不同作业模式下的GNSS/声学联合定位模型
2020-06-15 06:33:06邝英才吕志平王方超
导航定位学报 2020年3期
邝英才,吕志平,王方超,许 炜
不同作业模式下的GNSS/声学联合定位模型
邝英才,吕志平,王方超,许 炜
(信息工程大学 地理空间信息学院,郑州 450001)
为弥补目前全球卫星导航系统(GNSS)/声学联合解算研究中的不足,提出1种海底控制点布设的联合定位模型:给出观测过程统一并顾及基准转换的GNSS/声学联合定位原理,并在不同作业距离、不同应答器数量条件下,推导出联合模型相应的数学模型;最后以分层等梯度声速跟踪终点位置为参考,通过实测数据进行验证。结果表明,当水下观测数据质量及数量受限时,较之传统多步求解法,联合定位法能得到更高的定位精度。
底控制点;全球卫星导航系统;GNSS/声学;声速跟踪;基准转换;多源融合
0 引言
随着经略海洋战略的制定,建设可靠的海洋大地基准已迫在眉睫[1-2]。作为组成海洋大地测量控制网的关键一环,海底控制点高精度3维坐标的确定,成为近年来海洋测绘领域的热点[3-7]。美国在20世纪80年代,就基于全球卫星导航系统(global navigation satellite system, GNSS)在海洋测绘中应用的诸多优势,提出利用水下声学定位技术结合GNSS海面定位技术,对海底点进行观测标定[8]。现阶段被广泛认可的是利用可控航迹的测量船,搭载测量设备及相关传感器进行观测的实施方案,该方案以测量船为枢纽,通过距离交会确定全球坐标框架下海底控制点的绝对坐标。
复杂海洋环境以及多类观测信息的融合,势必会带来更多潜在误差的影响[9]。为削弱组合定位中的各类误差,国内外学者从不同方面展开了研究。从观测量获取角度考虑,海面GNSS定位根据作业距离长短,可以选择与岸基基准站差分定位或深远海动态精密单点定位(precise point positioning, PPP)[10]。文献[11]论证了优化航迹的实质,是改善声学观测空间的几何结构,进而提高声学定位精度;文献[12]根据背景声速剖面误差和声速长周期系统误差的特点,设计了多应答器中垂线航迹,通过应答器间作差分,可以消除相关误差。从数据处理角度考虑,可以将重要误差项参数化[13],或采用更贴近误差变化特点的精化模型[14],此外还有学者[15]利用声学初始入射角,来完善水下定位随机模型。针对控制点垂直方向精度不高这一难点,目前大多通过加入换能器至应答器的高精度深度差测量值,来约束原始测距方程[16],提升点位精度。上述研究在解算待求点坐标时,均将海面及海面以下观测过程分开处理,考虑到水下观测精度日益趋近海面GNSS观测精度,文献[17-18]提出,可以通过函数关系及观测量间权比的准确描述,将GNSS观测信息、姿态信息、水下声学观测信息等相结合进行整体处理。近年来,包容多种测量手段、强调多源数据融合的综合定位、导航、授时(positioning, navigation and timing, PNT)体系逐步发展[19],可以预见,建立统一观测信息的GNSS/声学联合定位模型,将会构成建立我国海洋大地测量控制网的重要理论基础。
已有研究对GNSS/声学联合定位的基础理论进行了探讨,但是模型建立尚存在许多可扩展的细节。针对目前研究的不足,本文细化在近海、深远海域,单应答器、多应答器等不同实验条件下,对应的GNSS/声学联合定位模型,以期为相关研究提供参考。
