
基于小波神经网络模糊滑模控制的轮式移动机器人避障研究
2020-07-03 05:03:58王韬
中国工程机械学报 2020年3期
王 韬
(长春职业技术学院工程技术分院,吉林长春130033)
近年来,机械、电子和计算机技术发展迅速,与此同时,人工智能技术发展也得到提升,从而诞生了机器人。机器人涉及机械、电子及人工智能等多种学科,目前的机器人不仅仅是替代人类劳动进行生产,也正在向人类学习思考方向发展。迄今为止,机器人在各个行业都得到了广泛应用,包括工业、农业、海洋、太空及医疗等领域[1-2]。轮式移动机器人是机器人研究发展的重要组成部分,它在移动过程中,能够检测到周围环境信息而做出避障运动,从而完成复杂任务。因此,研究轮式移动机器人避障问题,对于促进机器人学科领域的发展具有重要的意义。
当前,许多研究者从多种角度对轮式移动机器人避障方法展开了研究。例如:文献[3-4]研究了轮式移动机器人模糊控制方法,给出了三轮移动机器人运动学模型,设计了避障系统控制框图,根据模糊规则设计了模糊规划控制器,通过实验观察移动机器人避障效果,解决了轮式移动机器人避障任务。文献[5-6]研究了轮式移动机器人避障滑模控制方法,针对机器人运动存在未知扰动问题,设计了滑模控制器,采用李雅普诺夫函数对机器人运动的稳定性进行证明,通过仿真和实验验证滑模控制避障效果,解决了机器人视觉定位数据的丢失问题。文献[7-8]研究了移动机器人避障神经网络控制方法,采用权值调节收敛速度和学习效率,给出了BP神经网络避障控制模型,通过仿真验证BP神经网络避障控制效果,提高了机器人对障碍物的识别率。但是,以往研究的轮式移动机器人在中速和高速移动时,容易发生急转弯现象,导致轮式移动机器人发生侧翻,从而造成不必要的损失。对此,创建轮式移动机器人二维模型,根据拉格朗日定理推导出机器人动力学方程式。引用滑模控制器,采用小波神经网络和模糊规则对滑模控制器进行改进,设计了轮式移动机器人小波神经网络模糊滑模控制器。采用Matlab软件对轮式移动机器人避障效果进行仿真验证,并与滑模控制避障效果进行对比,为深入研究轮式移动机器人避障方法提供参考价值。
1 轮式移动机器人
本文在平面直角坐标系中建立轮式移动机器人运动轨迹简图,如图1所示。

图1 轮式移动机器人Fig.1 Wheeled mobile robot
图1中:O点为终点位置;M点为起始位置;v为机器人移动速度;ω为机器人旋转角速度;r为机器人运动距离;φ为机器人航向角偏差。
根据拉格朗日定理,可以推导出轮式移动机器人动力学方程式[9]为

式中:H(q)为机器人惯性力矩;C(q,q')为科氏力矩;G(q)为重力矩矢量;F(q')为摩擦力矩矢量;τ为驱动力矩矢量;τd为外部干扰波形。
轮式移动机器人实际运动速度方程式[10]为

式中:(x,y,θ)为机器人实际位姿。
在直角坐标系中,非完整移动机器人跟踪误差变换方程式为

式中:(xr,yr,θr)为机器人期望位姿。
对式(2)求导后,可以推导出机器人跟踪误差方程式为

2 控制器设计
2.1 滑模控制
在有障碍物的环境中,轮式移动机器人跟踪目标就是使实际位姿与期望位姿吻合。定义的跟踪误差为qe=q-qr,其中,qe=[xe,ye,θe],设计的滑模面[11]为

式中:s=[s1,s2,s3]T;Λ=diag(r1,r2,r3)为正对角矩阵,ri为滑模面斜率且ri>0。
滑模控制器设计[11]为

式中:p=diag(p1,p2,p3)为正对角矩阵,pi>0;K=diag(k1,k2,k3)为正对角矩阵,ki>0。
2.2 小波神经网络
小波神经网络是新的前馈神经网络模型,主要由小波变换理论和人工神经网络两个部分组成。小波函数由神经网络激励函数转换生成,具有很强的逼近和自适应学习能力。
输入变量为X=[x1,x2,…,xn]T,隐含层基向量为φ=[φ1,φ2,…,φm]T,激励函数采用小波函数[12],即

式中:aj=[a1,a2,…,am]为神经网络节点伸缩参数;bj=[b1,b2,…,bm]为神经网络节点平移参数;ωj=[ω1,ω2,…,ωm]为神经网络权值矩阵。
小波神经网络第s个样本第k个神经元输出量为

