微小型可重构移动作战平台系统设计
2020-07-06 09:51唐术锋郭子瑞王国庆
兵器装备工程学报 2020年6期
唐术锋,郭子瑞,王国庆,王 旭,于 越
(内蒙古工业大学, 呼和浩特 010051)
近年来,随着军事技术的进步,战争形态也不断改变,作战体系的设计思路和研制策略也向自动化、微型化和模块化的方向高速迈进[1],具体包括:体系网络化、操控智能化、结构模块化和功能一体化[2]。目前,无人化作战系统开始经受实际作战环境的考验[3],未来的战争形态也将实现从信息时代到智能时代的跨越,而军事武器在技术更新的推动下也需要兼备独立作战能力和集群作战能力。
21世纪以来,欧美国家率先开始研制军用移动作战机器人,其中美国军方研制的Talon(魔爪)军用地面无人平台[3]、“蜘蛛”无人地面战车[4]、“天王星-9”多功能无人战车[5];以色列“守护者”无人车在2008年初开始在以色列国防军中服役,具有态势感知、自主机动和独立决策等能力[6];“龙行者”机器人是 QinetiQ公司在2010年推出的首款全模块地面机器人,其可由一人带标配背包进行操作[7];DARPA联合波士顿动力公司研制出一种新型的小型无人地面车SandFlea沙蚤机器人系统[8];近几年国内市场也涌现出许多微小型移动作战机器人,如中国“五虎”微型地面无人战车“GHRYSOR”、“MOSOR”、“ASENDRO EOD”、“ASENDROSCOUT”、“OFRO”[9]等。
依此设计了一种微小型可重构移动作战平台,其特点是基于“模块化”、“可重构性”等思想,将作战武器搭载在每个微小型移动作战平台上,通过每个作战平台之间的连接对接装置,实现各个移动作战平台的可重构功能,多个移动作战平台可根据实际作战需求进行两种作战模式的灵活转换,即单个独立移动作战平台网状—分散式作战模式和多个移动作战平台链式—集群式作战模式,从而提高了整体作战体系的灵活性和适应性。
1 微小型可重构移动作战平台总体方案
现阶段,投入到军事战地的移动作战平台仍然大多沿用单兵作战的旧模式,还存有单机移动作战平台攻击力较弱、攻击范围较小、移动作战平台外形庞大等问题。故设计一种微小型可重构移动作战平台,将作战武器或防御武器搭载到所设计的微小型移动作战平台,通过连接对接机构和远程控制,将多个作战平台进行编组,实现了物理上的“共生混合”和“自主适应”[10]。既提升了整体作战体系的灵活性又降低了设备的造价成本[11]。具体的协作作战模式如图1所示。
如图1所示,进入作战区域前,通过远程控制将多个微小型移动作战平台进行编组重构[12];进入实际作战区域,依靠可重构对接装置,自动划分为网状—分散式作战模式和链式—集群式作战模式。前者利用搭载在作战平台的不同传感器,收集地形资料,取得精准的地位和观测距离,后者利用链式结构特点,越过单体移动作战平台无法跨越的较宽缝隙,提升了移动作战平台在不同程度严峻地形的适应性,也有助于产生整体的协同作战图样并提高对于整体战争的态势感知;离开作战区域时,通过远程信号传输,将还有行走能力的移动作战平台进行再次重构,返回作战基地,完成作战资料收集和机体修复工作。
2 微小型可重构移动作战平台模块设计
2.1 移动模块的选择
通过对实际作战环境分析,可以发现其环境恶略、地形复杂,存在的障碍包括普通的粗糙地面、横向距离较大的沟壑以及行进方向较高的纵向障碍等,而目前投入到作战环境的移动作战平台的移动模块基本分为轮式、履带式、复合式3种类型,3种移动模块的综合性能如表1所示[13]。

