改进蚁群算法在海洋信标回收中的应用
2020-06-15 06:13:22林恩凡许江宁
导航定位学报 2020年3期
林恩凡,许江宁,安 文
改进蚁群算法在海洋信标回收中的应用
林恩凡,许江宁,安 文
(海军工程大学 电气工程学院,武汉 430033)
针对现有海洋信标的回收主要借助于经验或基于人工判断,导致浪费大量人力物力的问题,提出1种基于精英蚁群算法的信标回收方法:介绍蚁群算法模型,并在改进的精英蚁群算法基础上,根据航迹运动方程对航迹进行优化;然后通过实现航行器的自治或半自治的航迹规划,应用到海洋信标的回收中。实验结果表明:与传统算法相比,该算法具有路径短、收敛快、航迹平滑等优点,能有效指导航行器的定位,可以满足针对海洋信标回收的航迹规划的要求。
海洋信标;信标回收;航迹规划;精英蚁群算法;航迹优化
0 引言
海洋信标作为1种重要的海洋探测设备,通常搭载集成着很多造价昂贵的仪器仪表,能够广泛地应用到海洋测绘、船舶导航以及其他海洋研究中;不论是潜标还是浮标,其布放与回收都会耗费大量的人力物力[1-4]。针对信标的回收问题,研究合适的算法进行航迹规划,能够提高海洋信标的回收效率,节省大量人力物力。
航迹规划是按照一定的方法和评价标准,去寻找1条或多条从起始状态到目标状态的最佳路径[5-9]。主要环节包括环境建模、航迹搜索和生成、航迹优化和平滑3个部分。
文献[1]设计并建立了南海浮标管理信息系统;文献[2]对沿海和近海的海洋浮标抛投与回收方式、作业方式进行了论述;文献[3-4]基于北斗卫星导航系统(BeiDou navigation satellite system, BDS),研究了信标回收的机制;文献[10-12]对浮标、潜标的回收机制和搜寻定位设备进行了研究。目前针对海洋信标回收的研究主要集中在设备、抛投与回收方式、信标布放位置信息的管理,而在信标回收的问题上,往往借助经验或者基于人工判断去规划回收,这会浪费大量的人力物力。针对该问题,本文提出1种基于精英蚁群算法的航迹规划方法,并根据航迹运动方程对航迹进行了优化平滑。
