
四轮路面激励生成工具开发及应用
2020-07-03 06:20徐嘉浩郑玲玲
汽车工程学报 2020年3期
徐嘉浩,顾 久,郑玲玲,赵 旗,李 杰
(1.吉林大学 汽车仿真与控制国家重点实验室,长春 130025; 2.一汽-大众汽车有限公司,长春 130011)
进行汽车平顺性研究,需要描述路面激励,即建立路面激励模型[1]。采用四轮汽车模型分析平顺性,更接近实车状态,这就需要建立四轮路面激励模型。
基于滤波白噪声方法描述路面激励,原理明确,使用方便,应用广泛[2-3]。但是已有的基于滤波白噪声方法生成路面激励的研究,既没有说明如何生成所需白噪声,也没有开发便于实际应用的四轮路面激励生成工具。因此,研究四轮路面激励模型建立方法和开发其生成工具,自动生成不同路面类型和车速组合下的四轮路面激励数据,具有研究价值和应用意义。
本文将基于滤波白噪声方法建立四轮路面激励模型,应用Matlab 的Guide 模块开发四轮路面激励生成工具,将其应用于空间汽车11 自由度振动模型,说明所建立的四轮路面激励模型及其开发工具的有效性,为四轮路面激励生成工具的实际应用提供理论和方法基础。
1 四轮路面激励模型
1.1 单轮路面激励模型
参考国际标准和国家标准对路面功率谱密度的描述,同时考虑到低频情况下频率趋向于0 时,路面功率谱密度会趋向无穷大的实际情况,将路面功率谱密度Gq(f)表示为[4]:
式中:f为时间频率;为路面不平度系数,根据路面等级选择[5];u为车速。
对应式(1),可以得到单轮路面激励模型为[4]:

式中:q(t)为单轮路面激励;w(t)为单位功率谱密度和零均值的高斯白噪声。
1.2 前后轮路面激励模型
假设汽车前后轮迹重合,后轮路面激励与前轮路面激励相比存在时间延迟。前后车轮轴距用L表示,则时间延迟td为:

按照上面的假设,后轮路面激励qr(t)和前轮路面激励qf(t)的关系为:

由一阶Pade 逼近等效计算时间延迟系统,后轮和前轮的路面激励传递函数Grf(s)为[6]:

式中:qr(s)为qr(t)的拉普拉斯变换;qf(s)为qf(t)的拉普拉斯变换;s为拉普拉斯算子。
对式(6)进行拉普拉斯反变换,可得:

1.3 左右轮路面激励模型
左轮路面激励q1(t)和右轮路面激励q2(t)之间存在相干性,假设左右轮路面激励的统计特性相同,相位差为0,则左右轮路面激励的相干性关系为[5]:

式中:coh(s)为左右轮相关函数。
针对coh(s)已经建立了多种公式,其中一种通用公式为[7]:

式中:Bf和Br分别为前轴轮距和后轴轮距。
将式(9)代入式(8),应用一阶Pade 逼近等效式(8)[6],有:

对式(10)进行拉普拉斯反变换,可得:

1.4 四轮路面激励模型
将汽车左前轮、右前轮、左后轮、右后轮的路面激励分别表示为q1(t)、q2(t)、q3(t)、q4(t),采用式(3)描述q1(t),即:

将式(12)代入式(11),有:

在式(7)中,由q1(t)代替qf(t),q3(t)代替qr(t),再引入式(12),得:
在式(7)中,由q2(t)代替qf(t),q4(t)代替qr(t),再引入式(13),得:
引入路面激励向量q:

联立式(12)~(15),得:

2 四轮路面激励生成工具的Matlab 开发
2.1 高斯白噪声的生成
在Matlab 中,高斯白噪声由wgn(m,n,p,‘linear’)函数产生。其中,m、n分别表示生成的零均值高斯白噪声序列的行数、列数,如果生成一行长度为n的白噪声序列,则m取1;p表示功率,默认单位为dBW,如果在参数p后方增加参数值‘linear’,则将单位改为W。
给定单边功率谱密度1,时间间隔dt,参数p表示为:

由式(20)确定p后,再通过wgn(1,n,p,‘linear’)就可以生成单位功率谱密度和零均值的高斯白噪声。
2.2 四轮路面激励模型的求解
式(17)是一阶微分方程组,求解需要7 个变量:仿真时长T、时间间隔dt、路面不平度系数Gq(n0)、车速u、前后轴距L、前轴轮距Bf和后轴轮距Br。其中,Gq(n0)对应A-H 路面等级[5]。
给定上述7 个变量后,可以采用Runge-Kutta算法求解式(17)。在Matlab 中,采用对应Runge-Kutta 算法的ode45 函数进行求解。
2.3 图形用户界面软件开发
在Matlab 中,开发图形用户界面(GUI)软件的主要过程,如图1 所示。其主要步骤如下:
(1)启动Guide 模块
在Matlab 窗口,在命令行输入“guide”,按“回车”键,即进入GUI 创建模板选择界面。
(2)新建空白GUI 模板
在创建模板选择界面,选择“Blank GUI”,点击“确定”,即进入GUI 设计界面,新建一个空白GUI 模板。
(3)设计图形界面和保存fig 文件
在GUI 设计界面,直接拖动所需控件到设计区,为控件调整大小及位置,修改其属性等。界面设计完成后,通过菜单路径“文件>保存”,进行保存,文件夹下会出现同名fig 和m 文件。
(4)编辑m 文件并运行调试
(5)导出fig 和m 文件到一个m 文件
实际fig 文件内容完全可用m 程序表示,通过菜单路径“文件>导出”,将其合并为一个m 文件。
(6)编译m 文件生成exe 软件
在Matlab 窗口,使用“mcc -m 文件名”指令,将m 文件编译成exe 格式文件,可以在装有“MCRinstaller.exe”环境的电脑上直接运行。

图1 Guide 开发GUI 软件的基本步骤
2.4 四轮路面激励图形用户界面设计
使用Guide 模块中可编辑文本、静态文本及按钮等元素,设计了GUI 界面,如图2 所示。

图2 设计的四轮路面激励生成工具图形用户界面
保存GUI 界面,在同一文件夹下,会出现两个扩展名分别为fig 和m 的同名文件。fig 文件用于存放图2 中各种元素的位置及尺寸信息;m 文件用于存放各种元素的多个函数,并且不同函数结尾不用添加end。
每个元素都有一个变量名,可以进行编辑,均可以在m 文件中添加其变量名加CreateFcn、Callback 或Button DownFcn 等命名的函数。这三种函数较常用,不必为每个元素添加所有函数。
而英语的否定句则相对简单,在简单句中,若含有系动词be、情态动词或助动词时,直接在这些动词后面加not构成否定句;而当谓语动词为行为动词时,则根据时态在动词前面加上do的变位和not构成否定句。
CreateFcn 可以在GUI 界面启动前运行,控制元素的属性;Callback 在GUI 界面启动后,使用该元素时才运行,如对于可编辑文本元素,输入数据后,才执行此函数;Button DownFcn 表示点击此元素后,才执行相应程序。
针对图2 中7 个参数的可编辑文本框,创建Callback 函数,实现输入数据获得功能,函数中采用global 命令,声明为全局变量,以便进行参数传递。针对图2 中的“生成”按钮,创建Button DownFcn函数,将四轮路面激励模型一阶微分方程组求解和图像显示程序放入函数中,实现按下按钮开始计算和显示图像的功能。针对“保存”按钮,添加Button DownFcn 函数,实现按指定格式保存结果到txt 文件的功能。
编辑好m 文件后,运行m 文件,可以启动GUI,如图3 所示。在GUI 界面中,输入全部参数,按下生成按钮进行计算求解,并且将结果图像显示在界面中。按下保存按钮,可以将结果按指定的格式存到txt 文件中,方便后续使用。
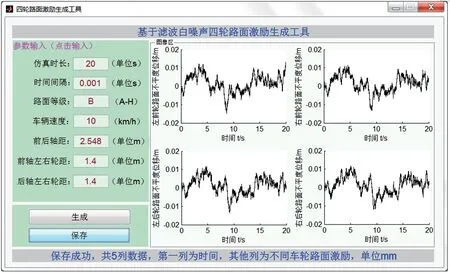
图3 四轮路面激励生成工具的图形界面
生成的四轮路面激励数据按照5 列形式存储,如图4 所示,第1 列为时间,其它4 列分别对应左前轮、右前轮、左后轮和右后轮的路面激励数据。

图4 自动生成的四轮路面激励数据
3 四轮路面激励生成工具的应用
3.1 四轮汽车11 自由度系统振动模型
假设不计车体质心绕z轴角振动,不计汽车质心水平面内的振动,考虑簧载质量的垂向、俯仰和侧倾运动,前后排座椅和4 个车轮的垂向振动,四轮汽车简化为11 自由度系统振动模型,如图5 所示。其中参数见表1。
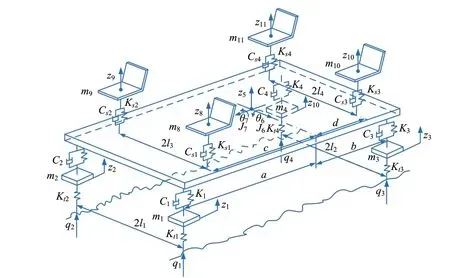
图5 四轮汽车11 自由度系统振动模型

表1 四轮汽车11 自由度系统振动模型参数
由拉格朗日方程,四轮汽车11 自由度系统振动模型微分方程用矩阵可表示为[8]:

式中:m、c、k分别为质量矩阵、阻尼矩阵、刚度矩阵;z为位移响应向量;kf为4 个轮胎刚度组成的刚度矩阵。
为了求解式(21),首先要生成四轮路面激励向量q,其可以应用开发的四轮路面激励生成工具自动获得路面激励数据txt 文件。
获得q后,应用Matlab 编程,读入生成的路面激励数据txt 文件作为输入,求解式(21)就可以得到z、z˙ 和˙z˙。
3.2 评价指标
由4 处座椅上人体质心加速度的响应数据,可以计算其均方根值,即:

式中:xi为加速度响应数据;N为响应数据个数。
确定4 处座椅上人体质心加速度的均方根值,将它们作为评价平顺性的评价指标。
3.3 仿真应用
在B 级路面上,车速由10 km/h 到100 km/h,采用某轿车数据[8],应用开发的四轮路面激励生成工具自动获得增量为10 km/h 的多组路面激励数据文件。
将四轮路面激励数据文件作为输入,进行多组仿真试验,可以得到评价指标和车速之间的关系,见表2。
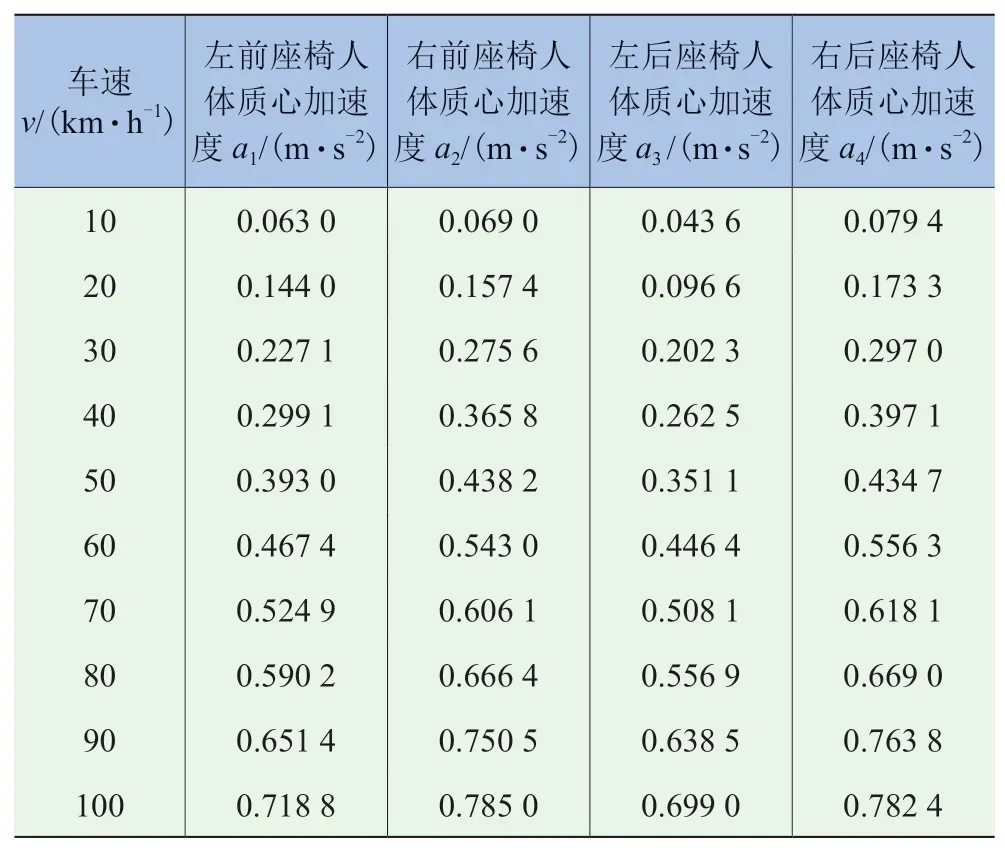
表2 B 级路面下10 ~100 km/h 范围内的评价指标
由表2 可知,4 处座椅上人体质心加速度,随着车速的增加而不断增加,表明随着车速增大,驾驶员和乘员的乘坐舒适性降低。
4 结论
基于滤波白噪声方法建立了四轮路面激励模型,给出了Matlab 中高斯白噪声生成函数wgn 的参数设置方法。
使用Matlab 中的Guide 模块,开发了四轮路面激励生成工具,可以应用图形用户界面方便地输入相关参数,快速自动生成四轮路面激励,并将数据存放到txt 文件中。
将四轮路面激励生成工具生成的四轮路面激励数据,输入到四轮汽车11 自由度系统振动模型中,获得了B 级路面上不同座椅位置人体质心加速度与车速的关系,用于评价汽车平顺性,说明了所建立的四轮路面激励模型及其开发工具的有效性。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
电脑报(2022年24期)2022-07-01
舰船科学技术(2021年12期)2021-03-29
小学生学习指导·爆笑校园(2019年6期)2019-09-10
发明与创新·中学生(2017年7期)2017-07-10
饮食科学(2016年7期)2016-07-27
红蜻蜓(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10
现代电子技术(2009年13期)2009-08-31
