基于人工鱼群算法优化的车辆防滑PID神经网络控制研究
2020-07-03 05:03麦鹏
中国工程机械学报 2020年3期
麦 鹏
(西安汽车职业大学汽车工程学院,陕西西安710600)
随着社会的发展,汽车保有量也在逐步上升,同时车辆行驶的安全性也越来越受到高度关注。车辆在复杂路况行驶时,在转弯时容易发生侧滑甚至发生漂移现象,导致车辆发生交通事故[1-2]。在车辆安全性控制方面,路面滑转率参数识别变得非常重要。车辆侧滑控制系统就是要使控制的车辆滑转率在最优附近,保持车辆尽可能利用路面附着系数。复杂路况不同路段,最优滑转率也各不相同。车辆控制系统能够对路面滑转率进行预估,做出判断后迅速调整控制参数,从而使车辆稳定、安全行驶。因此,研究车辆驱动防滑控制系统,对于提高车辆行驶的安全性变得非常关键。
当前,车辆防滑控制技术吸引了很多研究者的关注,从而产生许多理论方法。例如:文献[3-4]研究了四轮车辆独立驱动防滑模糊控制方法,给出了单轮车辆动力学模型,设计了模糊控制器,建立整车模糊控制算法仿真模型,缩短了车辆的滑转调节时间。文献[5-6]研究了客车电驱动非线性模型预测控制方法,建立整车动力学模型,设计非线性模型最优滑转率控制目标函数,采用仿真验证不同路况滑转率跟踪效果,增强了车辆驱动能力和稳定性。文献[7]研究了拖拉机驱动改进PID控制方法,建立车轮滑转率方程式,引用PID控制方法,采用改进粒子群算法优化PID控制参数,通过不同路况对拖拉机滑转率进行仿真,有效地抑制了滑转率突变现象。以往研究的车辆防滑控制系统容易受到路面激励波形的干扰,对此,引用多神经网络结构,设计了PID神经网络控制系统,采用人工鱼群算法优化PID神经网络控制方法。采用数学软件Matlab对车辆防滑控制系统跟踪效果进行仿真验证,并且与传统PID控制效果进行比较,为深入研究车辆行驶的稳定性和安全性提供理论依据。
1 车辆驱动模型
采用简化模型对车辆驱动进行分析,如图1所示。通过对车辆进行受力分析,可以推导出车辆动力学方程式[8]为
式中:M为车辆质量;Fxi为后轮驱动力;J为车轮转动惯量;αi为后轮角加速度;Ti为后轮力矩;v为车辆运动速度;ω1,ω2为前轮角速度;ωi为后轮角速度;Si为后轮滑转率;μ为路面附着系数;Fzi为后轮承载力;ay为车辆横向加速度;h为车辆质心高度;dr为后轮轮距;ax为车辆纵向加速度;l为前轮和后轮轴距。

图1 车辆驱动模型简图Fig.1 Vehicle driving model diagram
车辆在不同路面行驶,轮胎与路面附着系数也不相同,轮胎滑移率与附着系数的关系式[9]为

式中:C1,C2,C3为拟合系数;S为轮胎滑移率;μ为附着系数。
最优滑移率和最大附着系数计算公式为
2 PID神经网络控制
2.1 PID神经网络控制结构
假设控制对象包括n输入和n输出的多变量参数,则PID神经网络控制器为2n×3n×n的三层前向网络结构。PID神经网络包含输入层、隐含层和输出层[10]。多输入多输出的PID神经网络的控制系统结构如图2所示。图中:r1,r2,r3为控制系统理论输入值;u1,u2,u3为PID神经网络输出值;y1,y2,y3为控制系统输出值。
2.2 PID神经网络控制算法
PID神经网络各层控制算法计算公式如下:
输入层:主要包括2n个神经元,其输入、输出函数关系式[11]为
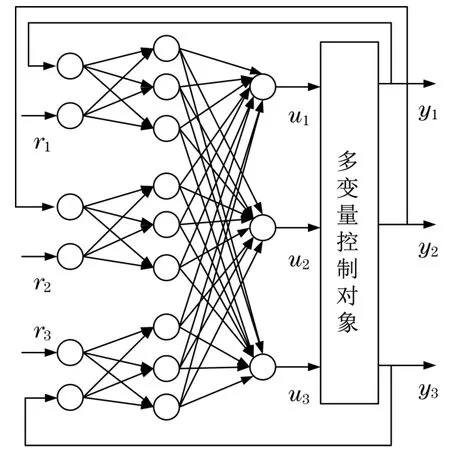
图2 多输入多输出PID神经网络控制结构Fig.2 PID neural network control structure with multi input and multi output