1 GNSS/声学联合定位原理
1.1 海面及水下观测过程
随着GNSS全球化发展进程的加快,卫星定位技术正逐渐融入海洋测绘领域的诸多重要环节。虽然海面利用电磁波测量简便且可靠,但其在水下的传播会出现严重衰减,无法支撑正常的测量工作;因此,目前水下基本依靠声脉冲信号进行目标测距。基于此思想,各国开始尝试结合GNSS定位技术和声学定位技术,建立海底控制点,其观测过程如图1所示。
作为整个观测过程的枢纽,测量船需要提前规划好航行轨迹,相较于浮标或早期实验船的漂浮策略,可以在避免过多冗余数据的同时,保证良好的观测空间几何结构,削弱声学测距误差。测量船搭载GNSS天线进行实时GNSS动态观测,若在近岸海域,通常需再设立岸基基准站进行同步观测。此外,船上还需搭载定向罗经、姿态测量、盐温深(conductivity temperature depth,CTD)测量等传感器。若采用最常用的长基线水声定位方法,则船体底部应安置单探头收发换能器装置,与海底应答器进行声脉冲信号传输。通过采集GNSS观测信息、姿态观测信息、声速剖面观测信息、水位计观测信息、声学观测信息等,实现海面基准传递至海底控制点。
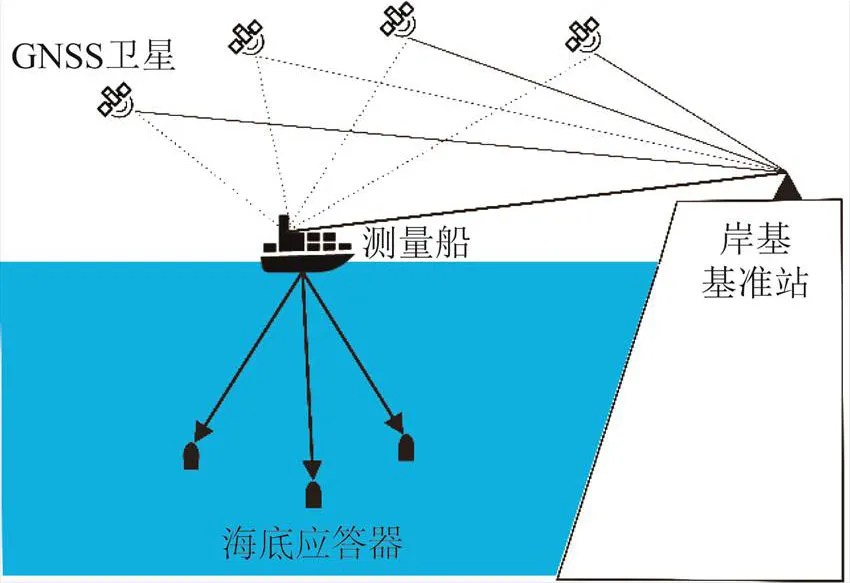
图1 GNSS/声学联合观测过程
1.2 船体坐标系
海面GNSS动态定位可以得到全球坐标框架下的天线中心坐标;但与海底应答器建立联系的船底收发换能器中心与其并不重合,还需要进行基准转换。考虑到水位计测量值等在局部坐标系下讨论更为直观,故须引入2种船坐标系。
选择船体上某点作为坐标系原点(通常为与海面相切的船重心),轴指向测量船前进方向,轴垂直于平均海平面向下,轴与轴共平面,指向符合右手坐标系,称此时建立的坐标系为船体水平坐标系,又称船体标准坐标系。此坐标系建立在测量船理想航行状态的基础上,认为坐标轴指向恒不变。然而受风浪等海洋环境影响,测量船在航行过程中时刻发生着姿态或航向的变化,因此需要建立更符合实际运动状态的坐标系。约定坐标系原点不变,轴指向船艏,轴指向右舷坐标轴,轴垂直于船体向下,此时的局部坐标系即为船体坐标系。由于船体坐标系在航行过程中跟随船体姿态实时变化,故姿态变化是在船体坐标系下而不是船体水平坐标系下进行讨论的;事实上,测量船进行作业之前,需要进行各传感器测量中心的相对位移标定,按照定义,标定值所属坐标系也应为船体坐标系。
1.3 海面基准转换
GNSS/声学联合定位模型将海面观测与水下声学观测联合求解。为了建立GNSS天线中心坐标与海底应答器坐标之间的联系,就需要在同1个函数模型中对海面基准转换进行准确描述。
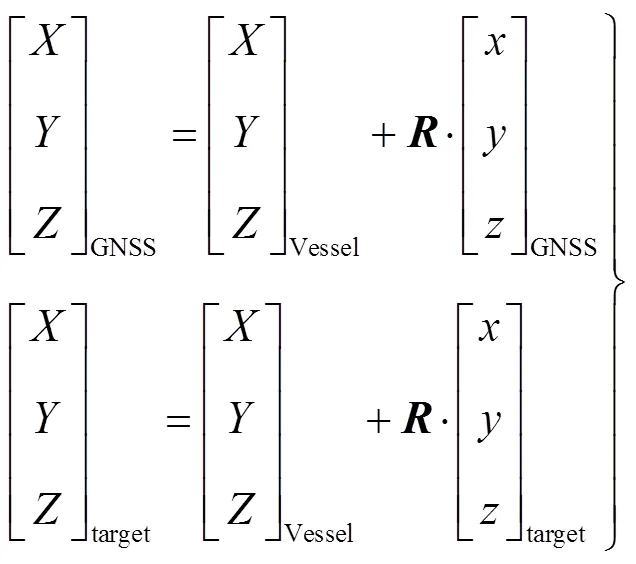
根据2种船坐标系的定义可以发现,对船体坐标系下各参考点的相对偏移进行横摇角、纵摇角、航向角3种姿态角转化,则可以将其转换至船体水平坐标系下;再根据全球坐标框架与局部坐标系之间的坐标旋转关系,可将船体水平坐标系下的参考点偏移转换至全球坐标框架下;最后结合观测得到的GNSS天线中心地理坐标,即可得到其他参考点(如换能器)在全球坐标框架下的绝对地理坐标。上述过程可以表示为
2 不同作业模式下的GNSS/声学联合定位数学模型
2.1 作业模式1(深远海域+单应答器布设)