1 算法数学模型

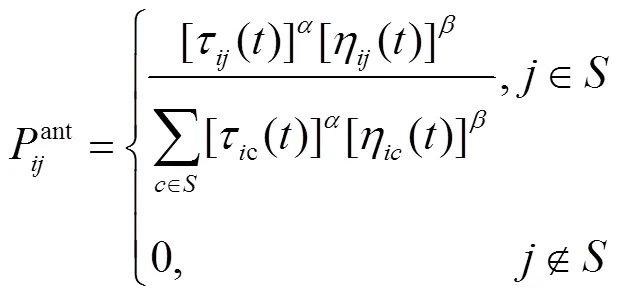



蚂蚁ant在信标与信标之间释放的信息素浓度模型为


2 改进精英蚁群算法
在传统蚁群算法中,当所有的蚂蚁都经历完1次迭代后,才会更新信息素,所有蚂蚁的信息素都会参与到信息素的更新中,这会导致某些寻找到非常长路径的蚂蚁,对整个蚁群的路径搜索产生误导,导致算法收敛速度变慢,甚至影响路径的最终收敛值。精英蚁群算法是在传统蚁群算法上,对信息素分配机制进行改进,将每次迭代搜索中,搜索出的最短路径对应蚂蚁的信息素给予额外增强,对行程加权,这有助于算法收敛[15]。
改进模型为:


规划的航迹中,通常会出现大角度直接转向航迹,这种折线航迹对低速与零转向半径的航行器而言可以使用;而实际上,大型船舶在转向过程中,其航迹绝不允许出现大角度折线的[16]。所以需要对精英蚁群算法规划出的航迹进行优化,以避免折线出现,如图1所示,经过优化平滑后的航迹更适用于航行器的运动。
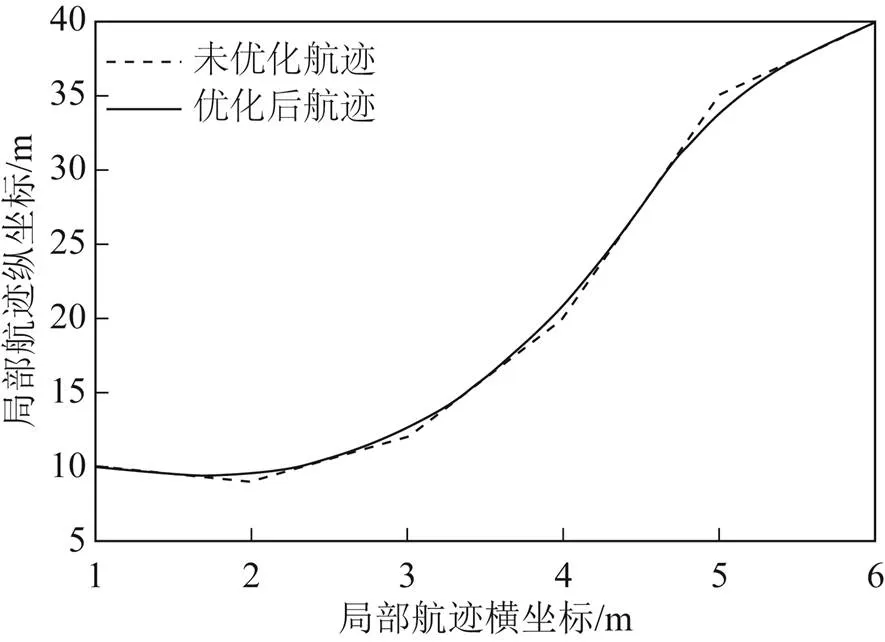
图1 航迹优化原理
图2给出了本文提出的改进蚁群算法的运行流程。

图2 算法步骤
运用改进蚁群算法进行海洋信标回收的流程为:
1)通过卫星定位数据进行海洋信标位置的键入,构建环境空间;
2)初始化蚁群算法相关参数;
3)构建蚁群算法的解空间,包括所有路径、起始点、终点等;
4)执行算法,搜索最优路径,并记录蚂蚁的信息素浓度;
5)根据公式更新蚂蚁的信息素,并进行局部搜索判断是否达到目的;
6)判断迭代次数是否达到初始参数预设,若达到则输出最优解,若否,返回4);
7)根据最优解的航迹运动方程,进行航迹的优化。
