
大蒜定向种植扶正入土装置
2020-06-22 08:35河北农业大学赵一州张寅马攀
河北农机 2020年5期
河北农业大学 赵一州 张寅 马攀
1 研制背景及意义
大蒜具有丰富的营养成分,独特的口感,具有杀菌、抑菌等医疗保健功能,因此大蒜越来越受到世界各国人民的喜爱,市场需求也在不断增加,种植面积呈逐年上升趋势[1]。然而,我国的大蒜生产主要依靠人工劳动,不利于农业现代化和新农业的发展。为此,我国研制了适应大蒜生产需要的机械设备和工具,实现了大蒜产业化生产,满足了大蒜种植者的需求,提高了大蒜机械化生产水平,形成大蒜种植、地膜覆盖、收获等关键技术产业链[2]。
根据农艺学要求,蒜瓣背面靠紧沟壁,蒜瓣必须直立种植,且芽部朝上根部朝下。该播种方法有利于大蒜的生长发育,达到提高大蒜品质和增产的目的。
而目前的全自动大蒜栽种技术采用特定机件扶正蒜瓣、振动抖槽定向器等装置,基本上解决了大蒜朝向问题[3]。但是由于大蒜在入土阶段,靠其自身重力从出口落到开好的沟槽中,由于土壤等因素,会使蒜瓣在跌落土中后再次歪倒。
本装置是为解决已经定向的蒜瓣在投穴过程中,直立度由于受土壤类型、土壤含水率、土穴形状、导种管下口与土穴的距离等因素的影响,而在跌落土中后再次歪倒的问题而设计。
2 主要结构
本设计包括推送装置,夹持装置以及感应装置。
推送装置主要用来推动机械管夹,使其可以上下移动,方便将夹住的蒜瓣放入已打好的洞中,推送装置主要是以发电机带动齿轮转动,使得其可以上下移动。
夹持装置主要用来夹通过定向器传送下来的蒜瓣,管夹采用耐磨、耐腐蚀金属,内置有优质海绵,以防止对蒜瓣造成伤害,管夹内壁装有感应装置,当感应到蒜瓣时,管夹会自动夹紧,然后由推送装置推动管夹,将蒜瓣放入洞中。
感应装置分为两个,第一个就是上面所述装在管夹内壁,用来感应蒜瓣;第二个则是装在管夹底端,在管夹伸入洞中的过程中,这个感应装置会感应其深度,到达底部通过感应装置使管夹松开,推动装置带动管夹上移,回到最初位置。
装置结构如下图:
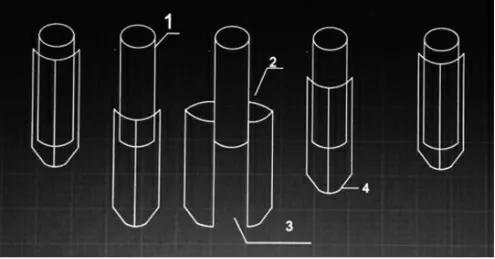
图1 自动扶正夹管结构示意图
3 工作原理
(1)本装置是安装在现有装置(图2)的下种管种子出口处的一个可以上下伸缩的管夹(管夹结构见图1),当已处于正向的蒜瓣经过出口时,会被本装置夹住(内置有优质海绵,不会对蒜瓣造成损伤),随后管夹向下移动,直至将蒜瓣送至与土壤接触时,管夹松开,上升至原位,等待接送下一个蒜瓣。(即一个在排种口与地面间的接送装置,利用该装置将蒜瓣放在土穴里,而不是蒜瓣自己跌落到土穴里,这样就减少了蒜瓣在最后入土阶段方向的不确定性)。
(2)下面部件侧面为齿状,当检测到大蒜已经落到土壤中便会及时回收,在齿的缝隙中先漏进一部分土壤埋在大蒜底部,随着机构回缩,土壤依次从下到上覆土,确保大蒜直立在土壤中。
(3)该装置会根据具体情况而上下移动。
(4)与现有装置结合:本装置安装在图2 的4 处。以拖拉机作为动力,通过把手和牵引杆把动力传到播种盘上;播种盘转动,播种盘上的压穴锥压出圆锥形的种穴,同时凸轮转动,带动挡板向右移动,排种管和下种管连通, 蒜种由播种箱落下,经过排种管,落到下种管中,被管夹装置夹住,之后管夹会被拖拉机的运动而带动进行上下移动,当夹子下落到与穴底土壤接触的时候松开将蒜瓣放在穴内,随后管夹上升。播种盘继续带动凸轮转动,挡板在凸轮推程过程中向左移动,阻断播种管和下种管的连接;同时覆土板对落下的蒜种进行覆土,此为一次播种过程;管夹继续在动力带动下上下移动进行下一次播种,实现播种的连续作业,如此往复。

图2
4 存在问题及解决方案
由于该装置是直接与土壤接触的,管夹在上下移动过程中,有部分土壤会卡到伸缩部位的缝隙中,从而造成磨损和卡滞。对此提出两种解决方法:
一是在伸缩部位侧面加上毛刷装置,刷掉所附着的土壤;
二是故意增大伸缩接合部位的径向缝隙,使得卡在缝隙中的土壤由于管夹的震动和土壤的自重而掉落,此外,大缝隙也有减小由于热胀冷缩等原因所造成的挤压与摩擦。
5 创新点及应用
在已成型的定向种植机存在一个入土时大蒜瓣芽尖朝向又会变化的问题,本装置是安装在已有机器的蒜瓣下种管出口处的机械管夹,直接把蒜送入土中。该装置会根据具体情况而上下移动。
下面部件侧面为齿状,当检测到大蒜已经落到土壤中时及时回收,在齿的缝隙中先漏进一部分土壤埋在大蒜底部,随着机构回缩,土壤依次从下到上覆土,确保大蒜直立在土壤中。
解决了一些小型、实用型大蒜定向播种机在投穴过程中蒜瓣芽尖朝向的随机性问题,提高定向大蒜播种机的精度。
6 结语
该装置的研究,解决了已经扶正定向的蒜瓣在入土过程中,受重力、土壤等因素的影响,使得蒜瓣再次倾斜的问题。使蒜瓣定向种植机械定向效率更高,为大蒜种植机械体系的完善提供了参考。
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22
边疆文学(2020年5期)2020-11-12
VOGUE服饰与美容(2019年6期)2019-07-17
创新作文(5-6年级)(2017年9期)2018-07-06
创新作文(5-6年级)(2017年8期)2018-07-06
养生保健指南(2018年3期)2018-04-13
课堂内外(小学版)(2016年12期)2017-01-11
制导与引信(2016年3期)2016-03-20
