Lévy稳定过程均值变点监测在GEWMA和GLR控制图中的对比
2020-06-17 02:44胡松瀛
安阳师范学院学报 2020年2期
胡松瀛,李 泰
(亳州学院 电子与信息工程系,安徽 亳州 236800)
变点问题是统计学中非常热门的一个课题,研究变点问题的一个重要工具是控制图,比较常见的控制图有累计和控制图CUSUM[1]、累积分控制图Cusore[2]、广义似然比控制图GLR[3]、广义指数加权移动平均控制图GEWMA[4]等。常用平均运行长度ARL来对比不同控制图的监测结果。现实中,很多随机变量是服从稳定分布的,有无限方差,被称为Lévy稳定过程。首先给出了GEWMA和GLR控制图监测Lévy稳定过程均值变点ARL的区间估计,然后对监测的效果进行了数值模拟比较。
1 预备知识
引理1[5]相互独立的随机变量Wi,Wi~Sλ(ai,bi,μi),i=1,2,则
W1+W2~Sλ(a,b,μ)
(1)

引理2[5]随机变量W~Sλ(a,b,μ),d是实常数,则
S+d~Sλ(a,b,μ+d)
(2)
引理3[5]随机变量W~Sλ(a,b,μ),实常数d≠0,则
dW~
{Sλ(|d|a,sign(d)b,dμ)λ≠1,

(3)
引理4[5]随机变量W~Sλ(a,b,μ),0<λ<2,则


(4)
其中
2 平均运行长度ARL的估计
随机变量W1,W2,…,Wn是独立稳定的,检验问题:
H0:Xi~Sλ(a,b,μ0),i=1,2,…,m
H1:Xi~Sλ(a,b,μ0),i=1,2,…,δ-1
Xi~Sλ(a,b,μ),i=δ,δ+1,…,m
(5)
其中,变点δ未知,μ0≠μ,λ∈(0,2],b∈[-1,1],a≥0。
假设检验(5)是对过程均值是否有变点进行检验,没有变点接受H0,有变点接受H1。从时刻δ开始,均值发生μ-μ0的变化。μ>μ0时为向上漂移,μ<μ0时为向下漂移。不论是向下漂移,还是向上漂移,监测的方法上没有实质区别,故只讨论向上漂移的监测并且假设μ0=0,a=1,b=0,δ=1。另外设ARL0是受控平均运行长度,ARLμ是失控平均运行长度,
ARL0(T)=E(T)ARLμ(T)=Eμ(T)
其中T是过程失控预警的时间。考虑到实际情况,求出控制极限c充分大时控制图的平均运行长度ARL的估计。
定理1稳定过程的第i个观测值Wi~Sλ(1,0,μi),i=1,2,…,且相互独立,设μ0=inf[μi],μ0=sup[μi],其中1<λ≤2,μi≥0,那么对于GEWMA控制图
(6)
证明由于
得

所以当0≤s<1时,有g′(s)≤0,因此当l≤n0时,有

那么
因而
定理2稳定过程的第i个观测值Wi~Sλ(1,0,μi),i=1,2,…,且相互独立,设μ0=inf[μi],μ0=sup[μi],其中1<λ≤2,μi≥0,对于GLR控制图,有
(1+o(1))c2λ/(6-λ)e-Cλ/4≤ARLμi(TGL)
≤(c2/μ02+cb/μ0)(1+o(1))
(7)