式中:Xsi为输入层的输入值;xsi为输入层的输出值;k为采样时刻;s为子网序号;i为输入层序号。
隐含层:主要包括比例、积分和微分神经元各n个。三种神经元输入方式是相同的,其计算公式[11]为

在输出方式上,三种神经元各不相同,其中,比例神经元输出方式为

积分神经元输出方式为

微分神经元输出方式为

式中:j为隐含层序号;wsij为输入层与输出层调整权值;xsi为神经网络输出值。
输出层:主要包含n个神经元,输出层输入值计算公式为

输出层输出计算公式为

式中:h为输出层序号;usj为隐含层输出值;ωsjh为隐含层与输出层连接权值。
PID神经网络学习目标函数为

式中:m为采样点数;n为控制变量个数;rp为系统输入值;yp为系统输出值。
3 改进PID神经网络控制
3.1 人工鱼群算法
人工鱼群算法是通过模拟鱼群的觅食、聚群、追尾行为,从而达到全局优化的目的。假设人工鱼群当前状态为Xi,随机生成另外一种状态为XjXi=[xid],Yi=f(Xi),其中f()为目标函数。人工鱼个体之间的距离为dij=Xi-Xj,其拥挤度因子为δ,移动步长为step,视野范围为visual。人工鱼群算法具有以下几种行为:
(1)觅食行为。人工鱼群算法当前状态为Xi,在感知范围内,随机生成另外一个状态Xj。若Yi<Yj,则向前移动一步,即Xi/n;否则,重新生成随机状态Xj,多次尝试后仍然不满足条件,则随机移动一步。其表达式为

式中:step为人工鱼移动的步长;R()函数为区间[0,1]随机数。
(2)群聚行为。人工鱼群在可视范围内中心位置状态为Xc,若Yc/nf>δYi(nf为同伴数目),表明同伴中心食物较多且周围不太拥挤;否则,执行觅食行为。其表达式为
(3)追尾行为。人工鱼群在可视范围内搜索到的食物浓度最大状态为Xm,若Ym/nf>δYi,表明Xm状态食物浓度较高且周围不太拥挤,则Xm向前移动一步;否则,执行觅食行为。其表达式[12为
3.2 人工鱼群算法优化步骤
步骤1定义参数变量:设置鱼群数量为N,最大迭代次数为Tmax,拥挤度因子为δ,移动步长为step,视野范围为visual,最大试探次数为try。
步骤2计算初始鱼群自身状态变量,选择最优值赋给公告板。
步骤3每条个体鱼通过觅食、追尾和聚群行为后,对比行为前后状态向量,选取较优行为执行,通过神经网络学习目标函数评价个体的状态向量。
步骤4对比适应度值,选择个体鱼状态最优值与公告板状态进行对比,若个体鱼优于公告板状态,更新公告板状态,若公告板优于个体鱼状态,则保持不变。
步骤5判断迭代次数,若达到最大迭代次数,则输出最优值,否则,跳到步骤3。
步骤6将最优值输入到PID神经网络控制器,用于控制车辆滑移。
4 仿真及分析
为了验证人工鱼群算法优化PID神经网络控制效果,采用Matlab软件对车辆滑移跟踪进行仿真。仿真参数设置如下:人工鱼群数量N=50,最大迭代次数Tmax=200,拥挤度因子δ=0.625,移动步长step=0.3,视野范围为visual=0.5,最大试探次数try=50,输入层到隐含层学习速率ηsij=0.001,隐含层到输出层学习速率ηsjh=0.006。假设车辆以20 km/h行驶路面附着系数分别为0.6,0.2和0.4,车辆驱动力矩分别为600,200和400 N·m。采用PID控制方法,车辆滑移率和驱动力矩仿真结果分别如图3和图4所示;采用人工鱼群算法优化PID神经网络控制方法,车辆滑移率和驱动力矩仿真结果分别如图5和图6所示。
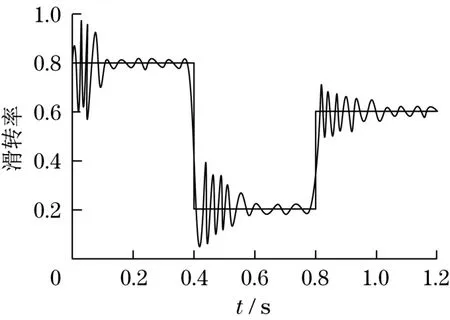
图3 滑转率PID控制Fig.3 Slip rate by PID control