为了对参数进行训练,采用小波神经网络误差函数进行评价,其表达式为

式中:E为误差;S为样本对数;L为网络输出节点数量为期望输出量。
神经网络参数采用梯度下降法进行训练,其表达式为

2.3 小波神经网络模糊滑模控制
令滑模控制器函数为

式中:x为输入变量。
采用小波神经网络对滑模控制器函数进行逼近,神经网络输入为

根据小波神经网络逼近定理,小波神经网络期望输出函数为

式中:φ(x)=[φ1,φ2,…,φn]T为小波输出函数;ω*为神经网络权值矩阵;ξ=[ξ1,ξ2,…,ξn]T为神经网络逼近误差。
小波神经网络实际输出函数为

取Δω=ω*-ω*a为逼近权值,Δω为权值误差,f(ax)为(fx)的网络逼近值。
机器人当前移动点到滑模面的距离公式为

通过di对滑模控制切换增益系数ki进行调整。模糊控制输入输出规则定义如下:若di为NBB,则ki为PBB;若di为NB,则ki为PB;若di为NM,则ki为 PM;若di为 NS,则ki为 PS;若di为NSS,则ki为PSS;若di为 Z,则ki为 Z;若di为 PSS,则ki为 PSS;若di为PS,则ki为PS;若di为PM,则ki为PM;若di为PB,则ki为PB;若di为PBB,则ki为PBB。
在上述模糊规则中,NB为负大,NBB为负大大,NS为负小,NSS为负小小,NM为负中,Z为零,PS为正小,PSS为正小小,PM为正中,PB为正大,PBB为正大大。
因此,小波神经网络模糊控制器设计为
2.4 稳定性分析
取

根据式(1)、式(5)和式(11)可得

根据式(13)、式(16)和式(17)可得

根据模糊系统逼近定理,可以得到

控制系统自适应定律为

根据李雅普诺夫函数[13]可得


对式(17)求导变换后可得

假设正实数满足下列关系:

若0<ρi<1,则可以推导出

因此

式中:ρ=diag(ρ1,ρ2,···,ρn)。
取pi>ρi,则可以推导出

根据李雅普诺夫判别定律可知,控制系统全局是稳定的。
3 仿真及分析
为了对比移动机器人在不同控制方法下避障效果,采用Matlab软件对移动机器人运动路径进行仿真。机器人参数设置如下:K=diag(0.4,0.4,0.4),Q=diag(30,30,30),P=diag(60,60,60),Λ=diag(6,6,6),初始位姿为q=(0,0,0)。假设机器人移动速度分别为低速(40 km/h)、中速(80 km/h)和高速(120 km/h),则移动机器人避障碍效果分别如图2~图4所示。
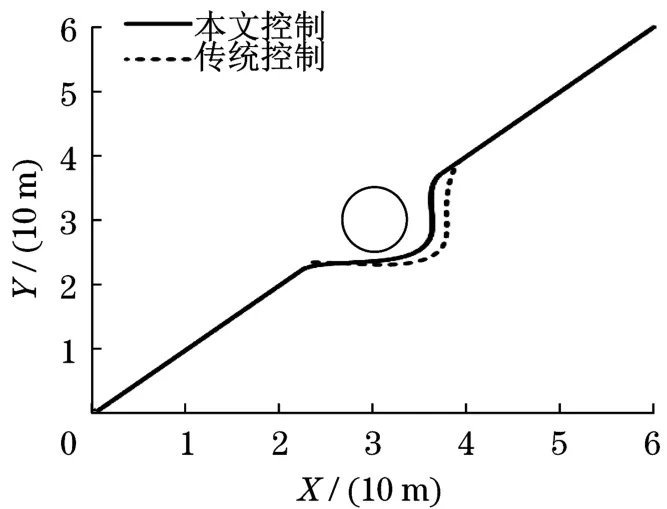
图2 低速避障效果Fig.2 Obstacle avoidance effect at low speed
根据图3可知:在低速行驶时,采用滑模控制和小波神经网络模糊滑模控制方法,移动机器人基本上在同一位置做出反应,能够较好地避开障碍物。根据图4可知:在中速和高速行驶时,采用滑模控制方法,移动机器人离障碍物较近时才开始做出反应,反应速度较慢,而采用小波神经网络模糊滑模控制,机器人离障碍物较远时就开始做出反应,反应速度较快。因此,移动机器人采用小波神经网络模糊滑模控制方法,能够提前预测到障碍物,避免移动机器人发生急转弯现象,从而避免机器人发生侧翻现象。

图3 中速避障效果Fig.3 Obstacle avoidance effect at medium speed

图4 高速避障效果Fig.4 Obstacle avoidance effect at high speed
4 结论
本文研究了移动机器人避障问题,采用小波神经网络模糊滑模控制方法,并对避障效果进行仿真验证,主要结论如下:①小波神经网络模糊滑模控制方法,结合了小波神经网络和模糊滑模控制的各自优点,具有在线自适应调节功能;②移动机器人采用小波神经网络模糊滑模控制方法,遇到障碍物时,能够提前预测到,迅速做出反应,有效地避开障碍物,避免急转弯导致机器人发生侧翻现象;③采用Matlab软件对移动机器人在有障碍物环境中进行仿真,模拟移动机器人在复杂环境中工作效果,进一步验证小波神经网络模糊滑模控制的先进性,为深入研究移动机器人控制方法提供理论依据。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:12
军民两用技术与产品(2021年10期)2021-03-16 06:05:36
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
经济技术协作信息(2018年7期)2019-01-14 03:05:40
中国军转民(2018年1期)2018-06-08 05:52:57
制造技术与机床(2017年3期)2017-06-23 08:11:21
筑路机械与施工机械化(2014年7期)2014-03-01 03:00:18
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28 12:21:31
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28 12:21:19
