一种基于差分滤波的红外舰船目标检测方法
2020-07-02 01:43修炳楠吕俊伟鹿珂珂
指挥与控制学报 2020年2期
修炳楠 吕俊伟 鹿珂珂
1.海军航空大学山东烟台264001
无人机对指定区域的舰船目标进行侦察监视时,如果对被侦察目标缺乏有效的预先样本图像积累,很难使用机器学习等需要大量样本图像数据的方法进行图像目标检测.在这种情况下,可以采用预先分析红外舰船目标特征,根据目标特征设计检测器的方式来进行图像目标检测.
目前,红外舰船目标检测典型的研究方向有特征判别、视觉显著性检测和背景剪除等.其中,特征判别类算法一般根据图像的全局或者局部特征来检测目标.经典的点特征检测算法是Harris 提出的角点检测算法[1].该算法用微分算子和矩阵特征值进行检测.算法对噪声不敏感且具有旋转不变性.因其具有较高的检测准确率,至今依然被应用于目标检测.Harris-Laplacian 检测算子[2−3]将Harris 角点检测算子与高斯尺度空间相结合,使角点检测增加了尺度不变性.高斯拉普拉斯检测算子(Laplace-of-Gaussian,LoG)[4−5]与Harris-Laplacian 采用相同的尺度选择函数.但是LoG 算子采用了更能突出特征点显著度的位置选择函数,常用来进行斑点检测.高斯差分算子(Difference-of-Gaussian,DoG)[6−7]为了避免LoG 算子求取中必须进行的二阶微分运算,转而采用一组特定常量对图像作卷积,减少了计算量,并且取得与LoG 算子近似的结果.
采用上述特征描述方法描述红外舰船目标特征时,由于对目标在多尺度下的特征表达不够完整,导致图像中同时存在多个大小不同的目标时,检测结果容易出现较大偏差.且上述计算量较大,不适用于对实时性要求较高的场合.
基于对红外舰船目标特性的分析,提出一种改进的斑点检测方法.该方法基于多分辨率差分滤波进行舰船目标检测,且无需大量预先样本图像.可以在保持检测准确率的前提下对高斯差分算子检测方法的计算进行简化.该方法避免了反复进行高斯滤波运算,从而简化位置选择计算过程.同时,因为在每个分辨率下只作单尺度差分滤波,所以能降低尺度选择计算量.
1 问题的提出
红外图像中舰船目标的灰度一般与背景有较大差距.但是由于舰船目标自身的灰度不均匀和图像中海洋背景的噪点干扰,基于角点特征的检测方法很难准确检测海洋背景下的红外舰船目标.而利用斑点特征可以有效地进行红外目标检测.
红外图像斑点是指图像中与周围区域在灰度上有较大差异的区域.斑点区域内部的灰度差异不会影响斑点检测结果.同时,斑点区域也不容易被周围图像噪点干扰.因此,利用斑点特征可以有效地进行红外目标检测.本文重点研究利用差分滤波原理进行红外舰船目标检测.
2 检测方法
2.1 基本检测方法
人工设计检测器时一般采用实验的方式寻找目标的特征,再针对目标特征设计检测器的图像处理模块、检测流程和相关参数.基本检测方法是对输入图像在多个分辨率下作差分滤波,取每个像素的多分辨率差分滤波结果最大值作为滤波结果.计算滤波结果在目标候选区上的平均灰度.选取平均灰度大于设定阈值的目标候选区作为红外舰船目标检测结果.
2.1.1 多分辨率差分滤波
1)差分滤波:差分滤波主要用来检测图像中的斑点,即图像中与周围有灰度差异的区域.这些斑点可能就是红外舰船目标区域.本文方法进行斑点检测的基本思路是对输入图像分别进行平滑滤波和均值滤波,再将两个滤波结果作差分.


图1 多分辨率差分滤波原理图
其中,−r≤u≤r,−r≤v≤r.