故当1≤l≤N,F(l)在N处取得最小值,那么
(7)式的向下不等式得证。
设M(c)=c2/μ02+cb/μ0,Mi=M(c)i,i≥0
因为
(7)式的向上不等式得证。
3 数值模拟
在ARL0相等的条件下取定μ,然后比较ARLμ,ARLμ越小说明这种控制图的效果就越好。表1、表2是GEWMA和GLR这两种控制图监测向上漂移的模拟结果。首先设时间序列服从Sλi(1,0,μ),其中αi∈(1,2],然后运用rstalbe程序生成随机变量序列Wi~Sλi(1,0,μ),τ=1,模拟结果是由10000次重复实验得出。
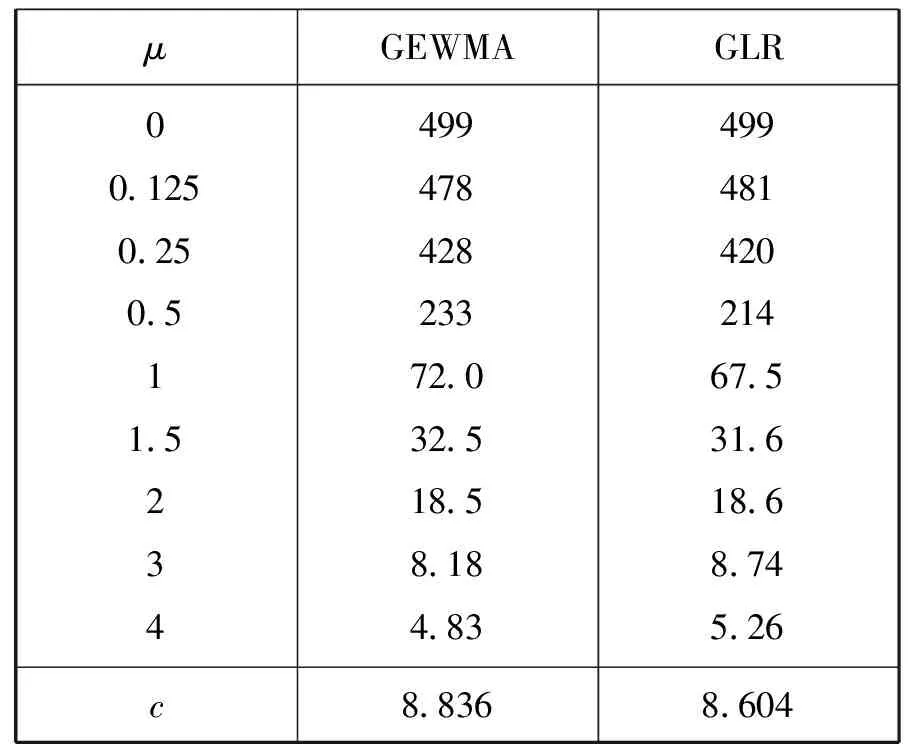
表1 Wi~S1.8(1,0,μ)
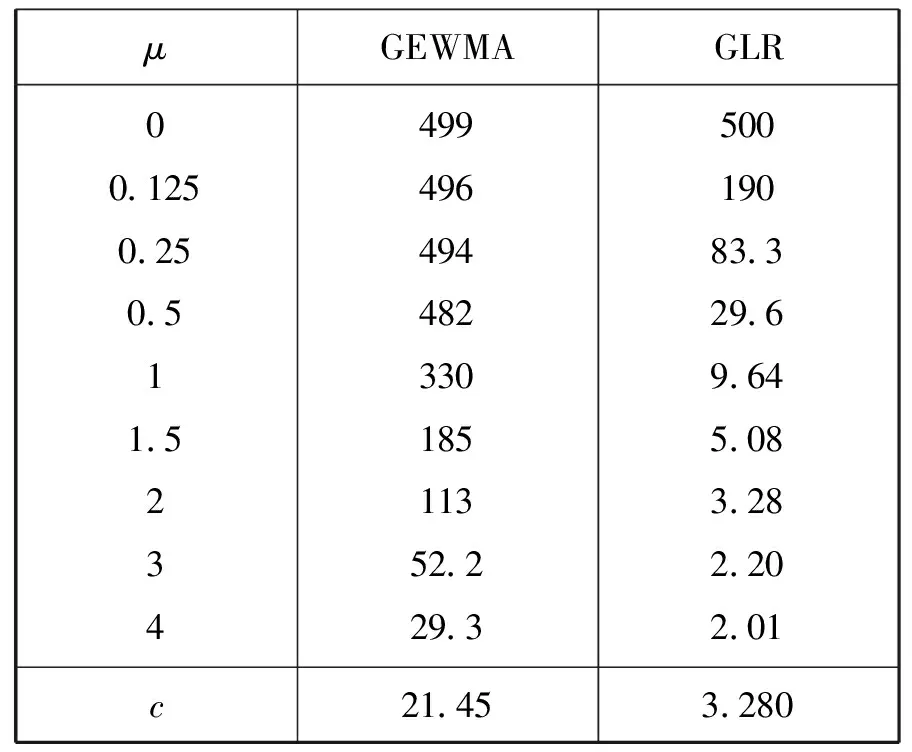
表2 Wi~S1.5(1,0,μ)
4 数据分析
通过对比,可以得到,如果λ=1.5,这时控制图GLR的效果优于GEWMA,如果λ=1.8,两种控制图效果不相上下。
猜你喜欢
中国化肥信息(2022年8期)2022-11-30
九江学院学报(自然科学版)(2022年2期)2022-07-02
中国新闻周刊(2022年16期)2022-05-09
科学与生活(2021年17期)2021-11-10
卷宗(2018年14期)2018-06-29
新高考·高一物理(2016年3期)2016-05-18
决策与信息(2014年16期)2014-12-07
决策与信息(2014年6期)2014-11-19
意林(2013年7期)2013-05-14
云南中医学院学报(2012年3期)2012-07-31