面向HBT干涉定位的直线式传感阵列结构优化
2020-06-13 11:48刘梦然李善强
科学技术与工程 2020年13期
刘梦然,李善强,贾 雯,聂 磊
(湖北工业大学湖北省现代制造质量工程重点实验室,武汉 430068)
声学定位技术是声学、电学、信号处理等多门交叉学科的集成应用,广泛应用于军事、生活、工业检测等领域。目前,声学定位技术主要通过声传感器来获取声源信号,对采集的声源信号进行处理,从而确定声源的位置。声学定位的方法可以归纳为以下三类:基于到达时差法[1]、可控波束形成定位法[2-3]、基于声压幅度比定位法[4]。相比后面两类定位方法, 基于到达时差法的定位技术具有结构简单、计算量小等优点,应用较为广泛[5]。特别对于到达时差法,可基于光场HBT(Hanbury Brown and Twiss)干涉原理进行声场干涉目标定位,这种方法考察了信号之间的相关性,可排除无内禀相干性的干扰信号,因此能够实现在低信噪比情况下低频信号的远距离准确定位[6]。
经典的声传感器定位阵列拓扑结构有直线阵、十字阵、圆形阵和L型阵等结构。从几何上看,这些经典拓扑结构都可以看作直线阵列的延伸,而且直线阵具有加工简单、收放便利的优点,非常适合于各种载具的实际应用,因此直线阵列拓扑结构的研究具有非常重要的意义。现今众多学者针对定位传感阵列冗余问题开展了阵列优化研究[7-13]。
基于声场HBT干涉定位方法,设计了一种优化算法,以对声源的定位误差范围在1%以内为目标,对八元直线传感阵列进行了拓扑仿真优化;通过实验检测,筛选出了满足实际应用的直线阵列。
1 声场HBT干涉定位原理
