
下肢康复设备实现等速训练方法的研究
2020-06-20 03:36:20齐方宇姜礼杰
机械设计与制造 2020年6期
齐方宇,姜礼杰,王 勇
(合肥工业大学机械工程学院,安徽 合肥 230009)
1 引言
脑卒中、脊髓炎等神经系统疾病的临床症状多表现为肢体运动功能障碍,例如截瘫和偏瘫,患者生活难以自理,给其带来了极大的痛苦[1],传统“医患一对一”的康复模式因其效率低、费用高的特点已经难以满足当下日益增多的患者的康复治疗需求[2],因此,康复机器人凭借其高效性、智能化等特点在医疗领域受到了极大的关注,成为机器人领域中的研究热点[3]。
等速技术是国际上一项较为先进的肌力功能评价和康复技术,对于使用者,能够在保障安全的前提下高效地恢复和改善肢体功能,兼有等长收缩和等张收缩的优点[4]。使用时,设备强制肢体以预设速度进行等速运动,主动训练时,使用者肢体的用力只能加大肌肉张力和力矩的输出却无法使运动肢体产生加速度[5],使得肌肉在运动过程中保持最大张力,从而达到最佳康复效。它能够对运动系统进行精确的分析和评估,因而被广泛应用于康复评定和临床康复实践中[6]。
目前市场上常见的等速训练系统主要有Cybex、Biodex、Kin-com和Lido Active等[7],均为国外品牌,装置体形笨重,售价高昂且使用不便,都是通过运动肢体与训练装置绑定来实现等速训练,使用者大都只能在特定医院内由医师指导使用,无法普及开来实现大众化。国外厂商对我国实行技术封锁,禁止国内技术人员拆卸设备中的大部分装置,极大地限制了等速训练装置的推广与使用[8]。在国内,等速肌力康复技术的研究起步不久。目前对等速训练装置的研究也多面对膝关节康复治疗领域,对于髋关节及踝关节等速运动的研究少之又少[9],因此,研制一款可实现多关节等速康复训练的康复设备具有深远的现实意义。
康复机器人从结构上可分为外骨骼式和末端执行式等[10]。外骨骼穿戴类康复机器人多处与患者的下肢接触,带动肢体与机器人同步完成训练[11]。外骨骼康复设备的特点是可以在患肢上施加力矩作用,但是机构容易与患肢产生干涉,适应性较差,惯性冲击大,运动连续性差[12],训练过程中外骨骼系统仿生性能较差,难以符合生物力学要求、控制生硬且穿戴很不方便[13],并不适合使用者进行等速训练。而末端执行类康复机器人通过与患者肢体上的某一点或某一位置接触,带动患肢进行康复训练[14]。其特点是结构易于设计,适应性强。等速训练装置采用末端执行式,机构与患肢不产生干涉,可尽量避免患肢受到二次损伤,且拥有足够的反向驱动能力,可以很好地实现反转的康复训练[15]。训练时通过调整设备末端位置和力之间的关系来实现对力的控制,使设备末端产生一定的柔顺性[16]。设备轻巧,使用简单,方便不同患者使用。
针对末端执行式下肢康复训练设备,提出了一种可令其实现髋、膝关节等速训练的方法。建立人机模型,并对其进行运动学分析,探讨了在运动过程中可实现下肢髋膝关节等速训练的曲柄运动规律。最后利用仿真分析软件对曲柄控制规律进行分析与验证。
2 规划关节运动曲线
等速训练最理想的速度以及加速度要求如下:
(1)角加速度连续平稳,运动速度可控制;
(2)运动始末,角速度、角加速度归0;
(3)当加速至设定的最大角速度时,角加速度为0,在关节角度运动转向时,角速度、角加速度为0。
由上述三个条件规划关节角度运动,如图1所示。图中:ωmax—规划关节等速运动速度;t0—起始时刻;在t3时刻关节活动度处于最值区域,角速度归0,开始进行转向运动;t0—t6完成整个关节一个等速训练过程,不断循环往复完成等速训练。

图1 理想的等速训练角速度曲线Fig 1 Ideal Angular Velocity Curve for Constant Speed Training
角速度ωmax可表示为:

3 人-机模型分析
忽略下肢的生理结构,可将其简化成一个多刚体运动系统,其主运动区域在矢状面内,因此建模时将下肢各关节皆简化为单个自由度的平铰。考虑到患者安全,常使用辅具将患者的小腿和足部固定在训练设备的脚踏上,故建模时将小腿和足部视为一个刚体。下肢在矢状面内运动对称,左右相位差180°,故只研究其中一侧肢体运动状态即可,选取右侧进行分析。
依据上述分析建立笛卡尔直角坐标系,如图2所示。图中:点M、E、F、G、H—人体踝、膝、髋、肩和肘关节;A、B、C 点—滑台铰链;D点—训练设备曲柄轴心;h—髋关节和滑台面的垂直距离;s—两者的水平距离;DM:曲柄,长 r,与 x轴正方向夹角为 θ1,取逆时针旋转方向为正;l1—AB;l2为 AC;l3—线性致动器 BC;l4—AD;l5—EM;l6—EF;θk—膝关节夹角;θh—大腿与竖直面夹角;ωk—膝关节角速度;αk—膝关节角加速度。

图2 矢状面人-机模型Fig.2 Sagittal Man-Machine Model
3.1 运动学正分析
由图2,设M点坐标(xm,ym),根据闭环矢量关系:

其中,

根据(2)式可求得:

将(2)式两边关于t求导,得髋、膝关节角速度:

对(5)式两边关于时间求导,得髋、膝关节加速度:
3.2 运动学逆分析
由式(2)~式(4)可知,髋、膝关节活动规律还与曲柄长度r、曲柄转角θ1以及人体位姿参数中的距离s、高度h有关。从实用角度考虑,通过改变曲柄的运动规律实现关节的等速训练,运动学逆分析根据前文所得的运动规划轨迹来求训练设备中曲柄的运动规律。
髋、膝关节等速训练时,对(2)式关于时间t求导可得:

其中,消去髋关节角度ωh,可求得曲柄速度ω1与膝关节角速度ωk关系:

其中,消去膝关节角度ωh,可求得曲柄速度ω1与踝关节角速度ωh关系:

由式(8)、式(9)可知,髋、膝关节等速训练时,曲柄转速 ω1与髋、膝角速度之间的函数关系是超越函数。
为了简化计算过程,可以设使用者在某一固定坐姿下髋、膝关节角度最大、小值分别为:θhmax、θkmax、θhmin、θkmin,根据图 1 中的规划,髋、膝关节活动度可表示为:

可求得髋关节的运动周期Th为:

同理,可求得膝关节的运动周期Tk为:

其中,Δθh=θhmax-θhmin
4 仿真分析与试验
为了验证求得等速训练控制规律的正确性,选取《GB10000-88中国成年人人体尺寸标准》中18~60岁50百分位的成年男子为例进行验证,具体参数,如表1所示。

表1 50百分位中国成年男子人体主要尺寸Tab.1 50 Percentile Main Body Size of Chinese Adult Men
选取实验者,对实验参数设定如下:座椅靠背倾斜角为120°,曲柄长度 r为 100mm,E 点坐标为(0,700),D 点坐标(650,450)。分别对髋、膝关节先后均以6r/min等速训练,对其角速度规划,如图3所示。

