
引航员软梯ISO 799标准修订要点分析
2020-07-02 01:34中国船级社刘海燕
中国船检 2020年6期
中国船级社 刘海燕
近年来,引航员软梯登乘事故频发,其构造、使用是否满足要求这个问题在港口国检验中越来越被关注。国际海事组织(IMO)A.1045(27)决议提及了引航员软梯位置及构造,产品本身绑扎细节没有具体表述。在MSC 308(88)决议中将产品具体要求指向了ISO 799标准。ISO 799标准在2019年进行了修订,并于2019年2月26日生效。相对于2004版ISO 799标准,2019版有了较多的变化。本文从检验时比较关注或理解模糊的几点进行分析、比较。
绑扎方式
目前,引水员软梯常见的绑扎方式是边索两端终止于踏板底部,即接头捻合位置布置在引水员软梯底端,如图1所示。近年来也出现了新的绑扎方式,即接头捻合位置布置在引水员软梯顶端,相对于前者边索的穿越踏板方向是反向的,如图2所示。这种型式在2004版里并没有描述,因此在检查时,对此有一定的疑义。

1、两种型式比较
在ISO799-2019中,对引航员软梯绑扎型式做了较为明确的说明,相对于2004版本,在新修订的标准中明确提出了两种绑扎方式,一种是边索捻合位置在尾部,一种是边索捻合位置在顶部,即包含上述两种绑扎方式,如图3所示。图中红圈位置为两种方式绑扎不同之处。第一列为接头在顶部捻合固定(即图2型式),第二列为接头在底部的捻合固定(即图1型式)
这里需要指出的是,图2中顶部绳索的捻合方式有点问题,按照ISO 799图示要求应是根绳索两个端部捻合成一根与套环相连,而不是分成两根,若单根套环使用固定,强度无法保证。另外,两种绑扎方式应注意踏板底部边索的处理,若边索捻合段在顶部,底部应当通过嵌固件穿越;若边索捻合段在底部,应当设置两道扎绳,间距60mm,下端尽可能短,避免较长的端部缠绕发生事故。
2、两种型式选择
以前,产品基本都是图1型式,现在有个别船东选择图2型式。经了解,欧美船东偏向于图2型式,原因是引水员软梯长久使用后捻合的接头容易松散,若接头在顶部,便于发现(在甲板上可以看到),在底部就不便察觉。所以现在有些船东在订货时就要求工厂将捻合接头布置在顶部。从这个角度考虑,图2型式确有其优点,使用时便于及早发现缺陷,避免事故的发生。

图1 接头在底部

图2 接头在顶部
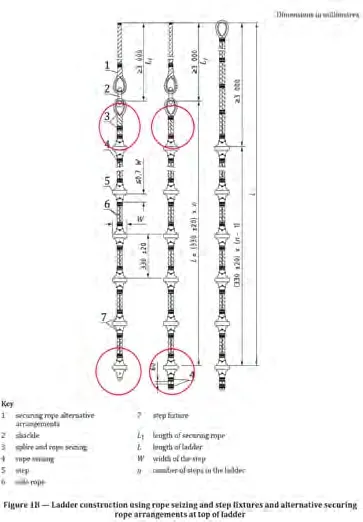
图3 引航员软梯结构型式
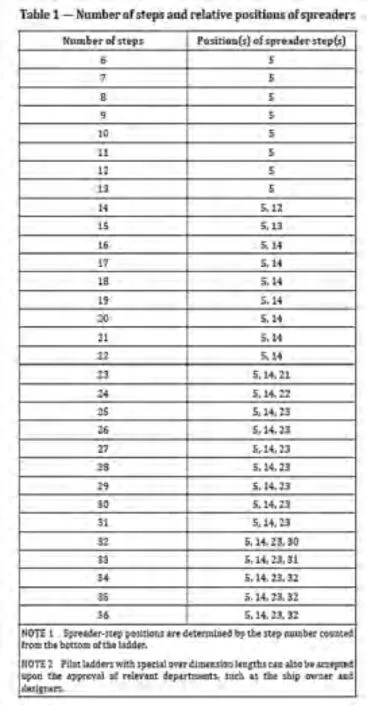
图4 止扭板布置(2019版)
结构型式
对于引航员软梯的结构型式,之前有几处疑义,一是引航员软梯长度最大长度能否超过9.9m;二是若长度许可,超过30级踏板的引航员软梯,9m以上部分止扭踏板如何布置;三是引航员软梯使用能否通过卸扣连接。
1、绳梯长度及止扭踏板的布置
目前,常见的引航员软梯长度多为9.9m(30级,按330mm间距算,共计9.9m长),2004版标准对超过该长度的引航员软梯结构型式没有明确说明,MSC.1Circ.1428要求引航员软梯攀爬高度不能超过9m(超过9m需结合铝质舷梯登乘)。这也容易对引航员软梯最大长度产生误解,误认为引航员软梯长度不可超过9m。但随着船舶大型化,甲板距吃水线高度远超9m。另外对于超过9m以上位置止扭板的布置在2004标准中并没有说明。

图5 引航员软梯/舷梯组合使用

图6 卸扣连接方式(ISO 799-2019)