声场HBT干涉理论来源于光场HBT干涉[14-15],光的HBT干涉现象是由Hanbury Brown和Twiss在1956年提出的,测量恒星角直径的光强干涉仪即基于该原理设计而来。
实验室可见光波段的HBT实验原理图如图1所示。
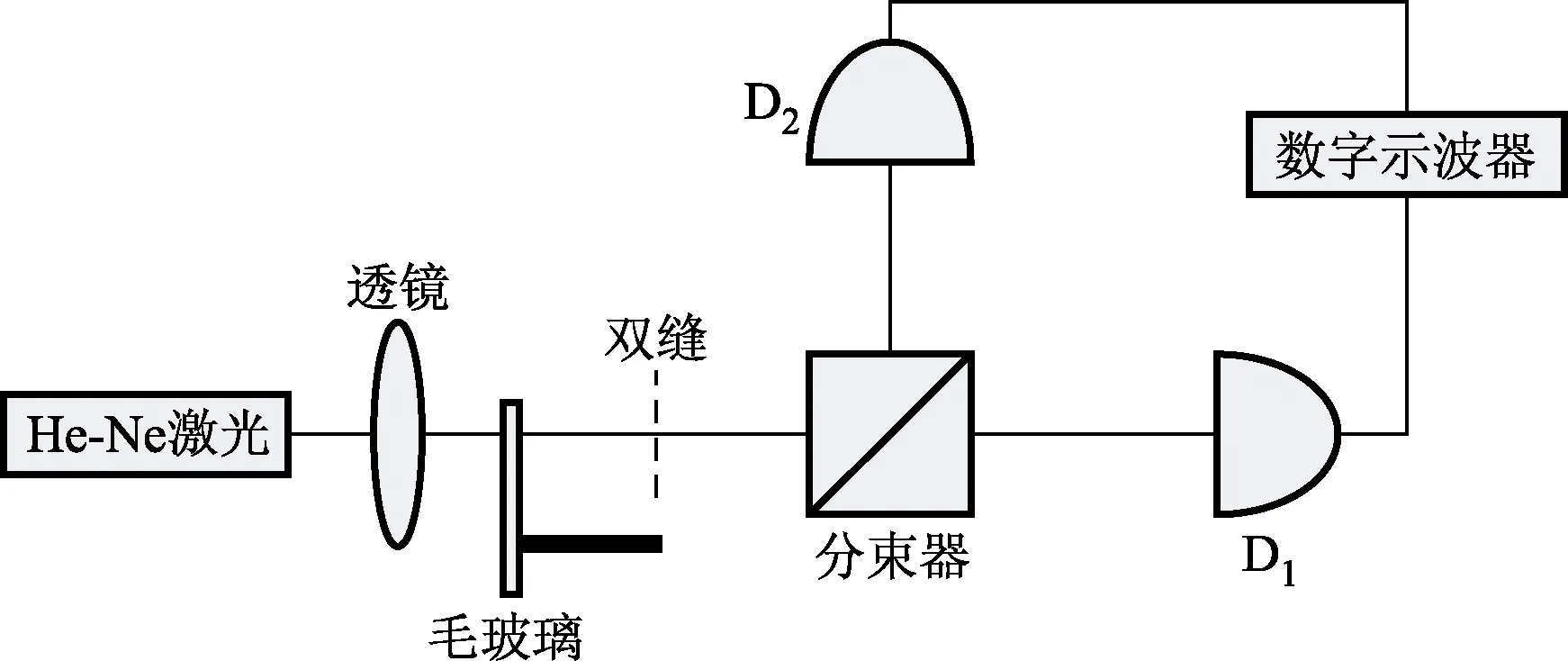
图1 可见光波段HBT实验原理图
He-Ne激光器发出激光经过旋转的毛玻璃,使其激光等效于一个空间波矢方向随机分布的热光源。通过一个双缝的光用一个50:50的分光镜分成垂直的两束光,用两个光电探测器采集光信号并进行强度测量。如若将D1探测器固定,然后对D2探测器进行横向扫描,从而通过数字示波器得到两个探测器光强值的强度归一化相关函数。
假设空间内以一个声源S作为坐标原点,同平面坐标系内存在声学传感器A和B,分别位于距离声源S半径为r1和r2处,传感器A和B接收声源发出的声波,接收信号分别为Q1(r1,t1)以及Q2(r2,t2),如图2所示。

图2 声场HBT干涉实验示意图
根据光场中可见光波段实验的相干光计算,将光学二阶相关函数的计算方法引入到声学定位,可以得到任意两个传感器之间的相关函数G:
(1)
(2)
对8个传感器从左至右进行1~8排序,则八元传感阵列的相关函数为
G=G12G13G14…Gij…G78
(3)
式(3)中:Gij表示第i个传感器与第j个传感器的相关函数。
根据光场干涉特性,当频率、相位相同时,两束光发生干涉,即出现明暗相间的条纹变化情况,且零级条纹光强最大。同理,同一个声源发出一列声波信号,传感器A与传感器B接收信号的相对时间差为0时,信号的相干性最强,即两个传感器相关函数最大。因此,可以得出,使式(3)中G达到最大的坐标点位置,即为声源位置。
2 阵列结构优化方法与仿真分析
