考虑零序分量的DVR智能补偿策略
2020-07-06 07:04聂晓华胡方亮刘继君
实验室研究与探索 2020年4期
聂晓华,胡方亮,万 良,刘继君
(南昌大学信息工程学院,南昌330031)
0 引 言
电网的电能质量问题主要分为稳态和暂态两方面。目前稳态电能质量问题的解决方案相对成熟,而暂态电能质量问题仍有许多难点有待突破。近年来,随着各种精密仪器、计算机设备的运用,暂态电能质量问题的解决变得更加重要。而动态电压恢复器(DVR)作为解决电压暂降、暂升、闪变等问题的有力措施之一,也受到广泛的关注和研究[1]。
补偿策略是影响DVR补偿效率和补偿质量的关键因素。DVR常用的补偿策略主要有跌落前电压补偿法、同相电压补偿法和最小能量补偿法[2-4]。跌落前电压补偿法的补偿效果最好,当敏感性负荷对电压幅值和波形连续性要求都很高时,其是最佳补偿策略。同相电压补偿的补偿电压幅值最小,即可最大程度利用DVR储存的能量,且易于实现。但这两种方法往往都需要DVR输出较大的有功功率才能实现补偿,这无疑增大了DVR储能装置的成本。最小能量法可以实现DVR输出能量最小,但也存在对DVR储能利用率不高的问题。
文献[5-7]中提出将DVR 3种基本补偿策略相结合的综合补偿策略,通过3种算法的灵活切换提升DVR的补偿性能。文献[8]中提出一种以DVR补偿时间梯度为扰动方向的控制策略,能够获得比最小能量法更长的补偿时间。文献[9]中提出电压下垂补偿策略,补偿电压沿着下垂曲线进行过渡,在负载电压相位跳变允许范围内增加DVR的补偿时间。可以看出,DVR补偿策略的主要目标为保证负载电压幅值稳定,减小相位跳变范围和补偿时间最长。补偿时间主要与DVR直流侧储能利用率和输出有功功率有关。现有策略均未考虑零序分量对补偿效果的影响,文献[3,10]中指出适当注入零序电压可以扩大DVR的补偿范围,即可以进一步提升DVR直流侧储能利用率,但没有给出注入零序电压取值的计算方法。而要获得最大补偿时间则要使DVR输出功率在补偿过程中始终为补偿范围内的最小值,单一的补偿策略无法实现此目标[11]。
本文提出一种基于猫群算法[12]的DVR智能补偿策略。分析了零序分量在三相三线制和三相四线制下对DVR补偿性能的影响,给出考虑零序分量的DVR补偿范围计算方法。以DVR输出功率为目标函数,采用猫群算法在补偿范围内寻优,确保DVR输出功率始终为补偿范围内的最小值。仿真结果表明所提算法能够确定注入零序分量的最佳值,动态跟随补偿范围的变化,使DVR始终工作在有功功率输出最小状态,有效提升DVR的补偿时间。
1 含零序分量的DVR补偿策略分析
1.1 零序电压对DVR补偿性能的影响