由式(1)可见,σ 是式(1)中直接影响滤波结果的参数.因为距离滤波器模板中心越远的像素权重越低,经过卷积滤波后对结果影响越小.而σ 的大小决定了滤波器模板中权重分配.由式(1)可知,距离滤波器模板中心超过3σ 的像素对滤波结果的影响可以忽略不计.因此,滤波器对等效半径为3σ 的斑点检测效果最佳.计算可得,滤波器最佳检测面积为π(3σ)2.
为了使不同大小的红外舰船目标都能被正确检测,需要用不同大小的σ 作为滤波器参数分别对图像作处理.而在滤波器σ 不变的情况下,改变被处理图像的分辨率能够达到与改变σ 相同的效果.因此,采用多分辨率滤波的方式进行处理,可以保证各种尺寸的目标都能被正确有效检测出来.
提出的多分辨率差分滤波方法原理如图1所示.对输入图像及其降采样图像分别求取差分结果.取4个分辨率下的差分结果最大值作为最终的滤波结果.
2)图像金字塔:图像金字塔是一系列分辨率逐步降低的图像以金字塔形状排列组成的集合,是一种有效的图像多分辨率处理方式.
图像金字塔的最下一层是高分辨率的待处理图像.随着金字塔的层数升高,相应层的图像尺寸和分辨率都依次降低.
2.1.2 选择性搜索算法
采用选择性搜索算法生成初始候选区.选择性搜索算法首先用图像分割方法生成初始分割区域.然后通过相似度计算将初始分割的小区域合并,进而得到数量较少而包含目标可能性更高的候选区.
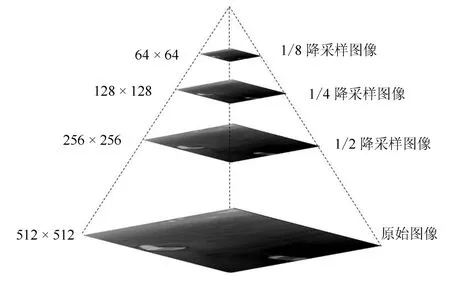
图2 图像金字塔
2.1.3 选择性搜索与差分滤波的融合
对选择性搜索结果与差分滤波结果的融合算法是:计算差分滤波结果图中目标候选区内的图像平均灰度,保留平均灰度大于设定阈值的候选区,作为目标检测结果.
为了加快平均灰度计算速度,采用积分图方法.
对灰度图像来说,任一点A(x,y)的积分图表示图像左上角到该点所围成区域内所有点的灰度总和.
图3中A点的积分图为

其中,G(x,y)表示点A(x,y)的积分图,i(x′,y′)表示点(x′,y′)的灰度值.

图3 积分图
区域D的积分图求法如下:

其中,G(e)、G(f)、G(g)、G(h)分别表示e、f、g、h各点的积分图.如图4所示.
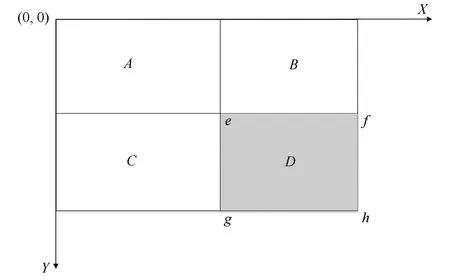
图4 区域积分图
2.2 具体检测方法
本文检测算法总体流程如图5所示.对输入图像分别用选择性搜索算法和多分辨率差分滤波的方法作处理.再将两种方法生成的红外舰船目标候选区进行融合,得到最终检测结果.

图5 目标检测流程图
3 实验结果与分析
3.1 实验结果
3.1.1 实验图像的采集与选取
实验中,用无人机挂载的长波红外摄像机拍摄红外视频.再将视频转存至图像处理计算机.每帧图像尺寸均为530×639 像素.
选取其中139 张图像组成测试图像数据集.测试数据集图像中包含从不同角度拍摄的各型舰船.测试数据集中图像背景均为海洋背景.图6为测试图像数据集中3 幅示例图像.
利用MATLAB 中目标标注程序手工标注图像中舰船目标,得到舰船目标样本图像和目标位置,为计算目标检测准确率作准备.图7为部分目标示例.
3.1.2 实验方法的选择
实验所用图像数据集中,舰船目标的灰度与周围背景有较大差异.
如图8所示,从原图像的三维分析中可以更直观地看出,舰船目标的灰度级明显高于周围背景.另外,从原图和三维分析图可以看出,噪声干扰比较少.因此,可以采用构建多分辨率高斯金字塔进行差分滤波的方法进行目标检测.同时,为了提高检测准确率,对原图像进行选择性搜索,得到目标候选区.将这些候选区同多分辨率差分滤波的结果进行融合,得到最终检测结果.
作为多分辨率差分滤波检测方法的对比实验,采用提取方向梯度直方图(Histogram of Oriented Gradient,HOG)特征进行支持向量机(Support Vector Machine,SVM)分类的检测方法对相同的测试图像作目标检测实验.
3.1.3 多分辨率差分滤波目标检测实验
在搭载Intel (R)Core (TM)i7-6700 K CPU 4.00 GHz 处理器,32 G 内存的PC 机上使用MATLAB R2014a 进行实验.后续检测实验均在此硬件实验环境下进行.
用多分辨率差分滤波的方法对输入图像进行处理.如图9和图10所示.其中,构建高斯图像金字塔所用高斯滤波器采用9×9 的卷积核,方差σ 设为1.6,高斯金字塔层数为4,平滑滤波器采用9×9 的均值滤波卷积核.
经过多分辨率差分滤波后得到目标区域大致轮廓.为了进一步降低噪声干扰,再用高斯平滑滤波器进行滤波,以便下一步处理.