建立直角坐标系,8个传感器分别等距离放置在X轴上,组成直线阵列,如图3所示。假设声源位置放置(5 m,20 m),运用MATLAB软件,通过直线阵列进行声源定位仿真模拟,通过扫描得到该扫描区域内所有相关函数,其中相关函数值最大的点即为声源坐标,如图4所示的八元阵列声源定位效果图,定位结果为(5 m,20 m),与所设置声源坐标一致。

图3 八元直线传感阵列
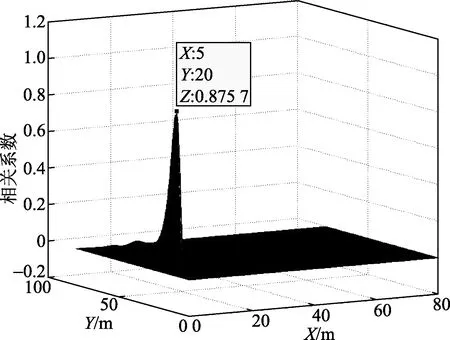
图4 八元阵列仿真定位结果图
根据本文所提出的以下优化算法对八元传感直线阵列进行优化,具体优化步骤如下:
(1)确立参数集。首先,采用二进制规则对阵元的存在状态进行编码,存在传感器为1,不存在传感器为0,例如10101000表示一、三、五这3个位置放置传感器。其次,根据声场HBT干涉定位原理,其至少需要3个传感器才能实现对声源的定位,则以传感器个数的不同在参数,建立传感器个数为3~7的5个优化阵列参数集。例如传感器存在个数为3的阵列如11100000、11010000、11001000等,放入第一个参数集。
(2)输出模型的确定。根据声场HBT干涉理论,以式(3)为目标输出模型,并计算其定位误差。
(3)停止条件确立。以传感器存在个数为3的参数集开始,依次对5个参数集进行仿真,得到每个阵列对应所定位出来的声源坐标。以阵列的定位误差在1%以内作为传统终止条件,当停止条件出现时,还需完成该参数集内剩下阵列的定位仿真。
(4)选出最优阵列。在满足阵列的定位误差在1%以内的参数集中进行筛选,选择出最优阵列。
(5)对最优阵列进行下一步验证,绘制出坐标与相关函数的仿真图像,观测其特征参数。
上述优化基本思想的具体流程如图5所示。