3 实验与结果
仿真实验在20 m×20 m的范围内随机生成20个模拟信标点,且尽可能保证分布不均匀和有较多路径选择。设算法中蚂蚁数量为40,信息素重要程度为1,启发函数重要程度因子为5,信息素的挥发程度参数为0.1;预设常数为1,迭代次数为100。仿真在Windows 8.1系统、MATLAB2014b、Intel Core i5-4200H CPU2.80GHZ(2CPUs)、内存8 GB、64位操作系统环境下进行。
图3、图4分别给出了传统蚁群算法航迹规划结果和本文改进蚁群算法航迹规划结果。本文算法和传统算法的最短路径长度分别为84.0764和87.1685 m,在如图3、图4所示的场景下可优化3.0921 m的距离。改进算法最短路径:14→5→12→11→10→13→9→8→6→7→18→17→15→16→19→20→3→ 2→4→1→14,传统算法最短路径:19→16→17→15→12→11→10→13→9→8→6→ 7→18→20→3→ 2→ 4→14→ 5→1→19,有效避免重叠路径的出现。图5给出了改进算法和传统算法路径距离与迭代次数关系。

图3 传统算法仿真结果
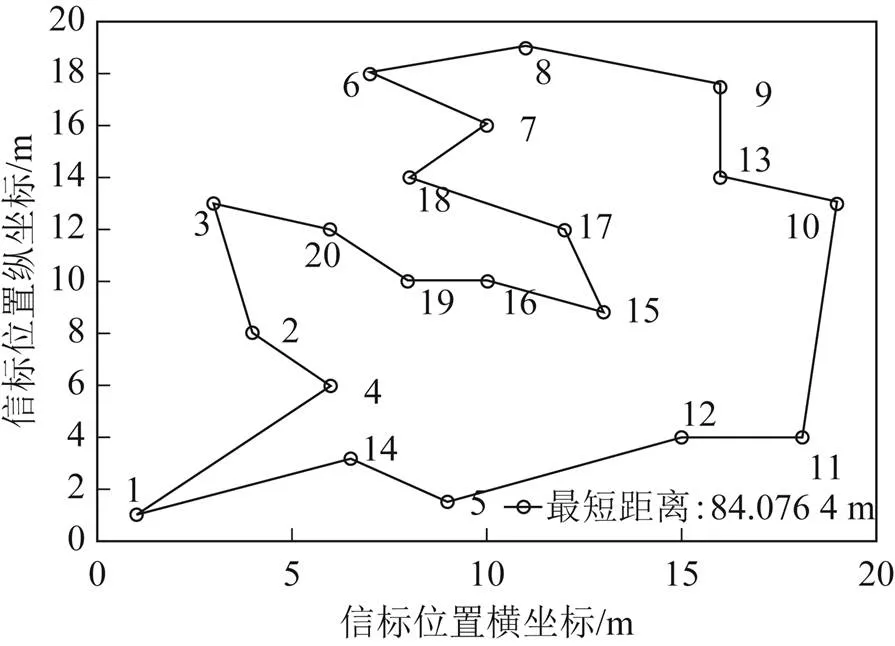
图4 改进算法仿真结果
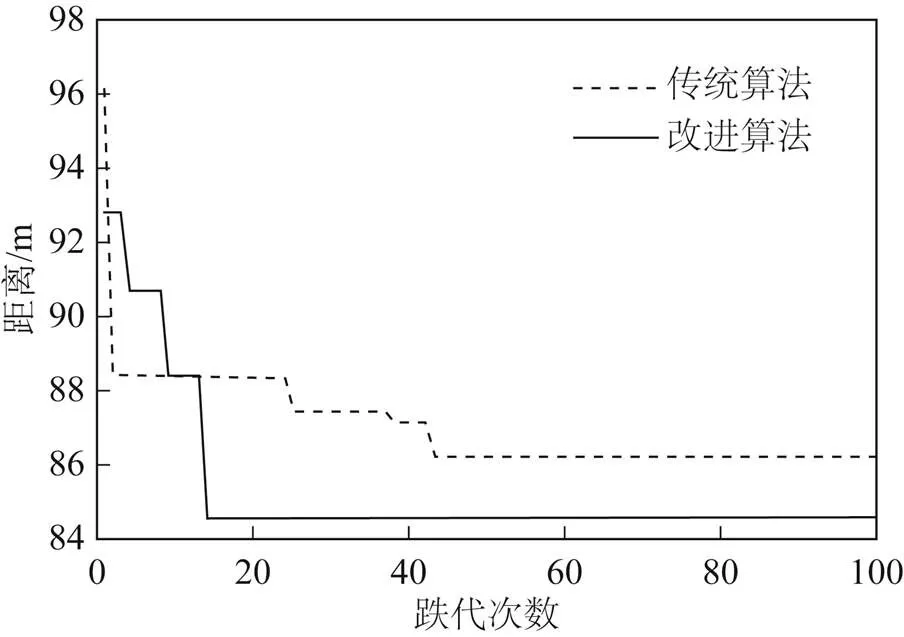
图5 迭代对比结果
从图5可以看出,传统算法和改进算法收敛时的迭代次数分别为14和42,在百次迭代情况下,改进算法的收敛速度对比传统算法的收敛速度可提升百分之66 %。综合图3~图5的实验结果可以看出,本文算法相对于传统算法的航迹规划结果,在路径长度和迭代收敛速度上都具有明显优势。规划航迹进行优化平滑后的结果如图6所示。对比图6和图4可以看出,优化后路径几乎没有折线路径出现,更适合航行器的实际航行。