表1 各类移动模块综合性能
通过以上分析,轮履复合式移动模块具有较全面的行进能力,且无论是轮式移动机构还是履带式移动机构都已经广泛应用于装甲车辆、工程机械等大型车辆行业,技术比较成熟,而所设计的微小型可重构移动作战平台是大型作战车辆的一个缩微体,可以将现有成熟的技术应用在该移动作战平台。采用轮履复合式的移动模块,不仅具有较强的越障能力,地形适应性也较高,负载能力也较强,所以可以适应复杂的非结构化环境。
2.2 微小型可重构移动作战平台的结构设计
根据实际作战环境分析,所设计的单体移动作战平台采用轮履复合式的行进机构,具体设计如图2所示。
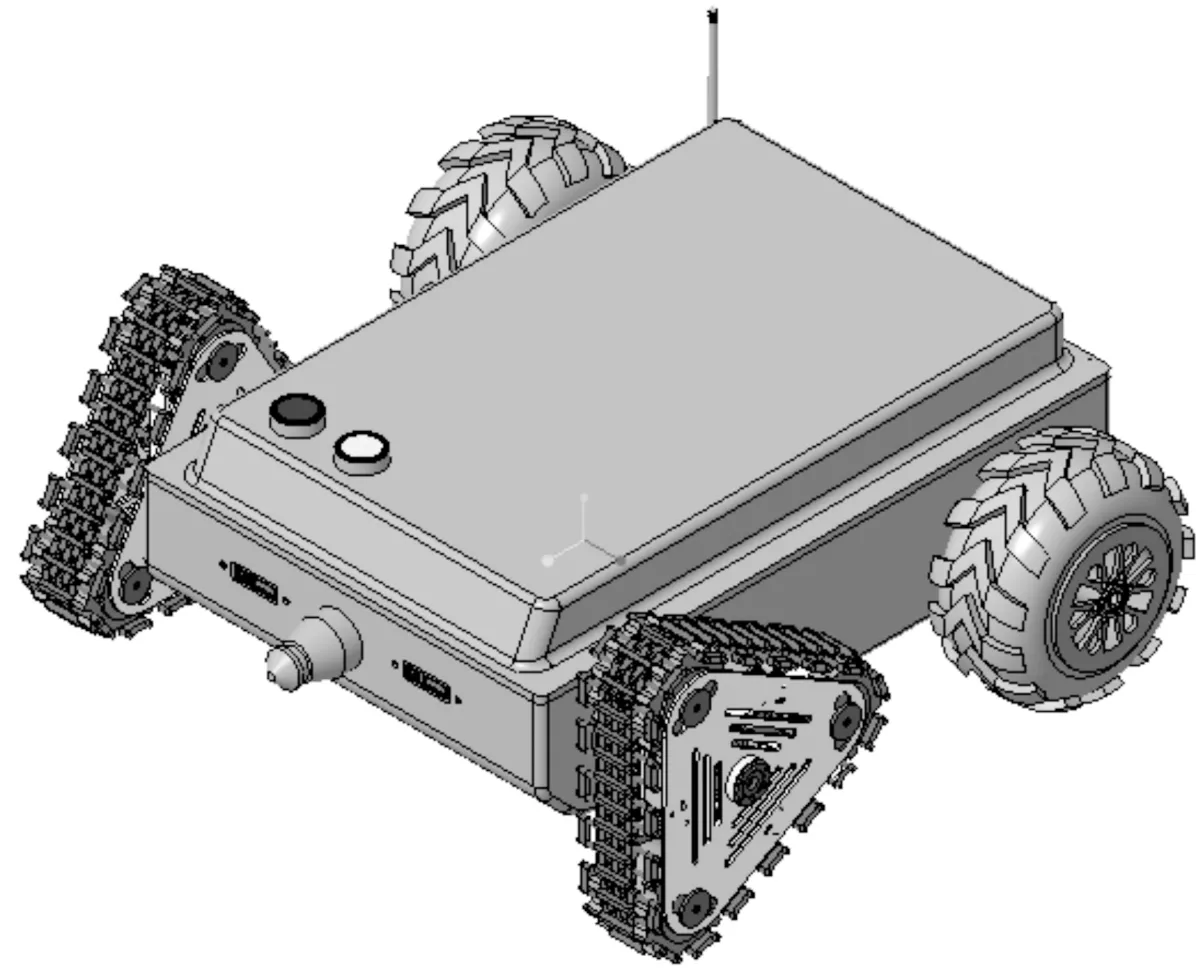
图2 单体移动作战平台的总体结构设计图
如图2所示,所设计的微小型可重构移动作战平台可分为4个模块单元,车体主体单元、行走模块单元、对接机构单元以及装载武器单元。
3 微小型可重构移动作战平台越障分析
所谓越障性能是指越过障碍物的能力,除了对于较宽缝隙的跨越以外,越障性能的好坏最突出体现在翻越类似壁面障碍物的能力,故重点对此进行研究。
当壁面障碍物低于三角形履带轮单轮的重心时,其应采取常规行走姿态越过障碍;当壁面障碍物高于三角形履带轮单轮且低于整个三角轮的重心时,其应采取翻转姿态越过障碍。为了有效测量该移动作战平台的极限越障高度,故只需考虑其翻转姿态下的越障过程。由于微小型可重构移动作战平台采用轮履复合式的行走方式,针对其机构特性,分别对前轮(即三角形履带式)、后轮(轮式)以及车体本体建立动力学平衡方程,并求解出该作战平台处于极限位姿情况下的若干重要参数,以判断其是否可以实现越障功能。
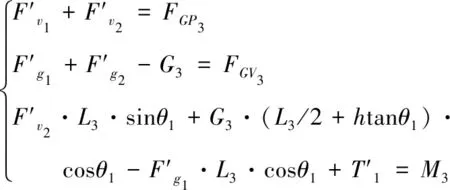
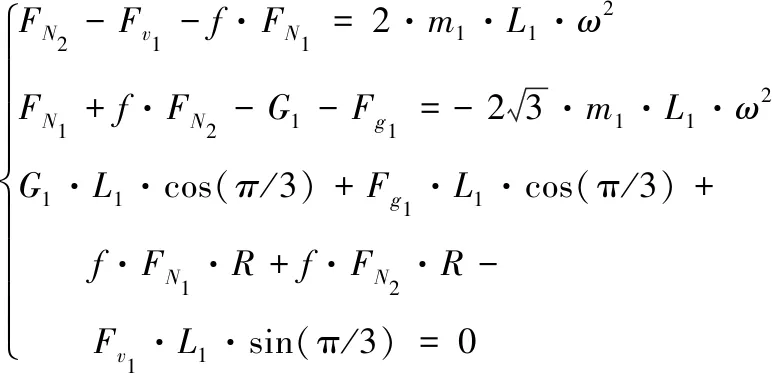
当该移动作战平台水平向右运动时,最前端的三角履带轮系开始接触到障碍物,其运动状态、运动方式开始有所改变,而且此时其履带表面与障碍的接触面积最大,故可认为此时的移动作战平台状态是翻越障碍过程中的临界位姿状态。根据达朗贝尔原理,建立移动作战平台在极限位姿时的运动学模型,模型由前三角履带轮系、后轮和车体3个部分的动力学平衡方程组式(1)~式(3)组成。模型后轮、前三角履带轮系及车体在极限位姿受力模型如图3所示。

