无人机与GPS-RTK 相结合的河道断面测量方法
2020-06-21 11:50:06杨朝辉伍尚荣陈国栋
苏州科技大学学报(自然科学版) 2020年2期
杨朝辉,伍尚荣,陈国栋
(苏州科技大学 环境科学与工程学院,江苏 苏州215009)
全面推行河长制是推进生态文明建设的重要措施之一,是维护河库生态健康的有效举措,也是保障水安全的制度创新。作为河长制的重要抓手,“一河一策”编制工作在全国各地受到广泛重视[1]。其中,方案编制的核心就是通过调查摸清河道现状,并据此编制有针对性的保护方案[2]。目前,河道调查主要采用人工调查的方式,通常采用经纬仪、水准仪和全站仪等仪器进行测量。这种人工调查方式所耗人力物力较多、周期长、覆盖范围小、测量过程繁琐。而且受河流地形因素的限制,调查过程中传统测量仪器的视野范围很容易受到树木遮挡的影响。针对这种情况,GPS 开始逐渐应用到河流测量与调查中。使用GPS 可以根据河流实际地形合理布设控制网,通过测量控制点坐标,并对其进行内插处理,最终得到断面图。但是这种单纯GPS 的测量效率仍比较低下,对控制点数量的要求较高,很难完成大范围的河道测量与调查。
近年来,无人机(Unmanned Aerial Vehicle,简称UAV)技术发展迅猛。该技术可以同时获取作业拍摄区域的几何信息和影像信息,具有机动灵活、高效精细、快速准确、作业成本低、覆盖范围大、生产周期短等优点。目前无人机技术已开始应用于灾害处理、国土监察、资源开发、小城镇建设等方面,尤其在生态保护、河流阶地提取、河流岸线资源监管等领域得到了广泛的应用[3-6]。笔者将无人机与GPS-RTK 引入河道断面测量,实现河道断面的自动绘制,最终满足河道调查的相关需求。
1 河流断面测量方法
1.1 主要流程
河道测量的一个主要内容就是河道断面测量,通常是指横断面测量。河槽中垂直于水流的断面即为该处河道的横断面[7]。该研究引入无人机与GPS-RTK 技术,使用无人机外业采集河道现场影像,采用GPSRTK 获取控制点及河流深度等信息。在此基础上,利用无人机摄影测量技术构建河流DEM 模型和DOM 模型,最终实现河道断面图的自动绘制。该方法主要流程图如图1 所示。
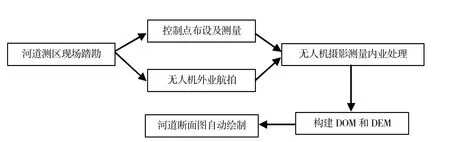
图1 河道断面测量方法主要流程
河道断面测量方法的详细流程:
(1)获取河道所在测区的基本信息。对河道进行现场踏勘,设计无人机飞行的航带。
(2)控制点布设及测量。大部分河道两侧多为林地或农田,很难找到固定的像控点。该研究定制了20 块50 cm×50 cm 打印有黑白色块的硬纸板作为控制点,均匀布设在整个测区内,利用铁钉固定,并使用GPS-RTK 方式测量控制点中心位置,得到高精度的控制点坐标数据。
(3)无人机外业航拍数据获取。在布设测量控制点后,使用无人机按照设计的飞行路线获取数字影像。
(4)无人机摄影测量内业处理。将影像数据从飞机上的相机导出,并利用摄影测量软件对其进行处理,生成三维点云数据,并对其进行编辑,删除相关错误点。
(5)构建河道DOM 和DEM 模型。对点云数据进行分类,分为地面点和非地面点。利用地面点进行内插,构建河道DOM 和DEM 模型。
(6)河道断面图自动绘制。利用DEM 模型,设定河流断面位置,自动绘制生成河流断面图。
1.2 GPS-RTK 测量
RTK 系统主要由基准站、移动站及无线电通讯系统组成。GPS 接收机、接收天线、无线电数据链电台及发射天线等组成基准站;GPS 接收机及接收天线、无线电数据链接收机和电子手簿等部分组成了流动站[8]。与传统测量方法相比具有定位准确、操作简单、全天候作业等优点。该研究使用GPS-RTK 技术来测量控制点。通过设置基准站和流动站,实现两者之间的通讯。将流动站放置于控制点的中心位置,保持水准气泡居中及测杆对中,获得该控制点的准确坐标,并保存到手簿中。另外,考虑到实验河道宽度较小、水深较浅,直接使用测杆放置于数个断面靠近岸边的位置,安全快捷地获得该点的坐标及相应的水深数据。
1.3 无人机摄影测量
1.3.1 相机标定和图像匹配
由于无人机搭载的是普通非量测相机,为了提高无人机影像质量与量测精度,必须对其进行相机标定。相机标定是校准相机内方位元素和光学畸变参数的过程,也是实现从二维图像转换到三维信息的重要步骤[9]。相机标定的作用构建相机畸变模型,计算出一组光学畸变参数,包括焦距、主点位置、三个径向失真系数(K1,K2,K3)和两个切向失真系数(P1,P2)。解出光学畸变参数后,就可以利用这些参数实现无人机任意影像的畸变校正,提高影像质量的同时减少影像误差。文中所采用的相机畸变模型如下