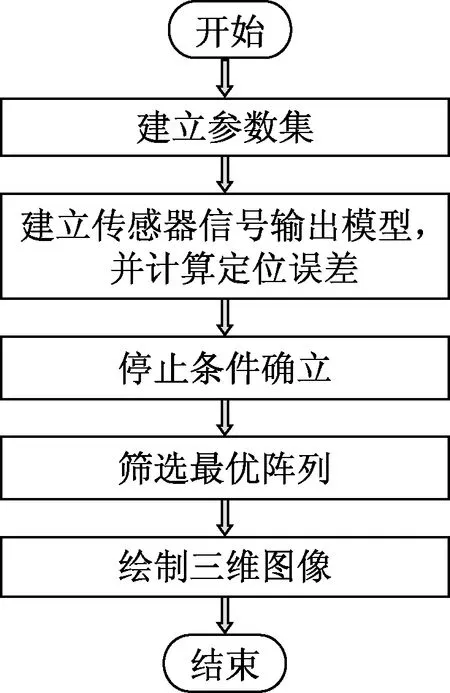
图5 阵列结构优化流程
根据阵列结构优化仿真,得到5种最优阵列分别为01100110、10100101、10101010、11000011、11001100,定位误差均为0.97%。其每种优化阵列对声源定位的三维仿真图如图6所示。
由以上仿真结果可以看出,优化后的5种四元传感阵列均可在减少传感器个数的前提下,满足定位误差在1%以内的定位效果。
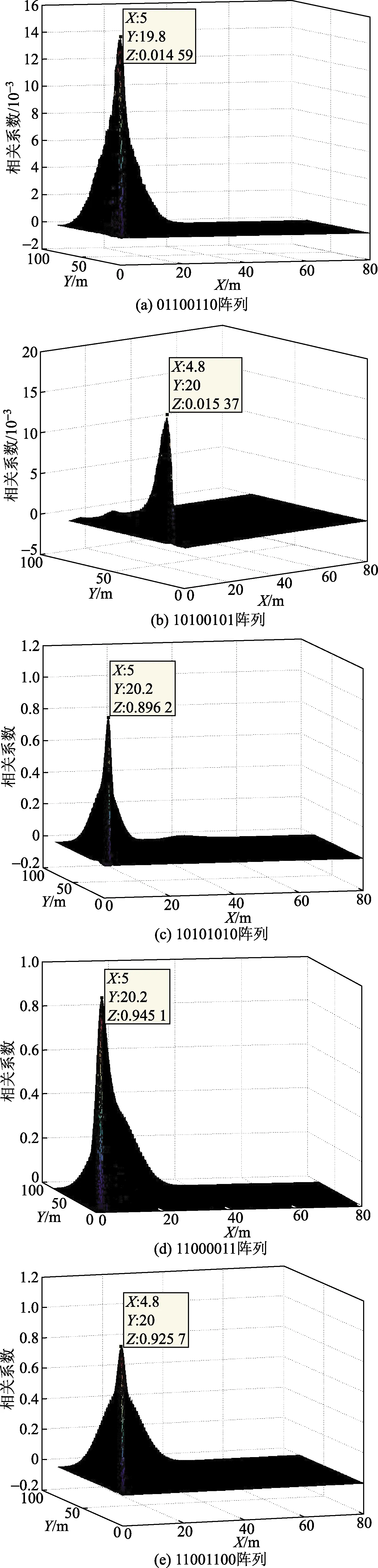
图6 最优阵列仿真定位三维图
3 阵列优化的测试实验及分析
对以上声源定位仿真得到的优化阵列进行实验验证,在实际测试中,八元直线阵列的声传感器以及声源摆放位置如图7所示,其中声源真实坐标为(5 m,20 m),采用八元直线阵列传感器所实现的定位效果如图8所示。从图8中可以得到定位的声源位置在(5 m,20.2 m),其定位误差为0.97%。

图7 声源定位实验图
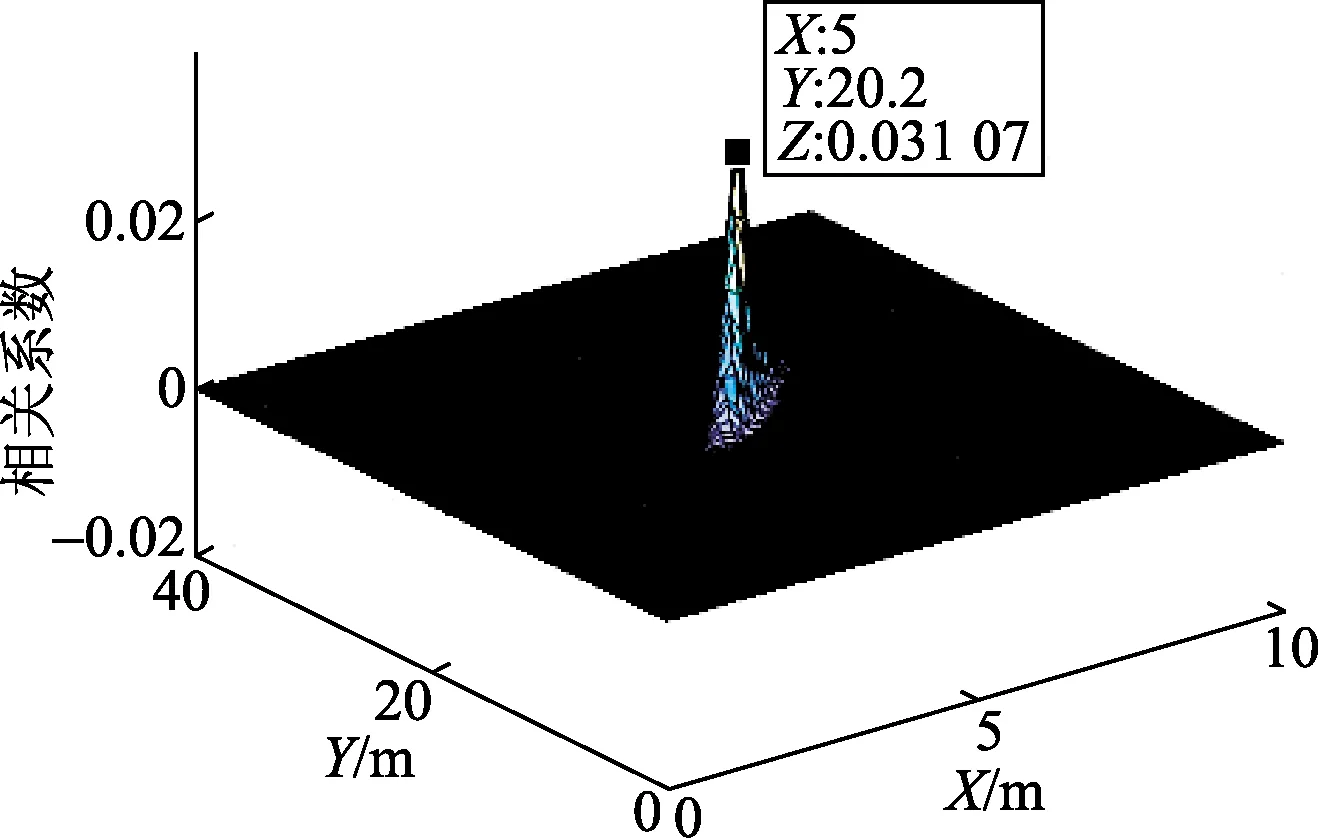
图8 八元直线阵列定位实验结果
在相同实验环境下,重复进行上述实验,然后分别提取阵列01100110、10100101、10101010、11000011、11001100相对应传感器的输出数据,得到声源定位结果如表1所示。选取定位实验结果与计算均值相一致的数据,绘制阵列声源定位图如图9所示。
通过仿真与试验的研究可以得到以下结果。
(1)定位实验中只有01100110与10101010这两种四元阵列定位误差小于1%,其结构示意图如图10所示。
