3种算法的抗扰能力均有所增强,且FNTSM+EHGO的抗扰能力增强得最明显。然而,随着J和B的增加,PI的上升段超调量和调整时间也随之增加,FNTSM的上升时间也有少量增加,而FNTSM+EHGO和SMC+EHGO的上升段几乎不变,这说明通过本文所述观测器EHGO的补偿,复合控制算法表现出对机械参数变化的强鲁棒性。另外,在任何一种机械参数下,FNTSM+EHGO的暂态偏离值在所有算法中最小,且恢复到稳态的时间最短。

图6 参数变化及转矩突增时PI的转速响应Fig.6 Speed response of PI under lumped disturbance
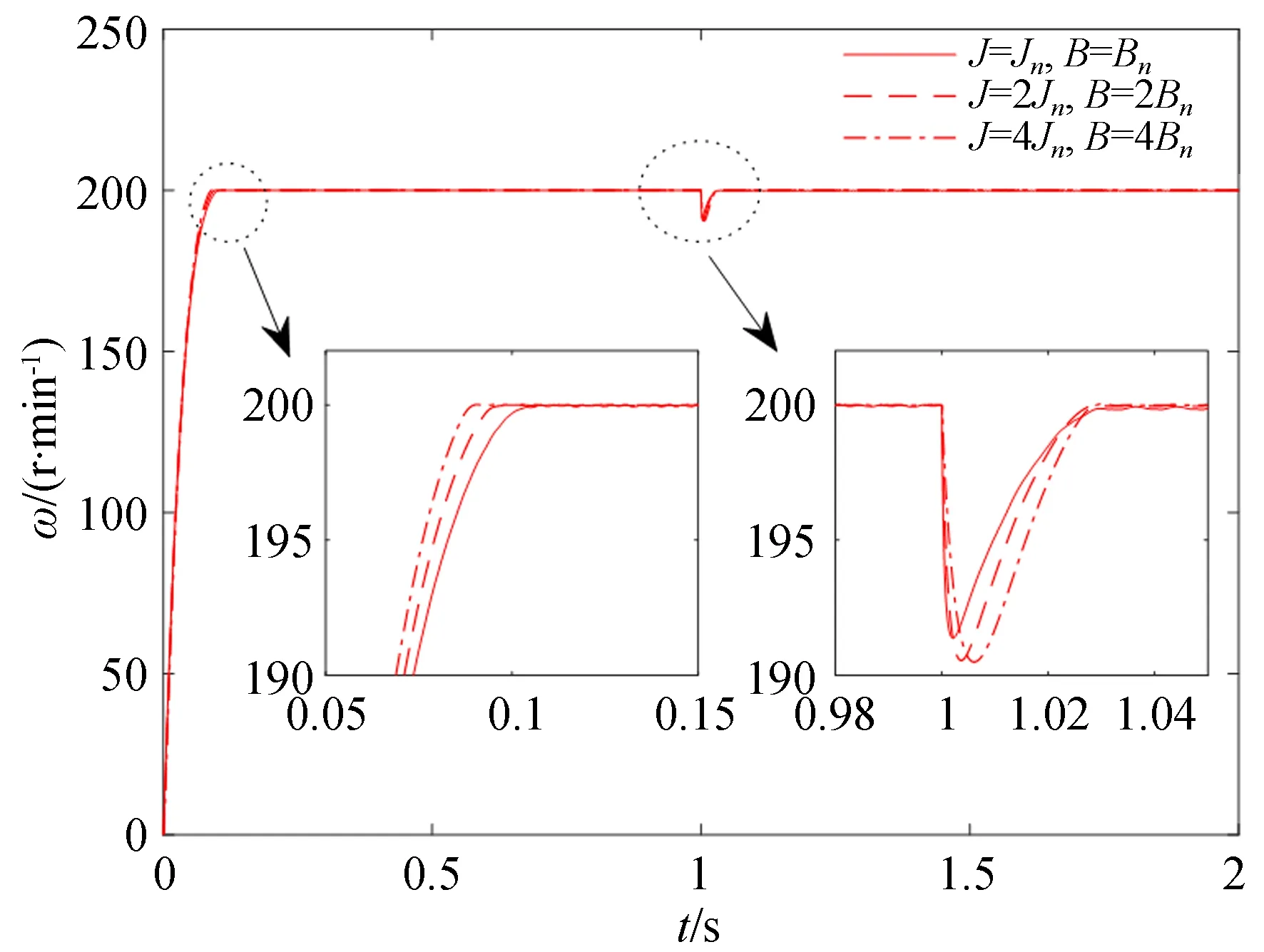
图7 参数变化及转矩突增时FNTSM的转速响应Fig.7 Speed response of FNTSM under lumped disturbance
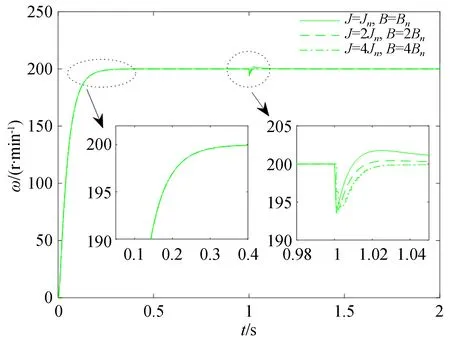
图8 参数变化及转矩突增时SMC+EHGO的转速响应Fig.8 Speed response of SMC+EHGO under lumped disturbance
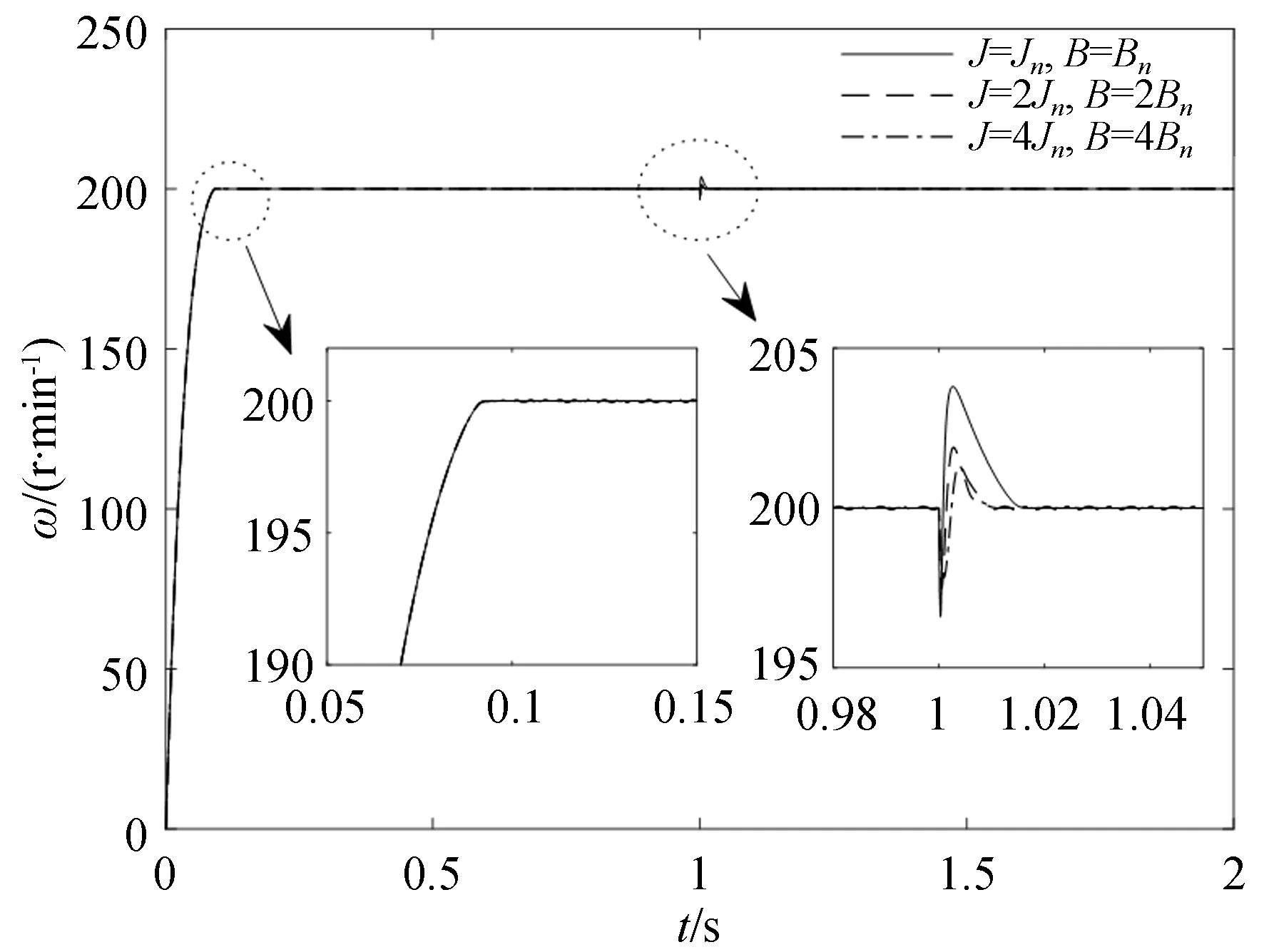
图9 参数变化及转矩突增时FNTSM+EHGO的转速响应Fig.9 Speed response of FNTSM+EHGO under lumped disturbance
4.2 实验结果