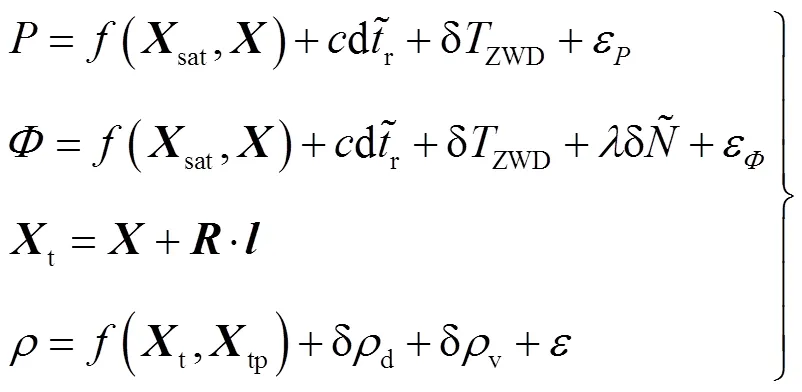
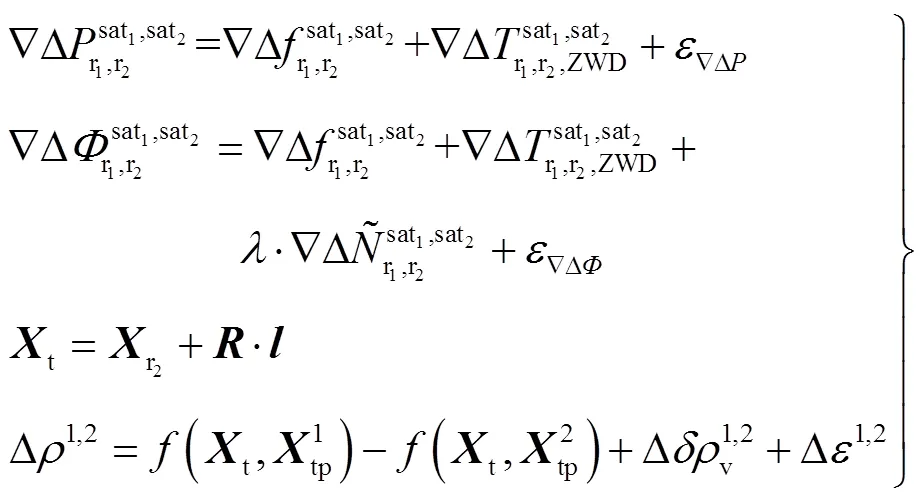
海洋广袤无垠的特点,使陆地上部分技术手段无法直接应用于海洋测绘领域。在距离海岸上百千米的深远海域,因远远超出可靠的作业距离范围,很难依靠海面动态差分定位;应改用不受作业距离限制的船载动态PPP模式。为保证时间的同步性,水下采用几何定位法,并加入基准转换方程,将海面与水下观测方程联系起来。此时GNSS/声学联合观测模型可以表示为
为提高垂直解精度,可以利用相对更高观测精度的水位计压力深度值对观测模型进行约束[16]。结合式(1),可以推导出在船体水平坐标系下,换能器至应答器的深度差公式,即约束方程为

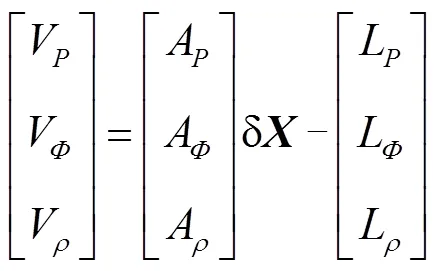


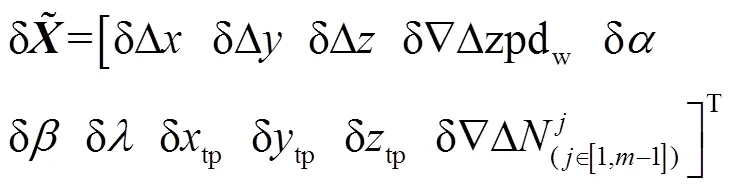
由以上分析可知,在深远海域对海底单应答器进行定位时,GNSS/声学联合定位模型的状态向量具体形式应为

2.2 作业模式2(深远海域+多应答器布设)
考虑到远海测量高成本、多耗时的特点,对于深远海域多应答器位置的确定,将是未来海洋基准研究的重点。该作业条件下,仍可以按照上节方案,将各应答器单独进行处理,但效率较低。此时可以利用多应答器同步信号传输的特点,优化测量船航迹,在应答器间进行水下差分,消除部分声学测距误差[21]。
以双应答器为例,若通过合理规划航迹,使2个应答器的信号传输距离在本次航行过程中始终一致,则可以将同历元观测方程进行差分,以达到消除部分声速测距误差的目的。经过差分组合,式(2)中的水下声学信号观测方程改写为


相应地,约束方程变为2维形式


从状态向量的构成可以发现:采用此模型定位深远海域多应答器位置时,待估参数较多;一方面应该保证有适量必要观测数据,避免平差秩亏问题,另一方面应实时关注动力学扰动造成的参数异常问题,可以通过引入自适应滤波方法削弱其影响[22]。
2.3 作业模式3(近岸海域+单应答器布设)


将式(2)中海面观测方程替换为式(11),并联立式(3),即为该作业模式下GNSS/声学联合定位观测模型,待估状态参数向量为
2.4 作业模式4(近岸海域+多应答器布设)
在上述分析的基础上,海面与岸基基准站进行动态差分定位,水下在各应答器间进行差分定位;结合合理规划的测量船航迹,可以直接得到该作业模式下GNSS/声学联合定位观测方程为
约束方程形式与式(9)一致。相应地,此时误差方程待估状态向量具体形式为

3 实验与结果分析
基于以上理论推导和实测实验特点,对在深远海域单应答器布设作业模式下,GNSS/声学联合定位模型效果进行了实验验证与分析。为得到高精度应答器的绝对位置,作为与模型定位结果的对比参考量,本文首先对各类实测数据进行预处理,并利用分层等梯度声速跟踪得到声线波束脚印坐标。
3.1 波束脚印位置计算