式中:(xd,yd)为畸变图像的像片坐标,(xu,yu)为畸变纠正图像的像片坐标,(x0,y0)为像主点坐标,k1、k2为需要求解的径向失真畸变参数
相机标定需要使用控制点坐标。由于该方法采用50 cm×50 cm 打印有黑白色块的硬纸板作为控制点,所以可采用自动提取特征圆点中心的方法,实现控制点中心的自动精确定位[10]。自动提取特征圆点中心的公式如下

式中:gij是控制点区域像点的二值影像灰度,wij为像点对应的原始灰度,i、j 分别是像点对应的影像行列号,x、y 是自动定位出的控制点中心像平面影像坐标。
完成相机标定和图像畸变纠正后,就可以进行图像匹配。根据无人机相机位置信息,对外业拍摄的无人机影像进行排列。在相邻影像重叠区域检测公共特征点并完成特征点匹配[11],为后面的步骤作好准备。
1.3.2 点云生成和编辑
根据上一步图像匹配的结果生成河道测区的稀疏点云。在此基础上,根据估算的相机位置计算其深度信息,并采用内插算法将每个相机的深度信息合并为一个完整的密集点云。由于实验河道两侧有较多的树木和部分建筑,根据这种未经处理的密集点云生成的DOM 和DEM 模型会存在拉花和失真的现象。因此,在生成DOM 和DEM 模型之前,必须对密集点云进行编辑。文中将密集点云自动分为两类,即地面类和非地面类。首先,将密集点云分成固定大小的单元格,在每个单元格中检测高程最低点,利用这些最低点的三角剖分生成DEM 模型的初始值。然后,将新点添加到地面类中,前提是它满足两个条件:与DEM 模型间隔一定距离,并且DEM 模型与线之间的角度与该新点与地面之间的角度小于设定的某个数值。综上,可使用3 个参数来控制这两个条件:
(1)最大角度(°):将该点划分为地面点时要检查的条件之一,即设置地形模型与将相关点与地面类中的点连接线之间的角度限制。这个参数决定了场景内地面最大坡度。
(2)最大距离(m):将该点划分为地面点时要检查的条件之一,即对该点与地形模型之间的距离进行限制。这个参数决定了地面高程的最大变化。
(3)单元大小(m):确定点云的单元格大小,是将其划分为地面点分类过程中的准备步骤。像元大小应该根据实际场景和精度要求来合理设置。
另外,水面区域应根据测出的水面平均高程进行编辑,将水面区域内的点云高程统一设置为测出的水面平均高程。
1.3.3 DEM 构建
DEM 数据包括平面坐标和高程信息,可以直接通过全站仪、GPS 或者激光测距仪等测量获取,也可以间接从航空影像或者遥感影像和地形图上得到。文中结合无人机影像和GPS-RTK 测量数据来构建DEM 数据,该方式稳定可靠,保证精度的同时也具有较高的作业效率。目前DEM 数据的结构一般沿用不规则三角网和规则格网模型。文中采用规则格网模型(GRID),将所作业区域划分为一个个规则的网格,用一系列规则排列的相同大小网格表示河道区域三维信息。规则格网模型是一种典型的栅格数据结构,更加适宜于直接采用栅格矩阵进行储存。实际应用中,一个地区附近可能只存在少量已知高程的离散测量点,而存在大量未知的高程点。这个情况下需要进行DEM 内插。DEM 内插就是根据一些已知高程的测量点去计算得到附近未知点的高程坐标。现在常用的DEM 插值法主要有克里金法、反距离权重法、样条函数法和自然邻域法。文中研究主要使用反距离权重法,此方法中的每个已知高程点对最后内插结果都有着局部影响,该影响与距离成反比,随着距离的增加而减弱。这种随距离增大而不断减小的影响称为反距离权重,对反距离权重加权计算可得未知点的插值结果。反距离权重法的计算公式如下

1.4 河道断面的绘制
使用反距离权重法生成DEM 数据后,即可实现任意河道断面的自动绘制。用户只需要在河道场景中交互选择剖面切割线,剖面切割线应尽量垂直河流的走向。假设剖面切割线两端点坐标为(x0,y0)和(x1,y1),可求出其在水平面内的直线投影方程