实验时,转台上的装置除图3所示之外,搭载了一可见光相机用于成像,相机的帧频为50 frame/s,系统的总转动惯量J和实际运行时的摩擦阻尼B未知,数据通过串口实时传回上位机,回传数据的等效采样率设定为1 kHz。
图10~图11分别为系统转台转速设定为2 r/s(即ω*=120 r/min)、快速反射镜匀速段摆速为1 r/s时的转台转速响应和q轴电压的控制输入响应。图12~图13分别为系统转台转速设定为4 r/s(即ω*=240 r/min)、快速反射镜匀速段摆速为2 r/s时的转台转速响应和q轴电压的控制输入响应。
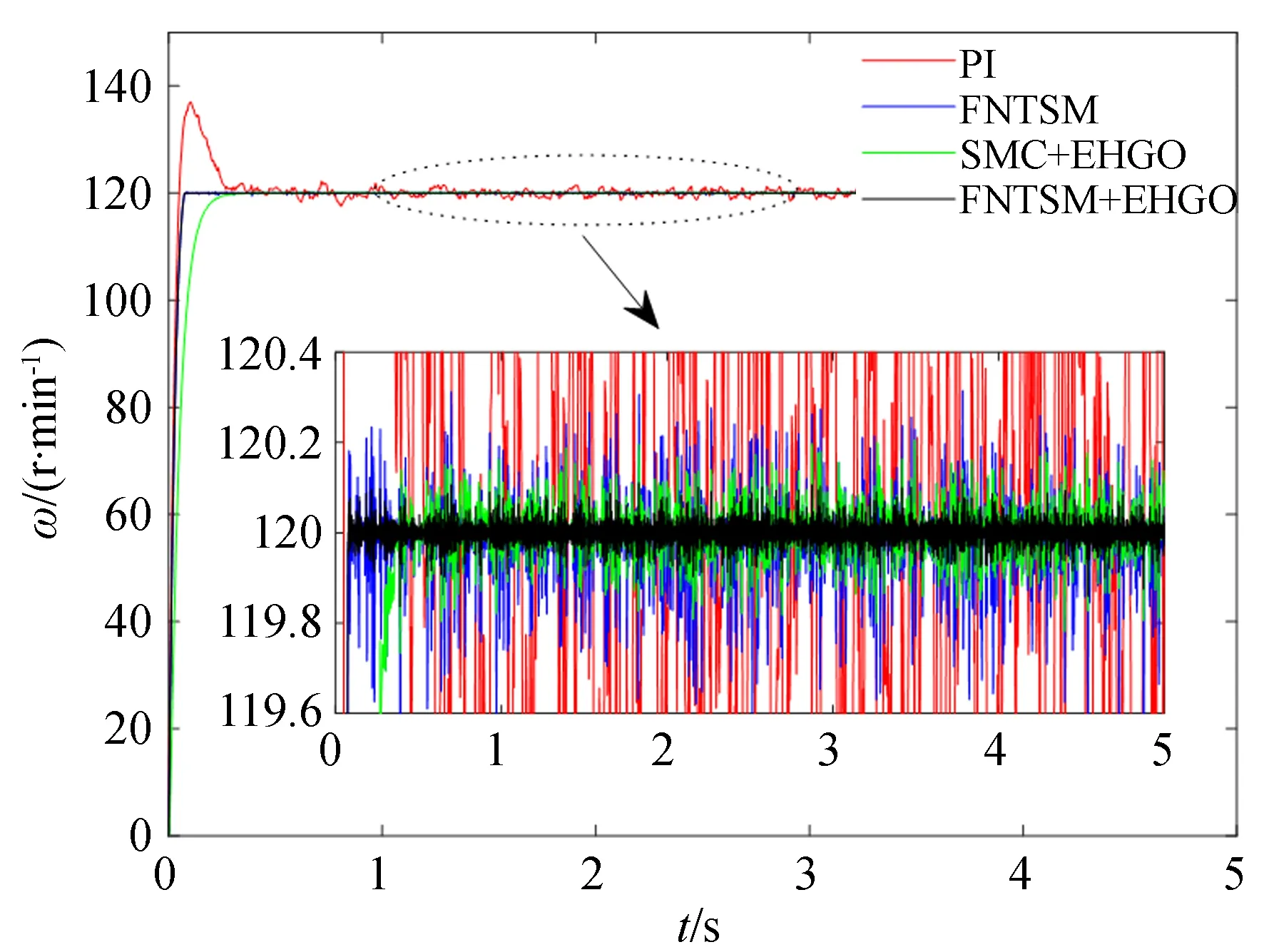
图10 实验平台下ω*=120 r/min时的转速响应Fig.10 Experimental speed response with ω* of 120 r/min

图11 实验平台下ω*=120 r/min时的q轴电压响应Fig.11 Experimental uq response with ω* of 120 r/min

图12 实验平台下ω*=240 r/min时的转速响应Fig.12 Experimental speed response with ω* of 240 r/min
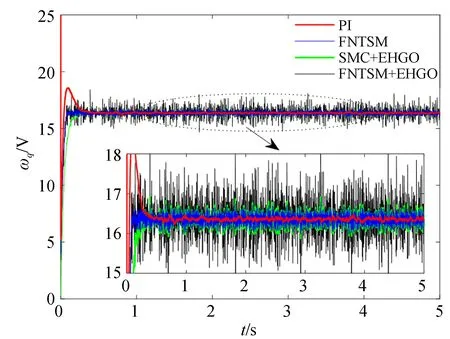
图13 实验平台下ω*=240 r/min时的q轴电压响应Fig.13 Experimental uq response with ω* of 240 r/min