本文采用的实测数据来自胶州湾口海域实验的后处理结果。实验的日期为2018-10-11,测量船搭载全球定位系统(global positioning system, GPS)天线、声速剖面仪、电罗经、加拿大Applanix公司的POS-MV定位定姿系统等传感器,测量船在该海域进行了时长约为35 min的海上观测,如图2所示。测区水深约18 m。水下布设了1个应答器,利用安装在船底的声学基阵,对应答器进行标定。基阵与姿态传感器、姿态传感器与GPS天线、测量船重心与姿态传感器之间的相对位置关系已精确测定。船载基阵和应答器处各固定了1个水位计,水位计至基阵中心、应答器中心至应答器水位计的垂直距离已提前测量,水位计提供世界协调时(universal time coordinated,UTC)、水温、压强和深度信息。声速剖面仪测量了该水域的声速剖面,包括声速、水温、深度信息。

图2 测区位置
原始测量数据包括姿态传感器测量文件、GPS观测文件、声线基阵观测文件、水位计数据、声速剖面数据。其中,姿态测量文件可以用Applanix公司配套处理软件,提取出后续处理需要的姿态角等信息。而GPS观测数据提供了水下定位的水面基准,若其不可靠,将会严重影响应答器定位精度。本文采用高精度GNSS数据处理软件Rtklib动态定位模块,结合精密星历、精密钟差、伪码偏差(differenced code bias,DCB)文件、天线改正文件等,对测量船数据进行预处理,得到逐历元的船位坐标。利用以上数据信息进行分层等梯度声线跟踪,可以得到高精度的应答器坐标。
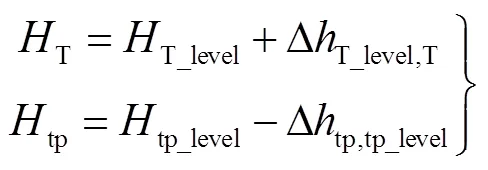
1)水位计数据处理。原始数据包括船载基阵处的深度数据和海底应答器处的深度数据,基阵深度和应答器深度的计算公式为
2)声速剖面数据处理。按照分层后,层内声速变化等梯度的原则,将原始声速剖面进行分层处理,由于后续处理时需要声速迭代初始值,需提前计算加权平均声速。实测声速剖面如图3所示。

图3 实测声速剖面曲线
3)解算应答器概略坐标。因为布设应答器时,未进行提前标定,故应答器概略坐标是未知的;而声速跟踪模型需要应答器概略坐标作为近似值参与解算,因此需要利用声基阵观测数据粗略求解应答器坐标。解算时,采用长基线定位系统处理单应答器模式时的定位方法,利用多个测量船船位实现应答器坐标解算。需要注意的是,GPS动态PPP结果是船载天线中心的坐标,而水下定位需要的是船底基阵中心的坐标;这就需要通过坐标系转换对基阵坐标进行改化。由于GPS观测数据采样率与声基阵观测采样率也不相同,改化后的基阵中心坐标序列仍需要进行插值处理。对所有历元的观测数据进行最小二乘平差后,可以得到应答器概略坐标。考虑到平差中使用了近似坐标,可以进行迭代平差以保证结果精度。
4)表层入射角精化。实际处理时发现:随着测量船的航行,部分历元基阵中心至应答器较远,此时其表层入射角将变大;当角度过大时,逐层计算的声线入射角可能不再是实数,即入射角计算发散。为避免这个问题,可采用改进表层入射角迭代计算公式[23],即


3.2 联合模型定位结果分析
基于自编GNSS/声学联合定位解算软件原型,对胶州湾口数据进行了处理,观测模型设置与2.1节相同,采用卡尔曼滤波进行参数估计,逐历元得到应答器3维坐标;另按照传统多步求解方法设计对比方案:船位坐标采用Rtklib软件动态差分定位模块逐历元解算结果,在不考虑姿态误差的情况下,通过基准转换得到逐历元换能器坐标,参与水下定位解算。利用实测声速剖面得到加权平均声速,与观测时延相乘作为逐历元的水下测距观测值,测距误差设为0.3 %倍的斜距观测值,采用最小二乘法进行迭代平差解算。以声速跟踪结果作为2种方案解算结果的对比参考值,将多步求解法结果与声速跟踪结果作差,统计各方向上的绝对差值分量为1.591、2.545、2.387 m;将联合定位结果与声速跟踪结果作差得到偏差序列,统计序列的标准差(standard deviation,STD),各方向上的STD值分别为1.073、0.782、1.812 m。