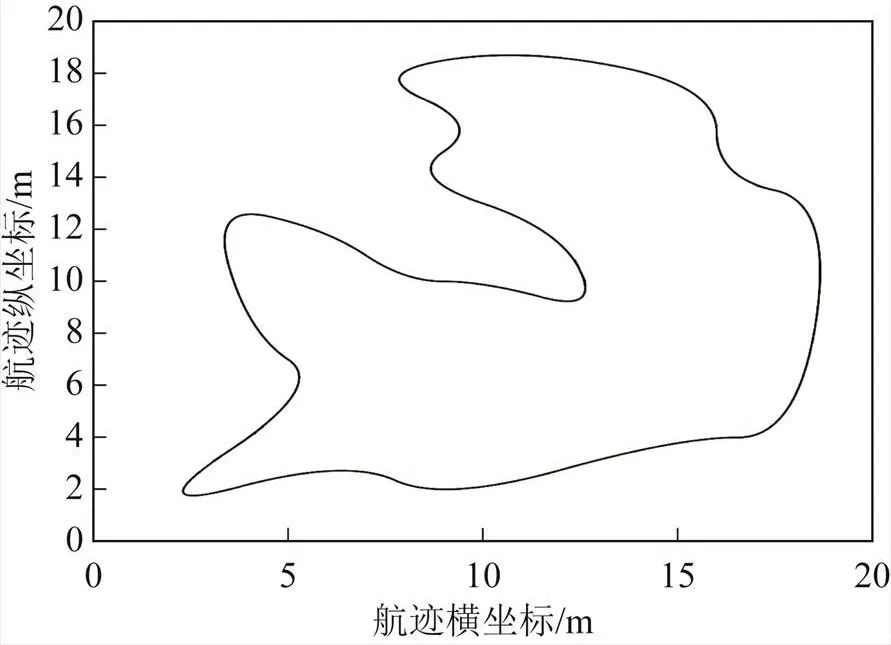
图6 优化后的路径
以上分析表明,本文提出的优化路径的精英蚁群算法,可以有效地提高海洋信标布放和回收的效率。
4 结束语
本文为弥补海洋信标布放和回收的全局规划不足,提出利用优化路径的改进精英蚁群算法进行航迹规划,通过分析传统蚁群算法的数学模型和航迹模型后,提出相应的改进方案:通过引入“精英蚂蚁”这一概念,优化了信息素更新策略,改进了航迹运动方程,这使得航迹更平滑,更适合航行器的实际航行。仿真实验表明:该方法具有较强的稳定性,可以满足海洋信标布放与回收航迹规划的要求,能有效地指导航行器的导航与定位。
[1] 周保成, 张金尚, 王研, 等. 南海浮标管理信息系统的设计与实现[J]. 科技风, 2019, 32(24): 100.
[2] 董林根. 浅谈大型海洋浮标抛设回收作业[J]. 珠江水运, 2012(19): 83-85.
[3] 张鹏鹏. 基于北斗通信与定位的深海回收信标系统研制[D]. 杭州: 杭州电子科技大学, 2018.
[4] 张炳洋. 北斗卫星定位系统在海洋信标回收中的应用[C]//中国高科技产业化研究会智能信息处理产业化分会、中国高科技产业化研究会信号处理专家委员会. 第十一届全国信号和智能信息处理与应用学术会议专刊. 北京: 中国高科技产业化研究会, 2017: 249-252.
[5] 刘潮东. 水下信号处理与航行器路径规划方法[D]. 西安: 西北工业大学, 2006.
[6] TAN L, JIANG J. Adaptive volterra filters for active control of nonlinear noise processes[J]. IEEE Transactions on Signal Processing, 2001, 49(8):1667-1676.