从实验数据可以看出,FNTSM+EHGO控制算法下转台的转速精度最高,在转速要求为120和240 r/min时均达到了0.1%的稳态精度,SMC+EGHO的转速精度次之,约为0.2%,FNTSM的转速精度约为0.3%,PI的转速稳态精度最差,约为1.5%。从q轴输入电压可以看出,得益于FNTSM的快速收敛性和EHGO对系统总扰动的观测,FNTSM+EHGO的uq中包含了最多的扰动补偿量,表现为幅度较大的高频信号,SMC+EGHO 次之,FNTSM的uq包含有幅度较小的高频信号, PI的uq少有高频信号,抗快变扰动的能力最差。
综上所述,FNTSM+EHGO复合控制算法有效利用了FNTSM算法的快速收敛性和EHGO对宽频和宽幅范围内扰动的观测与补偿能力,在永磁同步电机驱动的周扫系统的转台这一实际应用场景中表现出了比传统PI控制,线性滑模+观测器和单独采用FNTSM算法更好的阶跃响应性能和抗扰动性能,使得转台能保持更高精度的转速均匀性,为高质量的周视扫描成像提供了保障。
最后,用FNTSM+EHGO算法对图3所示实际周扫系统的转台进行控制,并对地面附近360°范围内的空间场景进行实景成像。系统搭载的相机参数为单帧水平视场角α=20°、像元数I=2 560、曝光时间te=2 ms,帧频为50 Hz。转台转速设定为2 r/s(对应地,快速反射镜匀速段摆速设定为1 r/s),此时的转台转速精度达到了0.1%。由公式(1)测算,每帧成像的实际最大像移量小于0.5个像元。系统所成单帧图像经图像处理电路拼接后得到图14所示的360°周视全景成像图,图15为其局部放大图。可以看出,360°全景范围内图像清晰稳定,FNTSM+EHGO算法下像移补偿型周视扫描成像系统的转台转速得到了很好地控制。