图3 模型后轮、前履带轮系及车体在极限位姿受力模型示意图

(1)

(2)
(3)

前三角履带轮系的质心位置的表达式为:

(4)
其中∂=π/6+ωt。
后轮的质心位置的表达式为:

(5)
车体的质心位置的表达式为:

(6)
在前三角履带轮系接触前方障碍时,移动作战平台车体的惯性旋转角度θ1与前三角履带轮系翻转角度∂之间的关系表达式为:
L3·sinθ1=L1·sin∂-L1·sin(π/6)
(7)

(8)
式中J3表示模型车体的转动惯量。
由于该临界位姿位置可以看作整个车体翻转的起始位置,故设定t=0,并将数值代入式(8),然后将其与式(1)、式(2)和式(3)联立,可得式(9)、式(10)和式(11):
(9)

(10)

(11)
式(9)、式(10)、式(11)是对该移动作战平台在极限位姿下的动力学平衡方程。
现将已完成实体建模的微小型移动作战平台的真实参数代入上式,验证在极限状态下该模型的力矩需求是否小于所选减速器输出的最大力矩,进而验证其越障能力的可行性,具体模型参数如表2所示。

表2 微小型移动作战平台的模型参数
假定当作战平台处于极限位姿时,前三角履带轮系所带电机提供ω=1 rad/s的角速度,将ω的值代入式(9),式(10)和式(11)中,通过Matlab计算求解得到T1=2.34 N/m,小于减速器的瞬时最大转矩,因此可以顺利的完成越障等运动。
4 微小型可重构移动作战平台协同作战体系
由于实际战时环境复杂,包含垂直壁面障碍,跨度较大缝隙等影响作战平台前进的地形因素,故需要其实现跨越障碍、转弯避障等运动,以此来完成协同作战等功能。
4.1 对于较低垂直壁面障碍的协同运动策略
当微小型移动作战平台遇到前方有较低垂直壁面障碍时,其垂直距离需低于前三角形履带轮系的重心(如台阶等),利用运动模块中的三角形履带模块,翻转跨越壁面障碍,合理性已在第三节验证完毕。具体运动策略示意图如图4所示。其中图(a)~图(e)为一个运动周期。

图4 越过较低垂直壁面的运动策略示意图
4.2 对于较宽缝隙的协同运动策略
当单体移动作战平台遇到行进前方有较宽的缝隙无法跨越时,需要利用连接对接装置,将多个移动作战平台串联编组,将连接关节锁紧,合力通过缝隙,具体协同运动策略示意图如图5。