图6 测试图像数据集示例
图7 数据集样本示例
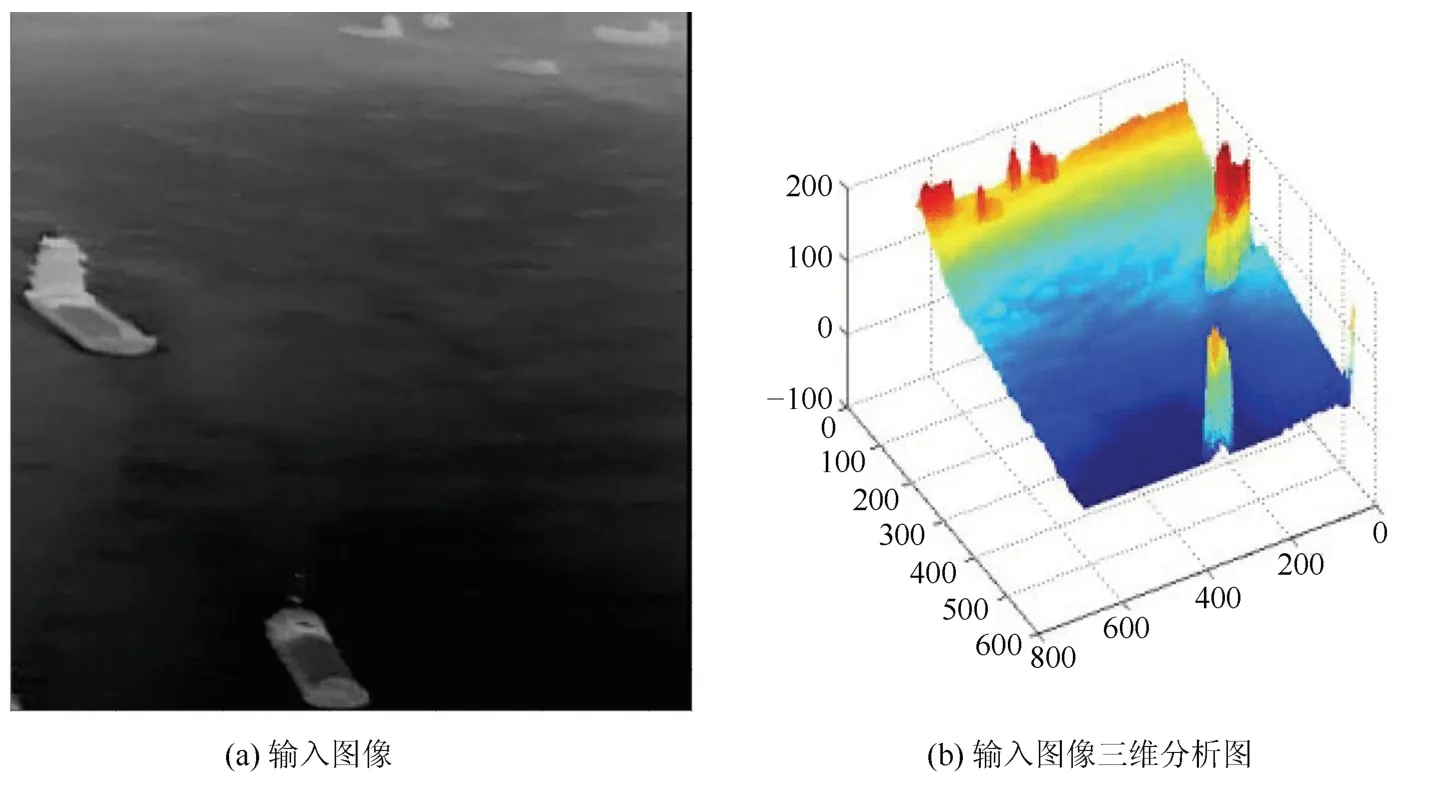
图8 测试图像及其三维分析图

图9 输入图像及其三维分析图
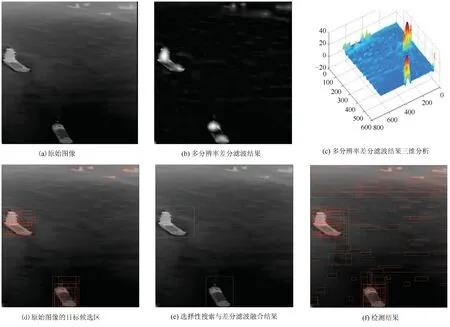
图10 多分辨率差分滤波检测
用选择性搜索算法提取输入图像的目标候选区.在平滑后的差分滤波图中计算所有候选区的平均灰度.当候选区内图像平均灰度大于阈值时,判定此候选区为目标区.当候选区内图像平均灰度小于阈值时,判定此区域为背景.框选出目标区,得到最终检测结果.
3.1.4 对比实验检测结果
作为对比实验,在相同实验环境下,对相同的输入图像采用HOG 特征加SVM 分类的方法进行目标检测实验.