为了能够灵活控制零序电压分量,本文采用的DVR系统结构为三单相H桥结构,如图1所示。
DVR主要由储能单元、逆变电路、LC滤波电路和旁路开关组成。其功能是在电网电压发生凹陷时,控制逆变器输出补偿电压以保证敏感性负载侧电压的稳定。由于直流电源的高额成本限制了储能装置的容量,因此在保证负载电压稳定的同时使DVR补偿时间最长是其补偿策略的主要目标。
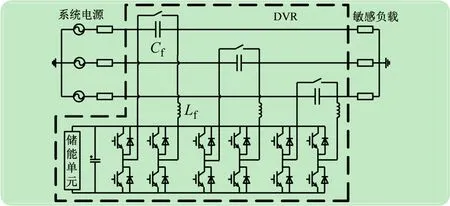
图1 DVR系统结构图
受逆变器调制比影响,补偿电压的幅值决定了直流母线的最低放电电压,其约束关系可由下式表示:

式中:UDC为直流侧放电电压;M为逆变器最大调制比;UDVR为三相补偿电压幅值中的最大值,其大小决定了直流侧可以释放的总能量,而DVR输出的有功功率决定了能量释放的速度。因此补偿时间的长短由补偿电压幅值和输出有功功率共同决定。零序电压对DVR补偿性能影响的问题也可以转化为其对补偿电压幅值和输出有功功率影响的问题。
补偿电压的取值主要由电网电压的故障程度和参考电压的幅值、相位和中点共同决定。一般情况下,都希望负载电压的幅值不受系统故障的影响,所以参考电压的幅值是确定的,只能通过改变参考电压的相位和中点来改变补偿电压。图2为改变参考电压相位和中点的补偿示意图。其中OA、OB、OC为实时检测到的电网故障电压,OA1、OB1、OC1为改变前的参考电压,OA2、OB2、OC2为改变后的参考电压,在图2(b)中其由零序分量OO′和正序分量O′A2、O′B2、O′C2组成,AA1、BB1、CC1为改变前的补偿电压,AA2、BB2、CC2为改变后的补偿电压。
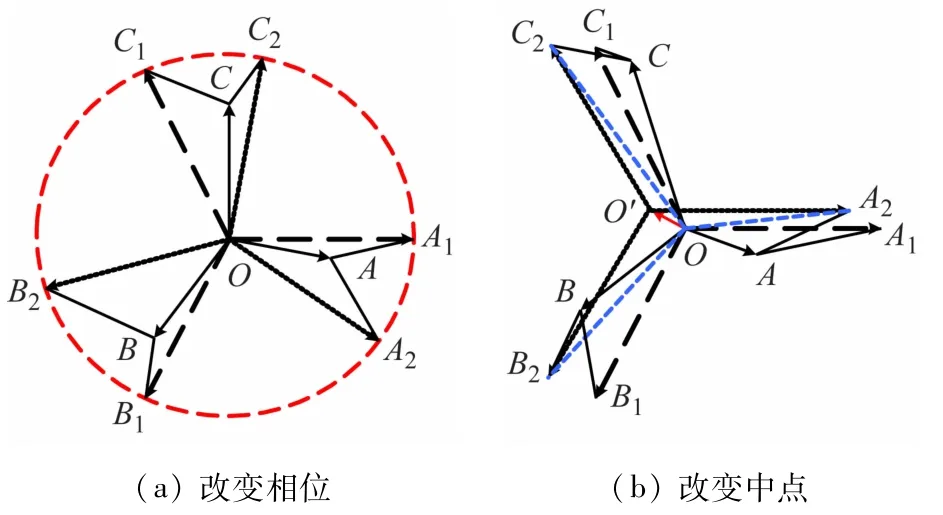
图2 补偿示意图
由图2(a)可以看出,改变参考电压的相位可以改变补偿电压的幅值,但其主要目的在于优化DVR输出的有功功率。
电网系统的接线形式以三相三线制和三相四线制为主。三相三线制的中点不固定,而部分三相四线制系统也允许一定量的零序分量存在[10]。由图2(b)可以看出,改变参考电压的中点(即注入零序分量)也可以改变补偿电压的幅值。对于三相三线制系统,由于不存在零序电流,所以零序分量的注入并不会影响系统中有功功率的分配。而三相四线制系统有3倍的零序电流流过中线,会对系统有功功率的分配产生影响。
如图3所示为三相四线制系统零序分量示意图,其中US0为电网故障电压的零序分量幅值;UDVR0为DVR输出的零序补偿电压幅值;UL0为负载零序电压幅值;I0为零序电流幅值;θL为负载阻抗角,则此时DVR的零序功率可表示为

可知,在三相四线制下零序电压的允许范围内,可以通过调节DVR输出的零序补偿电压改变DVR输出的总功率。
