
基于51 单片机的环湖植树智能小车的设计
2020-06-22 08:35河北农业大学赵一州常悦张德林
河北农机 2020年5期
河北农业大学 赵一州 常悦 张德林
关键字:51 单片机;颜色传感器;环湖植树;循迹避障;智慧农业
1 设计要求
本小车的设计功能是实现“环湖种树”:该小车能够沿规定围墙外侧行驶,在指定位置捡取目标物“树木”,“树木”分为蓝色与绿色两种,运输到“种树”区域,区域中存在蓝色与绿色两种,对应颜色“树木”需种入对应颜色“树坑”中,成功完成全部“种树”任务后,机器人继续沿围墙行驶至起点为完成全部任务。全过程靠小车自行完成,无人工干预。(注:树苗和树坑颜色的识别只需识别地面颜色即可,在树苗存放处有挡板标识物,在树坑处无标识物。各颜色树苗存放处均有两棵树,每个树坑只允许放一棵树苗。)

图1 小车行驶路线图
2 整体设计思路
小车要满足设计要求,需从“环湖”和“植树”两处考虑。环湖可以以循迹和避障相结合的方式入手;植树需要传感器来检测和识别树木,用机械臂来完成拾取动作;小车整体结构,需结合实际情况而定。具体如下图:

图2 基于51 单片机的环湖植树智能小车的设计
3 整体构造
小车的主体构造为车板、分有左右两室的车厢、两个直流减速电机驱动两个车轮作为前轮(驱动轮)、后轮是一个万向轮(从动轮)、AT89C52 单片机控制模块、L298N 电机驱动板模块、5V和12V 直流电源模块、电源压降模块、传感器模块、机械臂模块。
4 功能实现与原理
4.1 整体原理
该小车基于AT89C52 单片机,通过L298N 电机驱动板模块控制两个直流减速电机的正反转向来实现小车的前进倒退以及转弯。在车体侧前方和靠近湖泊侧方装有红外传感器,在车的底部装有光电开关和颜色传感器。车体前方和侧方的红外传感器保证小车在与挡板保持一定距离的情况下前进和转弯。在小车进行环湖绕行时,当小车底部的光电开关和颜色传感器协同检测识别树苗标识物时,将产生的信号发送给单片机,单片机控制小车停止的同时向舵机发送信号,由舵机控制机械臂进行树苗的夹取,并放入车厢相应的分室内。小车继续前行检测到相应的树坑,舵机控制机械臂将树苗从相应分室取出放置到坑位中。
4.2 小车“环湖”行走功能实现与原理
该车由红外传感器传给单片机信号[1],单片机控制L298N 电机驱动板模块进而控制两个直流减速电机的正反转来实现小车的前进倒退以及转弯。电机和传感器均用5V 电池供电。将靠近湖泊(即围墙,下文皆用围墙代替)侧方装的红外传感器定义为1号传感器,侧前方的定义为2 号传感器,二者尾部相靠,1 号与车体水平,2 号与1 号呈45 度夹角指向侧前方。1 号传感器灵敏度调为10 厘米,2 号为5 厘米。
状态一:当1 号检测到围墙而2 号没有时,说明小车与围墙距离在5 到10 厘米内,距离合适,两车轮均向前转,小车直行;
状态二:当两个传感器都有检测信号传给单片机时,说明小车与围墙距离已小于5 厘米,此时单片机控制靠近围墙一侧车轮向前转,远离一侧的向后转,从而使小车向远离围墙一侧转弯,直到恢复到状态一为止;