相对于HOG 结合SVM 检测方法,多分辨率差分滤波检测方法对本文测试图像的检测准确率更高.如图11所示,HOG 结合SVM 检测方法两次出现误检测现象,将多个目标误检测为单个目标.而多分辨率差分滤波检测方法准确检测出了图像中的所有舰船目标.
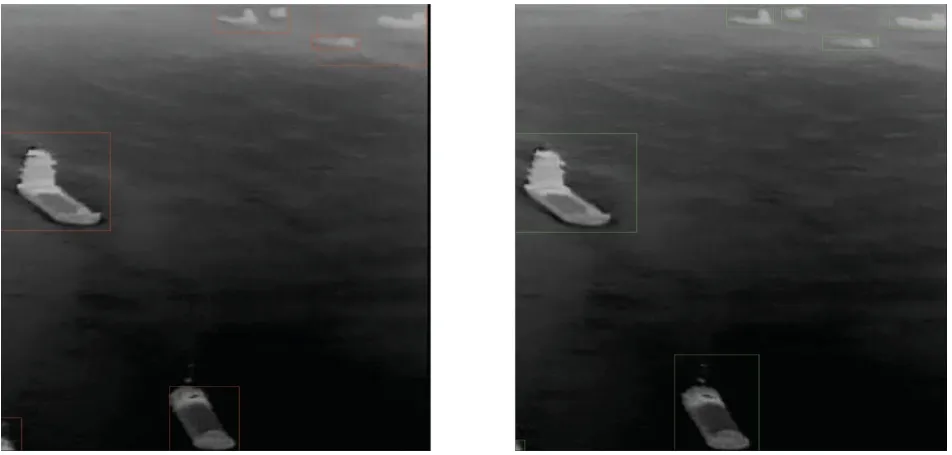
图11 多分辨率差分滤波检测结果与HOG+SVM 检测结果对比
对测试图像数据集中前130 幅图像进行二对折交叉验证,得到HOG 结合SVM 检测方法检测准确率.再对相同的130 幅图像分别作多分辨率差分滤波检测,计算平均检测准确率.如表1所示,多分辨率差分滤波检测方法的平均检测准确率比HOG 结合SVM 方法的平均检测准确率更高.