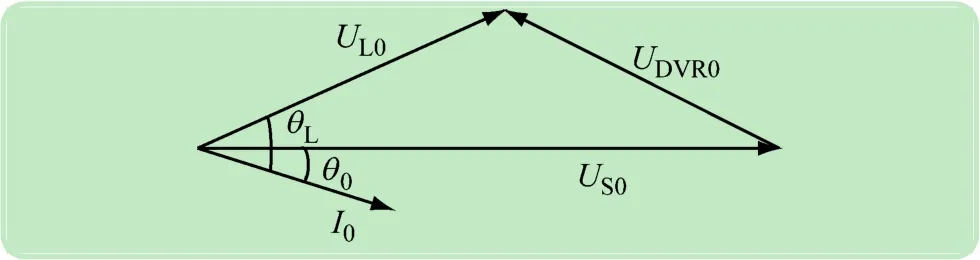
图3 三相四线制系统零序分量示意图
1.2 考虑零序电压的DVR补偿范围计算
定义DVR的补偿极限电压为其可输出的最大电压幅值Ulim,其值由式(1)确定。DVR补偿范围如图4所示,图中各字母的含义与图2相同。以O′为圆心,参考电压正序分量幅值UL为半径作圆;再分别以A、B、C为圆心,Ulim为半径作圆。黑色虚直线之间即为参考电压正序分量各相的取值范围。
图4 DVR补偿范围
设故障时电网三相电压的幅值和相角分别为UA、UB、UC和αA、αB、αC,参考电压零序分量幅值和相角分别为UL0和αL0。由图4得向量O′A的幅值和相角为:
参考电压正序分量A相以向量O′A方向为起点可逆时针旋转的角度θa1和可顺时针旋转的角度θa2为:

与A相类似,可以分别得出向量O′B、O′C的幅值和相角αO′B、αO′C,以及参考电压正序分量B相、C相可逆时针旋转的角度范围θb1、θc1和顺时针旋转的角度范围θb2、θc2。由于θa1、θb1、θc1是各相单独考虑时可旋转的最大角度,为保证参考电压正序分量三相对称,其整体的旋转角度必须同时满足各相处于允许的范围内。依然以向量O′A的方向为起点,定义参考电压正序分量整体可逆时针旋转的角度为θ1,可顺时针旋转的角度为θ2,则θ1、θ2的表达式为:
θ1、θ2的取值存在4种情况:
(1)θ1、θ2>0,说明参考电压零序分量取当前值时,参考电压正序分量即可顺时针旋转,也可逆时针旋转。
(2)θ1>0,θ2<0,说明参考电压零序分量取当前值时,参考电压正序分量只可以逆时针旋转θ1,不可顺时针旋转。
3)θ1<0,θ2>0,说明参考电压零序分量取当前值时,参考电压正序分量只可以顺时针旋转θ2,不可逆时针旋转。
(4)θ1<0、θ2<0,说明参考电压零序分量取当前值时,DVR无法对故障电压进行补偿。
通过以上分析可以看出,通过注入零序分量可以有效增大DVR的补偿范围。由于零序电压的主要作用是调节补偿电压的幅值,因此其取值范围在满足系统要求的前提下可由下式确定,

式中:Umax和Umin分别为UA、UB、UC3个量之中的最大值和最小值。由于Ulim的值会随着DVR不断输出能量而减小,这也意味着DVR的补偿范围会不断减小,因此参考电压的取值不应该是一个固定值,而应随着补偿过程不断变化,才能最大限度地利用DVR储能装置储存的能量。
2 基于猫群算法的DVR补偿策略
2.1 目标函数
在DVR补偿范围内任取一处满足负载要求的参考电压,则DVR任一相输出补偿电压的幅值UDVRi和输出的总有功功率PDVR可表示为:

式中:ULi表示任一相参考电压的幅值;Ui表示任一相电网电压的幅值;Ii表示任一相负载电流幅值;φi表示任一相参考电压和电网电压的相角差;δi表示任一相参考电压和负载电流的相角差。
当电网故障电压在DVR的补偿范围内无法提供负载所需全部有功,则DVR需要输出有功功率来补偿电网电压以达到负载要求。此时DVR补偿范围会随着补偿过程不断缩小,直至故障电压完全超出DVR的补偿范围。当电网故障电压确定时,DVR的最小补偿电压幅值也确定,即DVR直流侧可释放的总能量确定。此时要使DVR补偿时间最长,其参考电压的取值因始终是补偿范围内使DVR输出有功功率最小的那个。因此目标函数的表达式可表示为:

式中:αL1为参考电压正序分量A相的相角,功率约束条件是为了避免直流侧从电网倒吸能量损坏储能装置。
2.2 基于猫群算法的补偿策略
在DVR补偿范围内找到一个使输出功率最小的参考电压,属于最优化问题的范畴,本文将猫群算法引入到求解使DVR输出功率最小的补偿电压的问题中。
猫群算法是一种模拟猫行为模式的群体智能算法,其具有计算简单、收敛速度快、寻优精度高等优点,完全能够满足DVR快速响应的要求[12]。每只猫的位置即为一组可行的参考电压,DVR输出功率即为猫的适应度,在DVR的补偿范围内执行猫群算法的搜索算子即可以获得使DVR输出功率最小的参考电压取值。
当检测到电网电压发生跌落时,由测得的电网电压、负载参数和参考电压即可确定DVR输出的有功功率。当DVR输出的有功为正时,需要实时监测DVR直流侧电压的变化,确保参考电压始终处于DVR补偿范围内。取监测周期为T,同时为了避免逆变器超调引入谐波,应留有一定的裕度,即直流侧实际电压应比用于计算补偿范围的直流侧电压大ΔU,ΔU的取值与监测周期T的关系为:

式中:C为直流侧电容值。可以看出,ΔU的取值也是随着直流侧电压和DVR输出功率变化而变化的。
综上分析,可得猫群算法的流程图如图5所示。
图5 猫群算法流程图
3 仿真结果
为了验证所提算法的DVR补偿策略可靠性,在Matlab/Simulink仿真平台进行测试。取正常工作时相电压幅值220 V,频率50 Hz,敏感负载容量为4.84 kVA,功率因数为0.866。
如图6所示为三相三线制系统A相电压跌落60%时采用传统的最小能量法和本文算法的仿真波形。其中直流电压的监测周期取0.01 s。图7、8为两种算法下补偿电压幅值的最大值和DVR输出功率的比较。
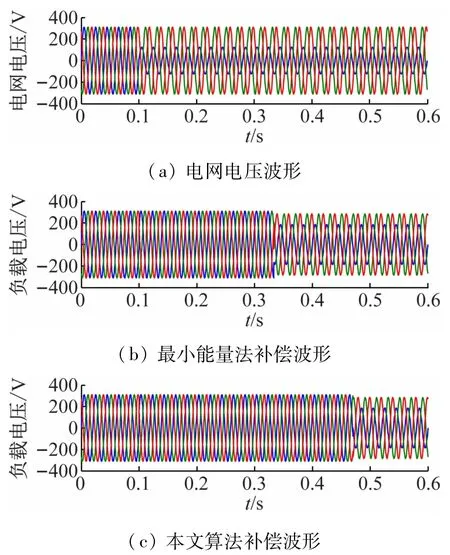
图6 三相三线制仿真波形
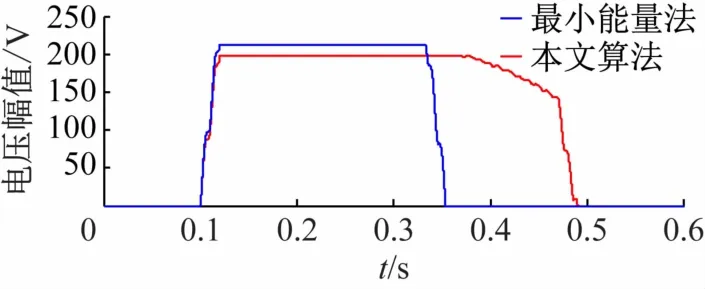
图7 补偿电压幅值比较
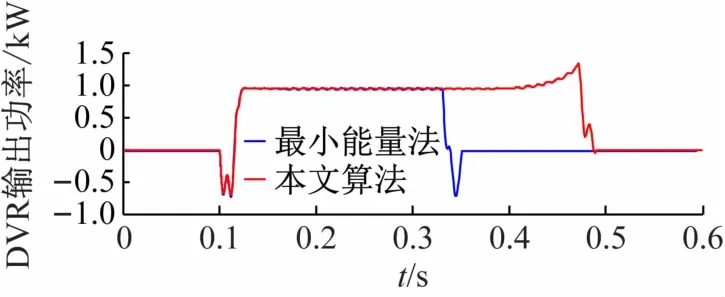
图8 DVR输出功率比较