ISO799-2004条款截图

MSC.1/Circ.1428截图
对于最大长度,虽然引航员软梯攀爬最大高度不能超过9m,但这并不意味着绳梯本身长度不能超过9m。另外,标准要求每副5级踏板以上的引水员软梯应设有一块或一块以上的止扭踏板,2004版中止扭板的布置标识到30级,该规格以上的并未做说明。在ISO 799标准新版中对上述问题做了进一步说明,止扭板布置已明确到36级绳梯(如图4所示),并对梯子超过该长度的梯子做了表述(图4表下方表述NOTE2 Pilot ladders with special over dimension lengths can also be accepted upon the approval of relevant departments,such as the ship owner and designers.)。
2、卸扣的使用
鉴于引航员软梯过短(如前所述),目前不少船通过辅助绳、卸扣连接的方式来延长引航员软梯,如图5所示。
这种方式也引起一些疑义,某船在国外锚地引航员登乘时,曾对此方式产生质疑,认为引航员软梯不应通过卸扣连接。ISO 799-2004,及MSC相关决议有“从软梯的顶部到底部应为整根绳索,中间不应设有卸扣连接”的说法,如下:
经查阅相关决议案,文中对引航员软梯延伸绑扎固定情况下卸扣的使用没有具体条文澄清,2004版ISO 799标准里有模糊表述,没有图示明确方式。在ISO 799-2019修订版上有了具体说明,如图6所示的连接方式。
在IMO A1045(27)中,图示中间不能有“shackle,knots or splices”,个人理解应该是指引水员软梯边索中间不应有打结或拼接(仅指引水员梯产品本身中间不可打结、拼接),但考虑引水员软梯长度不够,通过卸扣、索套、辅助绳按照ISO 799延长布置,这种型式应该可以被接受,前提是卸扣破断负荷大于绳索破断负荷、卸扣通过扣环连接。
3、绑扎件种类
ISO 799-2004版中对踏板的固定有两种型式,一种是嵌固件绑扎,还有一种机械夹箍,如图7所示。

图7 机械夹箍(左)和扎绳及踏板嵌固件(右)的梯结构选择方案

图8 机械夹箍

图9 嵌固件绑扎
但在新修订的2019标准中该图已经没有了,对固定件有如下描述:Step fixtures for securing each step of a ladder shall have rope seizing or purpose made arrangement such as solid nylon clamp blocks or hardwood clamp blocks to prevent the fasteners from loosening.Cable ties,u-clamps,worm driven clips are unacceptable.
按照新修订标准的表述来看,业界人士认为2019版本已不接受机械夹箍型式,引航员软梯只能用嵌固件绑扎方式,原因是机械夹箍导致船员在船上无法自行更换破损的踏板。但也有工厂反映,有些船东指定要求机械夹箍,原因是机械夹箍比嵌固件手工绑扎更牢靠。
从标准发布来看,2019版标准已于2019年2月26日生效,但2004版标准官方并未明确作出废止,且目前满足新旧标准的引航员软梯都在使用,使用机械卡箍固定方式的引航员软梯是否可以并行一段时间,需要官方进一步的调研与澄清。综上,引航员软梯制造标准ISO 799新版的修订,对2004版标准中有疑义的地方进行了进一步的说明,并引入了一些新的内容。这些内容的变化有助于我们对引航员软梯制造、使用要求更进一步理解,对平时检验中存在的疑虑及港口国检查提出的问题也能很好的解释及应对。
康士伯签署第一份水下创新技术合同
2020年6月5日,康士伯海事签署了第一份为无人驾驶船舶而专门设计的,先进水下机器人(ROV)布放回收系统(LARS)合同。合同签署方为Ocean Infinity公司,该系统将应用于其高端的Armada船队上。
康士伯 LARS系统是确保在进行水下作业时无需人员出海的重要组成部分。这一创新技术使基于岸上的团队能够实现对水下机器人和水下自主航行器的远程操控。
该系统采用纯电力驱动系统,更具环保可持续性,并显著减少维护的需求。布放和回收将通过月池进行,ROV的布放和回收在海面之下完成。这消除了与船体碰撞对ROV造成损坏的可能性。该系统的另外一个益处是,布放和回收可以在较高海况下得以进行。“新的 LARS 解决方案是康士伯与Ocean Infinity团队密切合作开发的。它得益于我们先进的海底技术,并辅之以多年积累的海工专业知识。” 康士伯海事甲板机械和姿态控制执行副总裁 Lisa Edvardsen Haugan说。“我们相信,该系统的使用将大大提高远程操控船舶的安全性。我们期望看到更多的公司转向使用无人驾驶船舶,从而降低运营成本和提高安全性。”
猜你喜欢
珠江水运(2022年8期)2022-05-12
珠江水运(2021年21期)2021-11-25
珠江水运(2021年14期)2021-08-17
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
价值工程(2017年36期)2017-12-01
计算机教育(2017年9期)2017-09-28
科技创新导报(2017年19期)2017-09-13
读写算·素质教育论坛(2017年16期)2017-08-04
教育界·下旬(2016年4期)2016-11-19