图5 越过较宽缝隙的运动策略示意图
4.3 微小型可重构移动作战平台协同作战体系
由于该微小型移动作战平台其具有可重构性,通过改变装载武器单元模块,搭载不同的作战武器和探测传感器,以此来满足协作作战需求。搭载的武器单元模块包括火炮、TNT炸药等进攻性武器,还有检测雷达等通讯类装置。对于更为复杂的实际作战需求,未来将可以搭载更强大的攻击性武器和防御性武器,同时也需要加强与无人机等空中作战设备的联系,形成“陆—空”两军联合作战体系。具体协同作战体系模拟示意图如图6。
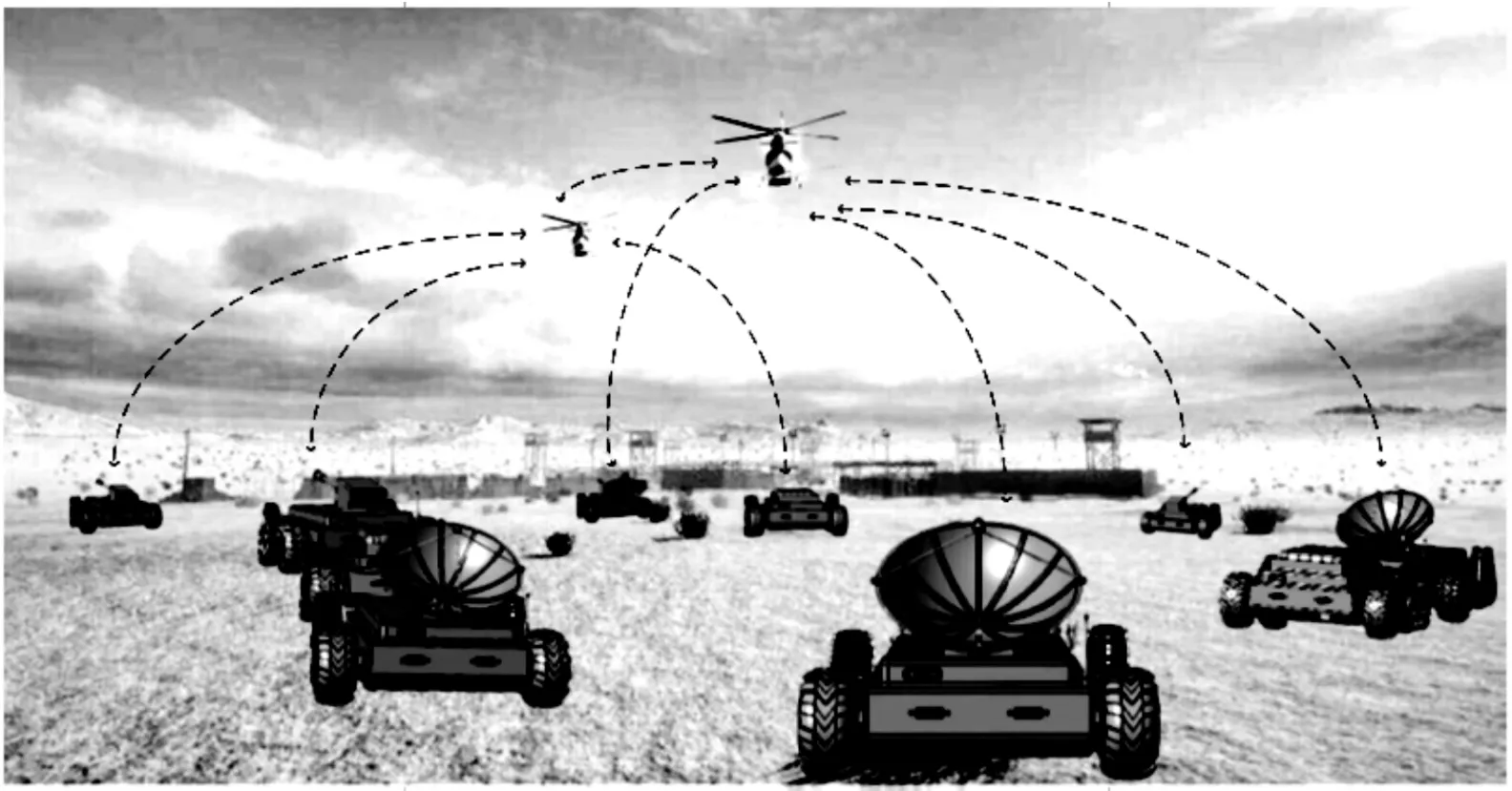
图6 微小型可重构移动作战平台协同作战体系模拟示意图
5 结论
结合实地作战环境,提出了一种微小型可重构的标准化移动作战平台,创新性的提出了由三角形履带与轮子组成的轮履复合式行进机构,完成了移动作战平台的运动学分析和越障性能分析,阐述了微小型可重构移动作战平台的协同运动策略,并提出在实际作战中移动作战平台可以实现网状—分散式和链状—集群式两种作战模式,为实际作战模式提供了新的思想和决策。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
表面技术(2022年2期)2022-03-03
宇航学报(2021年6期)2021-08-13
兵器装备工程学报(2021年3期)2021-04-09
中国科技纵横(2020年13期)2020-12-11
现代信息科技(2020年22期)2020-06-24
山东工业技术(2019年16期)2019-07-19
科技与创新(2018年12期)2018-06-22
创新作文(1-2年级)(2017年11期)2018-04-17