[7] SUN X, KUO S M, MENG G. Adaptive filtering of stable processes for active attenuation of impulsive noise[C]//The Institute of Electrical and Electronic Engineers(IEEE). Proceedings of 1995 International Conference on Acoustics, Speech, and Signal Processing(ICASSP-95). Detroit, Michigan: IEEE, 1995: 26-32.
[8] WU L, HE H, QIU X. An active impulsive noise control algorithm with logarithmic transformation[J]. IEEE Transactions on Audio, Speech and Language Processing, 2011, 19(4):1041-1044.
[9] LU L, ZHAO H. Adaptive volterra filter with continuous lp-normusing a logarithmic cost for nonlinear active noise control[J]. Journal of Sound and Vibration, 2016, 364: 14-29.
[10] 王瑛. 基于STM8L的潜水信标水面无线搜寻装置的设计[C]//中国高科技产业化研究会智能信息处理产业化
分会. 第九届全国信号和智能信息处理与应用学术会议专刊. 北京: 中国高科技产业化研究会, 2015: 172-175.
[11] 侯彬, 曾钕钋, 高剑, 等. 信号浮标布放回收装置研制[J]. 机械与电子, 2014(6): 72-75.
[12] 周光辉. 深海设备回收无线信标机研制[D]. 杭州: 杭州电子科技大学, 2014.
[13] 司守奎, 孙玺菁. 数学建模算法与应用[M]. 北京: 国防工业出版社, 2011.
[14] MARCO D, CHRISTIAN B. Ant colony optimization theory: a survey[J]. Theoretical Computer Science, 2005, 344(2/3): 243-278.
[15] 刘学芳, 曾国辉, 刘瑾. 基于改进蚁群算法的机器人路径规划算法[J]. 传感器与微系统, 2019, 38(10): 129-131, 138.
[16] 荣少巍. 基于改进A*算法的水下航行器自主搜索航迹规划[J]. 电子科技, 2015, 28(4): 17-19, 22.
Application of improved ant colony algorithm in ocean beacon recycling
LIN Enfan, XU Jiangning, AN Wen
(College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China)
Aiming at the problem that it is maily with help of experience or artificial judgment for current recovery of marine beacons, leading to a huge waste of manpower and material resources, the paper proposed a recovery method of marine beacons based on elite ant colony algorithm: the model of ant colony algorithm was introduced, and the track was optimized according to the track motion equation based on the modified elite ant colony algorithm; then the autonomous or semi-autonomous track layout of the aircraft was realized and applied to the recovery of marine beacons. Experimental result showed that the proposed method would have shorter path, faster convergence and smoother track than traditional methods, which could effectively guide the navigation and positioning of the aircraft, meeting the basic requirements of the track planning for marine beacon recycling.
marine beacon; beacon recycling; track planning; elite ant colony algorithm; track optimization
P228
A
2095-4999(2020)03-0053-05
林恩凡,许江宁,安文. 改进蚁群算法在海洋信标回收中的应用[J]. 导航定位学报, 2020, 8(3): 53-57.(LIN Enfan, XU Jiangning, AN Wen.Application of improved ant colony algorithm in ocean beacon recycling[J]. Journal of Navigation and Positioning, 2020, 8(3): 53-57.)
10.16547/j.cnki.10-1096.20200308.
2019-12-02
国家重点研发计划项目(2016YFB0501700,2016YFB0501701);湖北省基金资助项目(2017CFC865)。
林恩凡(1997—),河北石家庄人,硕士研究生,研究方向为惯性导航技术。
许江宁(1964—),江西九江人,博士,教授,研究方向为惯性导航技术。
猜你喜欢
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
青年歌声(2019年12期)2019-12-17 06:32:32
铁道通信信号(2018年3期)2018-04-19 02:32:56
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
中学生英语(2017年6期)2017-07-31 21:28:55
青年歌声(2017年6期)2017-03-13 00:57:56
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
长春理工大学学报(自然科学版)(2015年4期)2015-12-07 06:57:06
舰船科学技术(2015年8期)2015-02-27 15:38:47
水道港口(2015年1期)2015-02-06 01:25:45