分析统计结果数据可知:受限于水下实测观测数据质量及数量,较之精度较高的声速跟踪结果,本实验中多步求解法最小二乘解算结果并不理想;而此时GNSS/声学联合定位方法相对更具优势,因其函数模型较准确地描述了卫星端至海底应答器的观测过程,通过对GNSS信息、水下声学信息、姿态信息等观测量在同一数学模型中进行统一处理,一定程度上改善了单一观测量可能造成的精度损失问题。由于我国海底控制点布设尚处于实验阶段,实测数据较少,GNSS/声学联合定位模型在其他几种作业模式下的应用效果还有待在后续研究中进行验证。
4 结束语
如今,多源观测信息融合技术在海洋测绘中的重要性愈发明显。针对目前海底控制点布设中的研究不足,在利用走航式测量船进行海面及水下观测的基础上,本文顾及不同海域、不同数量应答器的实验条件特点,分别推导了不同作业模式下的GNSS/声学联合定位数学模型,并基于实测数据进行了初步验证,得出以下结论:
1)分层等梯度声速跟踪模型计算细节较多,但刻画的曲线能逼近最真实的声线传播路径,故
其跟踪得到的波束终点位置具有较高的精度。
2)GNSS/声学联合定位模型顾及各类观测信息对海底控制点定位过程的贡献,合理准确地描述相互间的函数关系,使得联合卫星和声学观测信息解算海底控制点成为可能。在水下观测数据质量不高或数量较少的情况下,较之传统多步求解法,本文提出的方法可以得到更高精度的应答器定位结果。
下一步研究需要对不同作业模式下的联合定位模型进行细节精化,如引入抗差估计和自适应选权滤波算法,削弱观测粗差和动力学异常的影响,再如各类传感器间的时间配准问题等,避免不必要的精度损失,进一步改善联合滤波效果。
[1] 杨元喜, 徐天河, 薛树强. 我国海洋大地测量基准与海洋导航技术研究进展与展望[J]. 测绘学报, 2017, 46(1): 1-8.
[2] 刘经南, 陈冠旭, 赵建虎, 等. 海洋时空基准网的进展与趋势[J]. 武汉大学学报(信息科学版), 2019, 44(1): 20-40.
[3] OBANA K, KATAO H, ANDO M. Seafloor positioning system with GPS-acoustic link for crustal dynamics observation[J]. Earth, Planets and Space, 2000, 52(6): 415-423.
[4] XU P, ANDO M, TADOKORO K. Precise, three-dimensional seafloor geodetic deformation measurements using difference techniques[J]. Earth, Planets and Space, 2005, 57(9): 795-808.
[5] FUJITA M, ISHIKAWA T, MOCHIZUKI M, et al. GPS/acoustic seafloor geodetic observation: method of data analysis and its application[J]. Earth, Planets and Space, 2006, 58(3): 265-275.