式中:a=y0-y1,b=x1-x0,c=x0y1-x1y0。
然后计算河道断面直线投影方程与DEM 格网数据的交点,并采用最邻近点法或双线性插值法求出该剖面切割线所对应的河道断面。
2 实验结果
该实验使用深圳大疆公司(DJI)的M100 四旋翼无人机,搭载Zenmuse X3 云台相机,使用DJI GS Pro 软件规划飞行路线,沿河道拍摄1200 万像素的数字影像。设计航高100 m,影像重叠度为80%,最大飞行速度为5 m/s。同时,采用GPS-RTK 技术测量了14 个控制点和8 个断面。河道测区范围及测量点位如图2 所示。
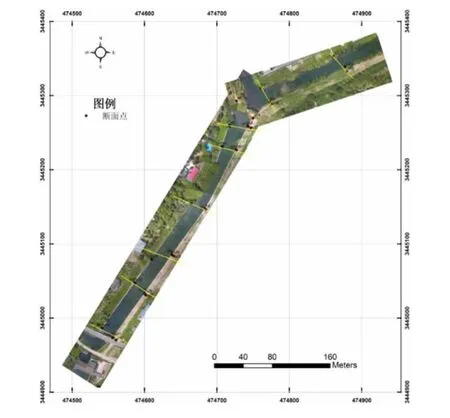
图2 河道测区范围及测量点位图
Agisoft PhotoScan 是由俄罗斯Agisoft 公司研发的摄影测量软件,可以根据影像自动生成DEM 模型,实现高质量的正射影像生成及三维模型重建。此次实验采用Agisoft PhotoScan 软件来进行无人机摄影测量内业处理。首先通过相机标定和图像匹配,构建密集点云和三维场景,如图3 和图4 所示。

图3 密集点云
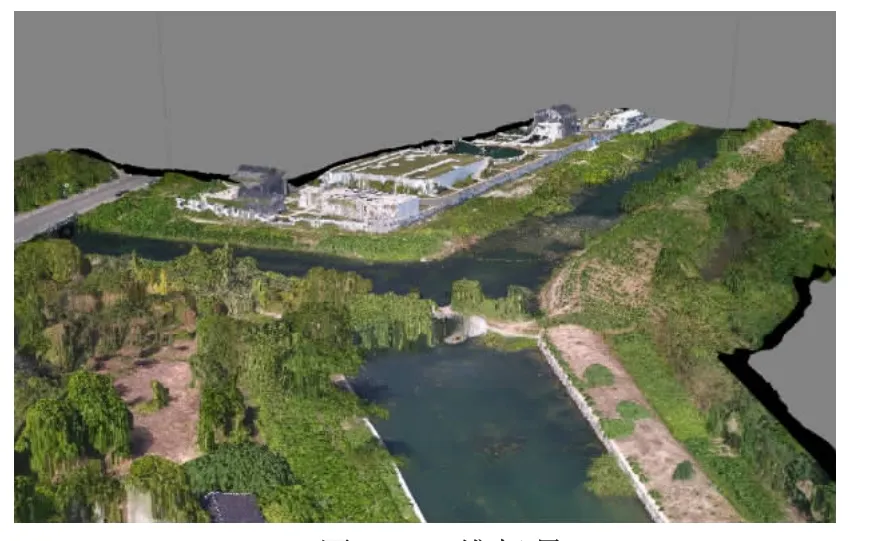
图4 三维场景
对密集点云进行编辑,并将其分为地面点和非地面点。基于地面点密集点云进行计算,最终生成DEM和DOM 数据,如图5、图6 所示。
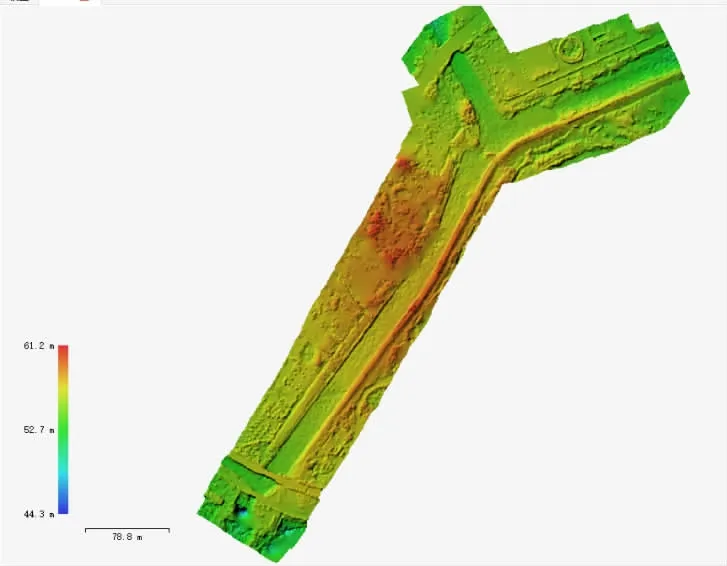
图5 生成的DEM 模型