状态三:当两传感器均未检测到围墙时,说明小车离围墙距离大于10 厘米,此时近侧车轮向后转,另一侧的向前转,使得小车向围墙一侧转弯行驶,直到恢复到状态一为止。
以上三种状态保证了小车一直与围墙保持在5 到10 厘米的距离行驶,从而实现“环湖”行驶。
4.3 小车“植树”功能实现与原理
该小车底部装有光电开关和颜色传感器,二者协同检测识别“树苗”和相应颜色的树坑,其中颜色传感器朝下,光电开关朝向侧面;车后面有两室的车厢,分别装载蓝色和绿色树苗;车顶装有机械臂,负责将树苗拾取到相应的车厢分室内以及从分室内取出树苗放到相应的树坑中。其具体动作如下:
在颜色传感器检测到地面颜色时,小车停下,如果光电开关也检测到侧面的挡板标识物,说明小车来到相应颜色的树苗存放区,则机械臂执行拾取动作,夹取地面上的两棵树苗,当颜色传感器检测到蓝色,机械臂将树苗放到左侧分室;若检测到绿色,则放到右侧分室。完成动作后小车继续前行。
在颜色传感器检测到地面颜色而光电开关未检测到标识物时,说明小车来到树坑处。若传感器检测到蓝色地面,机械臂从左侧分室夹取树苗并放入树坑;若为绿色,则从右面夹取并放入树坑。完成动作后,小车继续前行。
上述动作使小车完成植树。其中,传感器和机械臂具体结构原理如下:
(1)颜色传感器部分:由三原色原理可知,如果知道构成各种颜色的三原色值,就能够知道检测物的颜色。单片机控制颜色传感器内红色滤波器、绿色滤波器、蓝色滤波器的工作状态,由颜色传感器输出脉冲信号给单片机,得到检测物的RBG 值[3]。
(2)机械臂部分:如下图所示,该机械臂由三个舵机和机械爪以及舵机支架组成,自上而下分别为,一号、二号、三号舵机。一号舵机控制机械臂在水平面内转向移动,二号舵机控制机械臂在竖直面内运动,三号舵机控制机械爪的张开与闭合。
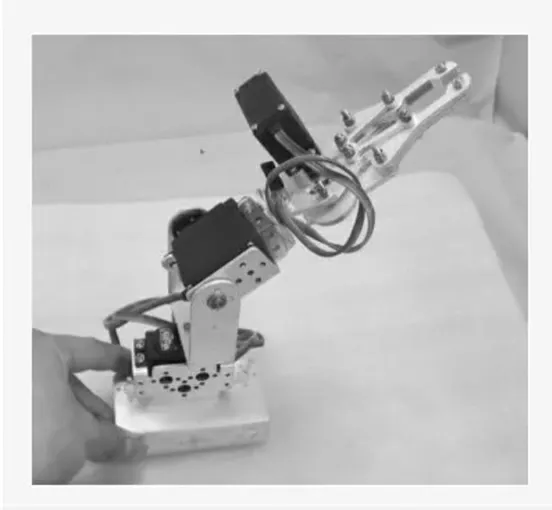
图3 三舵机机械臂
5 实现情况与存在问题
该小车的设计满足设计要求,经实验,该小车可以顺利完成所有工作。不过这是在光线适当且均匀的室内,遮光工作比较到位的前提下。如若有强光干扰或者小车在室外运行,小车存在光线干扰的问题,无法顺利完成相应动作。对此,可用超声波传感器替换红外传感器,以解决光线干扰问题。
6 结语
在当今社会发展智慧农业的背景下,该设计在满足设计要求的同时,也对现代农业机械,尤其是植树机械有一定的参考价值和启迪意义。但是,该小车目前只是一个智能小车,距现实中的环湖植树还有很大差距。不过我们会继续研发,愿为我国农业机械的发展以及智慧农业发展做出贡献。
猜你喜欢
云南农业(2020年3期)2020-04-28
润·文摘(2020年1期)2020-02-11
中外管理(2020年9期)2020-01-08
科技风(2019年2期)2019-10-21
电子制作(2018年1期)2018-04-04
绿色科技(2016年4期)2016-10-21
中国科技教育(2016年6期)2016-08-27
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
舰船科学技术(2015年8期)2015-02-27