[6] BALLU V, BOUIN M N, CALMANT S, et al. Absolute seafloor vertical positioning using combined pressure gauge and kinematic GPS data[J]. Journal of Geodesy, 2010, 84(1): 65.
[7] CHEN H H, WANG C C. Optimal localization of a seafloor transponder in shallow water using acoustic ranging and GPS observations[J]. Ocean Engineering, 2007, 34(17/18): 2385-2399.
[8] SPIESS F N. Analysis of a possible sea floor strain measurement system[J]. Marine Geodesy, 1985, 9(4): 385-398.
[9] 邝英才, 吕志平, 蔡汶江, 等. GNSS/声学系统定位精度影响因素分析[J]. 测绘通报, 2018 (12): 15-20, 45.
[10] GENG J, TEFERLE F N, MENG X, et al. Kinematic precise point positioning at remote marine platforms[J]. GPS Solutions, 2010, 14(4): 343-350.
[11] SATO M, FUJITA M, MATSUMOTO Y, et al. Improvement of GPS/acoustic seafloor positioning precision through controlling the ship’s track line[J]. Journal of Geodesy, 2013, 87(9): 825-842.
[12] SUN Wenzhou, YIN Xiaodong, ZENG Anmin. The relationship between propagation time and sound velocity profile for positioning seafloor reference points[J]. Marine Geodesy, 2019, 42(2): 186-200.
[13] ZHAO Jianhu, ZOU Yajing, ZHANG Hongmei, et al. A new method for absolute datum transfer in seafloor controlnetwork measurement[J]. Journal of Marine Science and Technology, 2016, 21(2): 216-226.
[14] 孙文舟, 殷晓冬, 暴景阳, 等. 海底控制点定位的半参数平差模型法[J]. 测绘学报, 2019, 48(1): 117-123.