图4 驱动力矩PID控制Fig.4 Driving torque by PID control
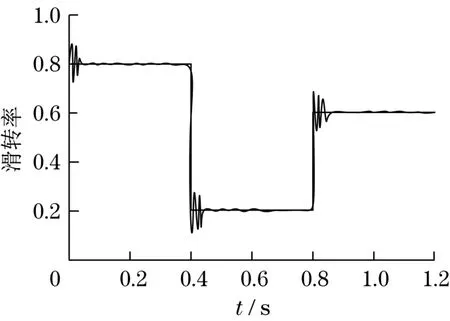
图5 滑转率改进PID控制Fig.5 Slip rate by PID control
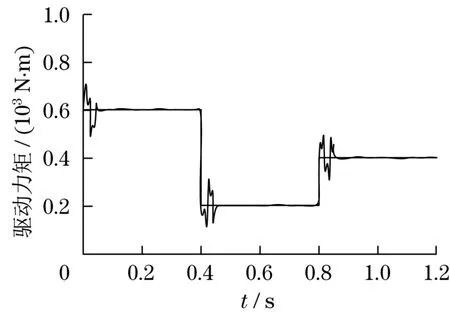
图6 驱动力矩改进PID控制Fig.6 Driving torque with improved PID control
由图3和图4可知:采用传统PID控制方法,车辆实际滑转率和驱动力矩与理论值偏离较大,滑转率和驱动力矩波动幅度较大。由图5和图6可知:采用人工鱼群算法优化PID神经网络控制方法,车辆实际滑转率和驱动力矩与理论值偏离较小,滑转率和驱动力矩波动幅度较小。车辆在复杂路面环境中行驶,容易受到多种因素的干扰,传统PID控制方法反应速度慢。而人工鱼群算法优化PID神经网络控制方法,反应速度快,能够快速地调节PID控制参数,使控制系统快速地适应复杂路况。因此,采用人工鱼群算法优化PID神经网络控制方法,控制系统运行相对稳定,从而防止车辆发生侧滑现象。
5 结论
针对车辆在复杂路面行驶容易发生侧滑问题,采用改进PID控制方法,并对跟踪效果进行仿真实验,主要结论如下:①采用改进PID控制方法,能够抑制复杂路况波形的干扰,在线输出PID控制最优参数;②车辆行驶在复杂路况上,传统PID控制滑转率产生的偏差较大,车辆加速时间较长,而采用改进PID控制滑转率产生的偏差较小,车辆加速时间较短;③与传统PID控制相比,改进PID控制超调量较小,车辆驱动力矩跟踪效果较好,对车辆产生的振动幅度较小,车辆行驶较为稳定。
猜你喜欢
军事文摘(2022年8期)2022-11-03
中国特种设备安全(2022年2期)2022-07-08
小学科学(学生版)(2021年3期)2021-04-13
哈哈画报(2021年11期)2021-02-28
中国交通信息化(2020年11期)2021-01-14
电子制作(2019年23期)2019-02-23
中外文摘(2017年19期)2017-10-10
中国篆刻·书画教育(2017年5期)2017-06-08
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09