由图6可知,在0.1 s时,电网电压发生跌落,此时DVR输出补偿电压使负载电压保持稳定。可以看出本文算法比最小能量法维持负载电压稳定的时间更长。由图7、8可以看出,DVR输出功率相同的情况下,注入零序电压能有效降低补偿电压的幅值,这就意味着储能电容有更长的放电区间。在0.34 s,最小能量法对应的参考电压超出DVR的补偿范围,DVR即停止补偿。本文算法能有效控制参考电压随着DVR补偿范围的变化而变化,最大限度地利用了储能装置储存的能量。
图9所示为DVR启动后采用猫群算法确定第1个参考电压的迭代过程。其中设置猫的数量为10,跟踪循环次数为3,记忆池容量为3,迭代次数为50次。
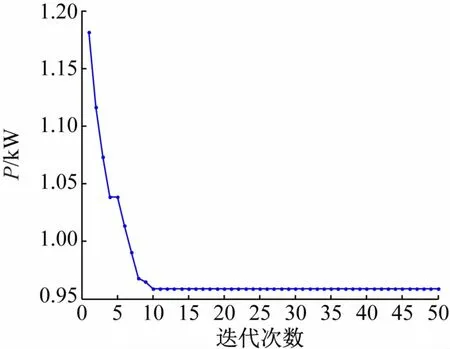
图9 猫群算法寻优过程
可以看出,猫群算法能够以较快的速度收敛到最优解,确保DVR始终工作在最小功率输出状态,实现真正意义上的时间最长补偿。
图10和图11分别为三相四线制下不考虑零序分量和允许少量零序分量存在的补偿情况比较。其中电网电压在0.05 s时,A相跌落10%,B相和C相跌落20%,同时伴有10°的相角偏移。
可以看出,在不考虑零序分量时本文算法依然比传统的最小能量法具有更长的补偿时间。而在注入零序分量的情况下,DVR的输出功率能进一步减小,有效延长了DVR的补偿时间。
4 结 语
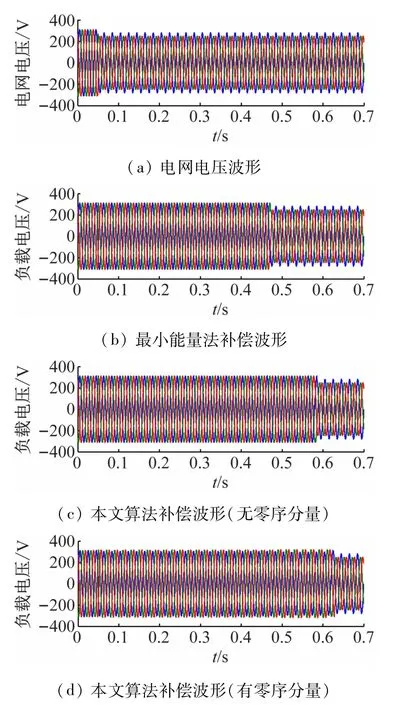
图10 三相四线制仿真波形

图11 DVR输出功率比较
通过分析得出零序分量的注入不仅能够扩大DVR的补偿范围,在允许少量零序分量存在的三相四线制中还能进一步降低DVR输出的有功功率。零序分量的这些特性都有利于提升DVR的补偿时间。因此,考虑电压零序分量前提下,提出了利用猫群算法的寻优能力,以DVR输出有功功率为目标函数,可以得出含零序分量的DVR最优补偿参考电压。当DVR补偿范围随着补偿过程不断缩小时,根据猫群算法的循环策略,能够有效地控制DVR始终工作在最小有功功率输出状态,同时提升DVR的补偿时间。
猜你喜欢
振动与冲击(2022年10期)2022-05-30
农村电气化(2021年10期)2021-10-19
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
唐山学院学报(2020年3期)2020-09-14
哈尔滨铁道科技(2020年4期)2020-07-22
机械制造与自动化(2020年3期)2020-07-16
液压与气动(2020年4期)2020-04-10
电子制作(2019年23期)2019-02-23
电子制作(2017年7期)2017-06-05