[15] 赵爽, 王振杰, 刘慧敏. 顾及声线入射角的水下定位随机模型[J]. 测绘学报, 2018, 47(9): 1280-1289.
[16] 赵建虎, 陈鑫华, 吴永亭, 等. 顾及波浪影响和深度约束的水下控制网点绝对坐标的精确确定[J]. 测绘学报, 2018, 47(3): 413-421.
[17] Kuang Yingcai, LYU Zhiping, Wang Junting, et al. The GNSS/acoustic one-step positioning model with attitude parameters[C]//The Academic Exchange Center of China Satellite Navigation System Administration Office.Proceedings of 2019 China Satellite Navigation Conference (CSNC 2019). Singapore: Springer, 2019: 479-489.
[18] 邝英才, 吕志平, 陈正生, 等. 基于方差分量估计的多模GNSS/声学联合定位方法[J]. 中国惯性技术学报, 2019, 27(2): 181-189.
[19] 杨元喜. 综合PNT体系及其关键技术[J]. 测绘学报, 2016, 45(5): 505-510.
[20] SIMON D. Kalman filtering with state constraints: a survey of linear and nonlinear algorithms[J]. IET Control Theory& Applications, 2010, 4(8): 1303-1318.
[21] 孙文舟, 殷晓冬, 曾安敏, 等. 附加深度差和水平距离约束的深海控制点差分定位算法[J]. 测绘学报, 2019, 48(9):1190-1196.
[22] 邝英才, 吕志平, 李林阳, 等. 自适应选权滤波在GNSS/声学定位模型中的应用[C]//钱学森空间技术实验室. 中国惯性技术学会高端前沿专题学术会议: 天空海一体化水下组合导航会议论文集. 北京: 中国惯性技术学会, 2017: 117-129.
[23] 王振杰, 李圣雪, 聂志喜, 等. 水声定位中一种大入射角声线跟踪方法[J]. 武汉大学学报(信息科学版), 2016, 41(10): 1404-1408.
Study on GNSS/acoustic joint positioning model under different measurement schemes
KUANG Yingcai, LYU Zhiping, WANG Fangchao , XU Wei
(Institute of Geography and Spatial Information, Information Engineering University, Zhengzhou 450001, China)
In order to supplement the insufficiency in current study on the joint solution of GNSS/acoustics, the paper proposed an integrated positioning model for the layout of submarine control points: the principle of GNSS/acoustic joint positioning with unified observation process and reference conversion was given, and the corresponding mathematical model of the joint positioning was derived under the condition of different surveying distances and amounts of transponders; finally based on the tracking ending point location with the layered equal-gradient acoustic velocity, the measured data were used in test. Result showed that the proposed method could obtain higher positioning accuracy than the traditional multi-step method when the quality and quantity of underwater observation data are limited.
submarine control points; global navigation satellite system (GNSS); GNSS/acoustic; acoustic velocity tracking; datum transformation; multi-source fusion
P228
A
2095-4999(2020)03-0040-07
邝英才,吕志平,王方超,等. 不同作业模式下的GNSS/声学联合定位模型[J]. 导航定位学报,2020,8(3): 40-46.(KUANG Yingcai, LYU Zhiping, WANG Fangchao, et al. Preliminary study on GNSS/acoustic joint positioning model under different measurement schemes[J]. Journal of Navigation and Positioning, 2020, 8(3): 40-46.)
10.16547/j.cnki.10-1096.20200306.
2019-12-02
邝英才(1994—),男,四川成都人,博士研究生,研究方向为测量数据处理理论与方法。
猜你喜欢
环球时报(2022-08-15)2022-08-15 17:13:41
军事文摘(2021年22期)2022-01-18 06:21:58
铁道通信信号(2020年9期)2020-02-06 09:15:22
水下无人系统学报(2018年5期)2018-11-09 07:40:54
智富时代(2017年7期)2017-09-05 10:08:11
声学与电子工程(2017年1期)2017-06-22 11:30:07
铁道通信信号(2016年4期)2016-06-01 12:10:19
西北工业大学学报(2015年3期)2015-12-14 13:08:44
声学技术(2015年1期)2015-09-07 06:44:52
城市轨道交通研究(2015年11期)2015-02-27 11:02:50