图3 髋膝关节等速训练曲线Fig.3 Isokinetic Training Curve of Hip and Knee Joint
由式(8)、式(9)中曲柄转速与髋、膝角速度之间的函数关系可进行求解,结果,如图4所示。
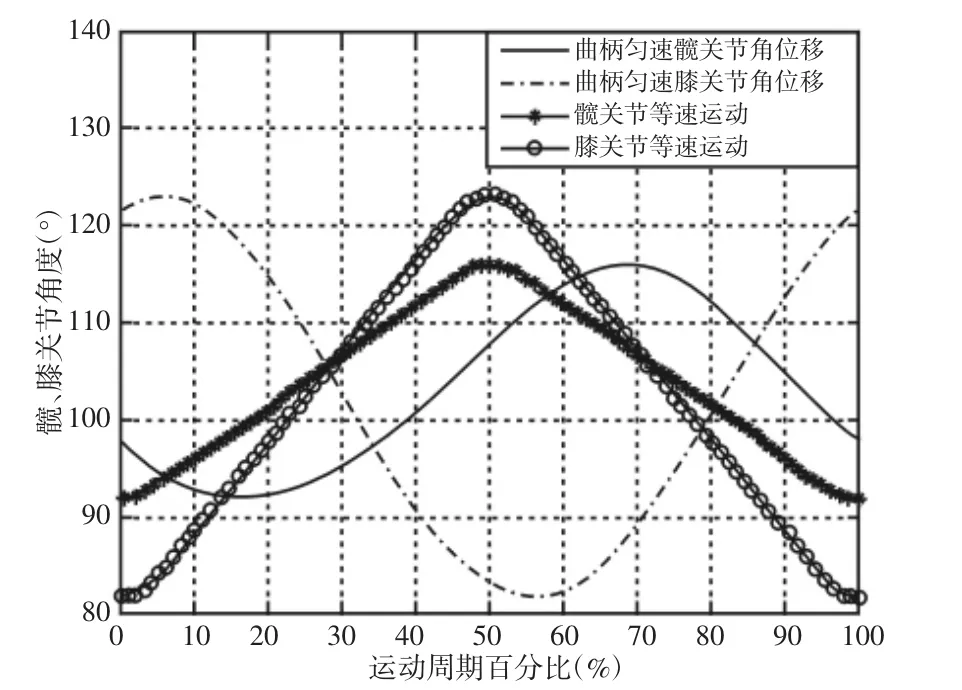
图4 运动规划训练规律Fig.4 Training Rules of Motion Planning
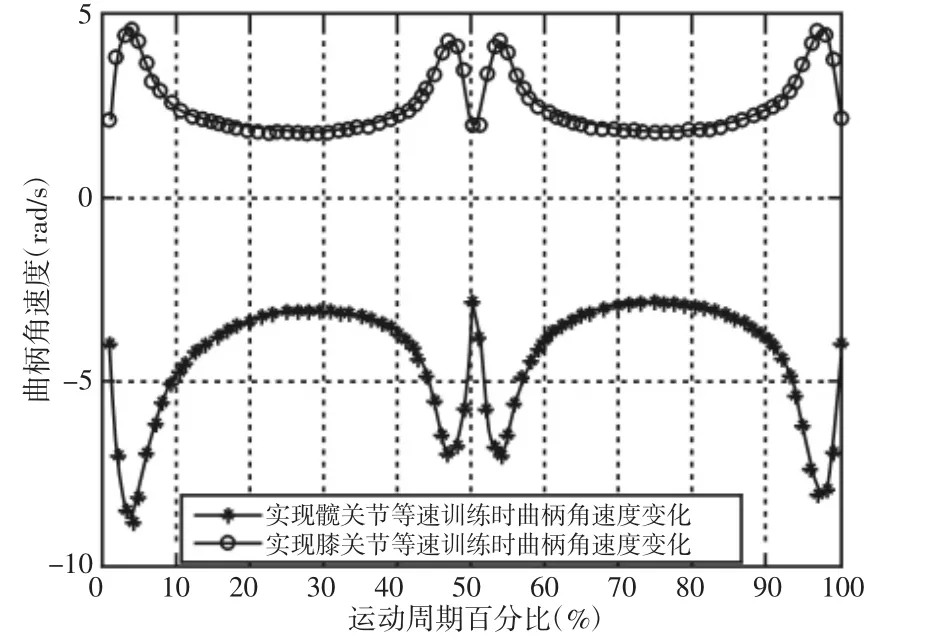
图5 曲柄角速度曲线Fig.5 Crank Angular Velocity Curve

图6 关节角度曲线Fig.6 Joint Angle Curve

图7 髋、膝关节角加速度曲线Fig.7 Hip and Knee Angular Acceleration Curves
实现髋膝关节等速训练时曲柄转速ω1在一个运动周期的变化情况,如图5所示。将规划髋,膝关节等速训练规律曲柄角度θ1、转速ω1变化规律,代入到式(3)中所得到的膝,髋关节角度变化规律的对比图,如图6所示。从图中可知,二者几乎完全重合,验证了控制规律的可行性;髋膝关节等速运动时曲柄角加速度变化情况,如图7所示。为判断柔性冲击提供参考。
5 结论
(1)提出了一种能够使得末端执行式下肢康复训练设备实现髋、膝关节主被动等速康复训练的控制方法,适用于不同康复期下肢运动障碍者;(2)根据人体下肢生理结构和康复运动特点,结合训练设备的结构,在矢状面内建立人-机模型,并对其进行运动学分析与求解;(3)对人体髋、膝关节等速运动规律进行分析,并根据关节活动度的变化规律推导出了髋、膝关节的角度、角速度与康复设备曲柄转速之间的关系;(4)选取某一类使用者对髋膝关节等速运动控制规律进行仿真分析。仿真结果表明,所提出的控制规律能够较好地实现髋、膝关节等速训练。同时,提出的关节等速控制方法也为其后续研究奠定了基础。
猜你喜欢
中国民间疗法(2021年16期)2021-11-04 08:13:58
机械工程师(2021年4期)2021-04-19 07:27:56
家庭医学(下半月)(2020年3期)2020-05-30 12:42:04
设备管理与维修(2019年22期)2019-12-19 01:30:12
机械研究与应用(2018年5期)2018-11-05 05:59:38
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国医疗美容(2015年1期)2015-07-12 10:06:07
中国铁道科学(2015年4期)2015-06-21 06:46:06
沈阳医学院学报(2014年4期)2014-12-27 13:44:20