图14 像移补偿型周视扫描成像系统360°全景成像图Fig.14 Three-hundred and sixty degree panoramic image captured by ICSIS

图15 像移补偿型周视扫描成像系统360°全景成像局部放大图Fig.15 Local magnification image of 360° panoramic image captured by ICSIS
5 结 论
本文根据永磁同步电机驱动的像移补偿型周视扫描成像系统的转台机械参数变化和快速转矩扰动的特点,建立了包含机械参数变化和转矩扰动单采样率不确定性系统模型,提出了一种单采样率下的复合控制算法,并证明了该控制算法的控制性能。仿真和实验数据均表明,本文所提算法在参数鲁棒性和抗扰动能力方面相比于对比算法具有明显的优势。在实验所用周视扫描成像系统平台下,转台转速设定在120 r/min和240 r/min时,转速的稳态精度均可达0.1%,周视成像实景清晰稳定,具有很高的实用价值。
猜你喜欢
新能源科技(2022年9期)2022-11-20 19:28:56
防爆电机(2020年6期)2020-12-14 07:16:54
环境技术(2020年1期)2020-03-06 11:41:02
光学精密工程(2016年6期)2016-11-07 09:07:15
光学精密工程(2016年3期)2016-11-07 09:03:49
光学精密工程(2016年1期)2016-11-07 09:01:50
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
大电机技术(2015年5期)2015-02-27 08:22:28