表1 两种检测方法的平均检测准确率
3.2 实验分析
1)实验结果表明,多分辨率差分滤波检测方法对于本文红外舰船目标的检测效果较好.由于多分辨率差分滤波处理能够将目标与背景的灰度差异拉大,使得目标更容易被检测出来.
从图12(a)中可以看出,对于方框标出的1 ~4号目标,由于其距离拍摄镜头较远,所以在原图中较小,且与背景差异不大,难于被检测出来.经过本文方法处理后,1 ~4 号目标与背景的灰度差异被拉大.由图12(b)、图12(c)可以看出,1 ~4 号目标的灰度均高于背景及噪声干扰,在三维图中形成了突出于背景的尖峰,从而更容易被检测出来.从图12(d)可以看出5 号目标经过本文检测方法处理后在灰度上与背景差异非常明显,能够被检测器成功检测.
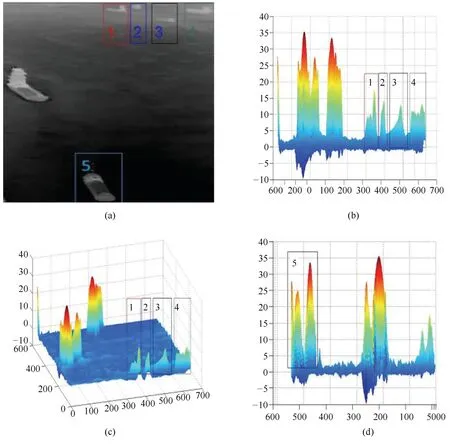
图12 多分辨率差分滤波结果三维分析
2)对实验结果分析表明,被检测目标尺寸与差分滤波器最佳滤波半径3σ(σ 为高斯低通滤波器标准差)越接近,越容易被成功检测出来.
由图13可见,对于同一张原始图像中相同的目标,采用不同的σ 进行差分滤波所得结果有很大不同.σ 取16 时,图像中尺度较小的目标滤波响应值低.最终检测结果也显示,尺度较小的目标没有被正确检测.σ 取2 时,图像中尺度较小的舰船目标滤波响应值明显高于σ 取16 时的响应值.最终检测结果也显示,尺度较小的目标能够被正确检测.
原图像中6 艘舰船尺寸如表2所示.

表2 图像中舰船目标尺寸
σ = 16 时,滤波结果中舰船目标呈模糊的块状亮斑.此时,滤波器最佳检测面积为7 238.由表2可知,1 号和2 号目标的等效面积与滤波器最佳检测面积最接近,所以滤波结果灰度级最高.而其他目标的等效面积与滤波器最佳检测面积相差较大,所以滤波结果的灰度级低,在滤波结果图像中表现为与背景相似的灰暗斑块.相应的检测结果中,等效面积与滤波器最佳检测面积相差最大的5 号和6 号目标没有被正确检测出来.
σ = 2 时,滤波结果中舰船目标的边缘被突出显示出来.此时,滤波器最佳检测面积为113.5 号和6号目标的等效面积与滤波器最佳检测面积相差较小,而其他目标的等效面积与滤波器最佳检测面积相差较大.相应的检测结果中,等效面积与滤波器最佳检测面积相差最小的5 号和6 号目标都能被正确检测出来.
由上述分析可得,改变σ 取值,使滤波器最佳检测面积π(3σ)2与被检目标等效面积越接近,目标被成功检测的可能性就越高.
3)由实验结果可见,在阈值为5,高斯低通滤波器卷积模板尺寸为9×9,标准差为1.6 时,多分辨率差分滤波检测算法针对本实验图像数据集的平均检测准确率达到最高,达到89.378%.本文方法对互相重叠的多个目标均误检测为一个目标.这是造成检测准确率下降的根本原因.多个目标互相重叠时,本文检测方法无法准确得到带有多个尖峰的滤波结果,这导致将这些目标误检为一个目标.

图13 差分滤波结果对比图
4 结论
由实验结果可见,多分辨率差分滤波检测方法可以对海洋背景中的红外舰船目标进行有效检测.在同样实验条件下,针对本文图像数据集,多分辨率差分滤波检测方法比使用HOG 结合SVM 的检测方法平均检测准确率高,平均检测准确率达到89.378%.将多分辨率差分滤波与选择性搜索结合的方法能够将目标的灰度、纹理、大小和形状等特征综合利用,进而提高检测准确率.
本文方法不能准确检测互相重叠的多个目标,这是本方法在未来需要进一步研究改进的方向.
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
舰船科学技术(2022年11期)2022-07-15
上海师范大学学报·自然科学版(2022年3期)2022-07-11
北京航空航天大学学报(2022年6期)2022-07-02
舰船科学技术(2022年10期)2022-06-17
集装箱化(2021年1期)2021-04-12
舰船科学技术(2021年12期)2021-03-29
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
中国信息技术教育(2020年2期)2020-02-02
上海师范大学学报·自然科学版(2018年3期)2018-05-14