图6 生成的DOM 模型
生成河流研究区域的DEM 数据后,用户可以手工选择剖面切割线,根据选定的剖面切割线即可自动绘制出对应的河道断面图,直观地反映出河流地形,如图7 所示。
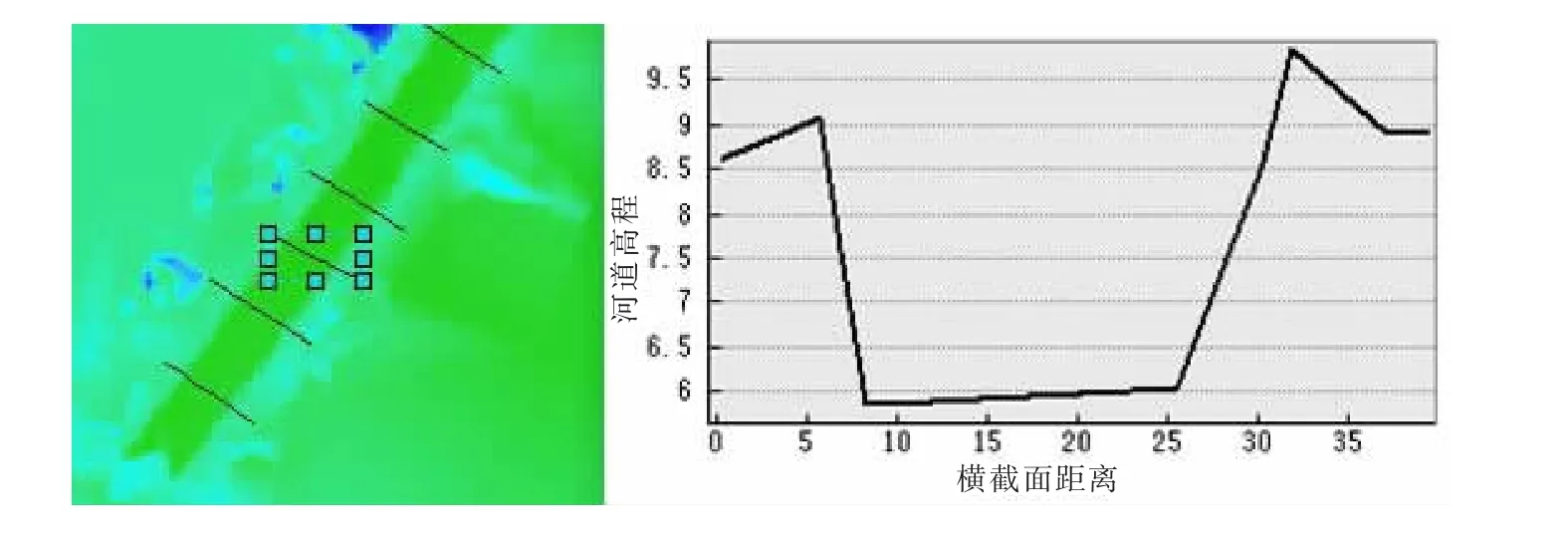
图7 剖面切割线及其对应的河道断面图
为了验证河道断面三维模型的精度,从20 个已量测的控制点中随机选择12 个控制点,利用这12 个控制点建立三维模型。将剩下的8 个点作为检核点,将检核点的三维坐标与对应模型点的三维坐标作比较,X、Y、Z 方向的中误差分别是0.054 m、0.044 m 和0.098 m,见表1。该精度可基本满足河道断面三维模型的精度要求。今后可通过相机检校等方式进一步提高三维建模的精度。

表1 检核点精度表
3 结语
该研究将无人机与GPS-RTK 引入河道断面测量,使用无人机拍摄河道研究区域的影像,利用GPSRTK 技术测量控制点坐标及河流深度,基于无人机数字摄影测量技术构建河流DEM 模型,最终实现河道断面图的自动绘制。与传统方法相比,文中方法操作简单、工作量小、作业效率高,可快速实现对河道断面的测量。为摸清河道现状、维护河道健康提供基础调查数据。
猜你喜欢
当代陕西(2020年23期)2021-01-07 09:24:44
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
中国工程咨询(2017年12期)2017-01-31 02:56:54
安徽地质(2016年4期)2016-02-27 06:18:21
全球定位系统(2015年4期)2015-02-28 12:38:13
全球定位系统(2015年4期)2015-02-28 12:38:12
浙江国土资源(2014年5期)2014-04-28 09:04:19
癌变·畸变·突变(2014年2期)2014-03-01 04:39:41