(2)由于仿真的时候噪声设置为白噪声,并不能完全模拟真实噪声,因此,在实验的仿真得到5个四元拓扑结构,但经过实验检验后只有2个满足要求。
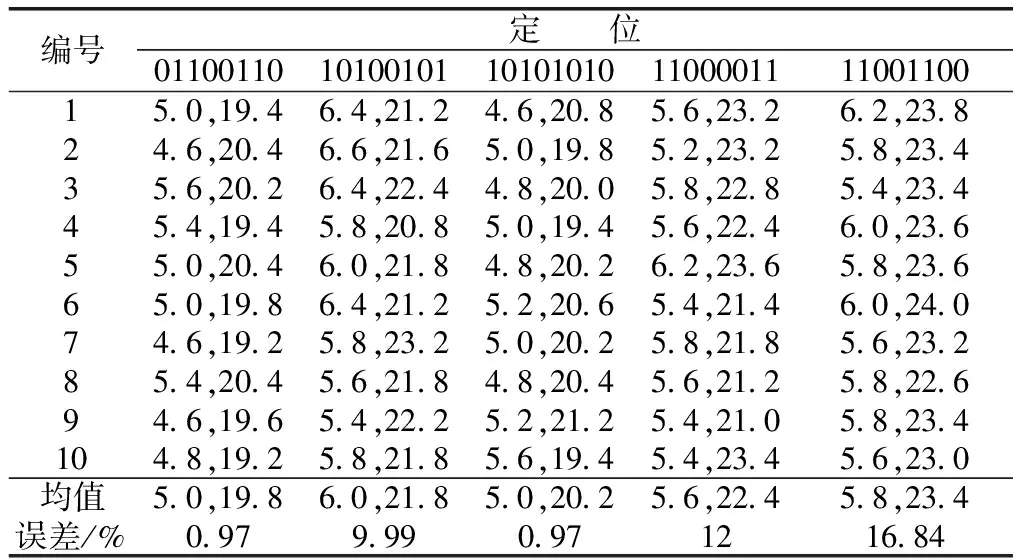
表1 实验结果
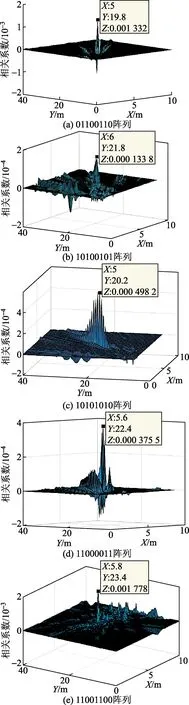
图9 最优阵列实验定位结果

图10 最优阵列结构示意图
(3)扫描步长为0.2 m,所以误差皆为0.2的倍数,可以通过减小扫描步长来进一步提高定位精度。
(4)下一步将进行定位误差分析,寻找影响定位的各个误差源,分析误差服从的分布规律,得出定位的测量不确定度。
4 结论
为消除声源定位直线阵列中的冗余阵元,精简阵列结构而不影响定位精度,开展了基于HBT干涉定位的直线阵列优化研究。基于HBT干涉定位原理建立仿真定位模型,对阵列进行编码优化仿真,得到声学定位性能最优的5个直线传感阵列。并通过定位实验对所得四元优化阵列进行验证,结果表明有2个四元直线阵列的定位结果在设定误差范围内,基本达到与八元直线阵列一致的定位性能。研究结果将有效减小定位系统体积、优化阵列结构和提高定位效率。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
舰船科学技术(2022年11期)2022-07-15
中国测试(2022年1期)2022-02-23
铁道通信信号(2020年12期)2020-03-29
中国舰船研究(2019年2期)2019-04-20
电子制作(2019年23期)2019-02-23
家庭影院技术(2018年11期)2019-01-21
电子制作(2018年23期)2018-12-26
家庭影院技术(2018年10期)2018-11-02