
利用声压有效值信息进行白噪声声源识别
2022-02-23 10:26罗瀚波赵晓丹周海川赵秀亮
中国测试 2022年1期
罗瀚波,赵晓丹,周海川,赵秀亮
(江苏大学汽车与交通工程学院,江苏 镇江 212013)
0 引 言
近年来随着计算机计算能力与信号处理技术的不断进步,基于传声器阵列信号处理的声源识别方法[1-3]取得了较大发展,其中主要包括波束形成方法[4-6]与近场波束形成技术[7-8],传统波束形成通过对信号进行相位对齐与累加求和来判断声源位置,近场声全息需要使用阵列在近场测量声全息信息,经声场空间变换实现声场重建与正向预测,以上两种方法在计算过程中都需要用到声压相位信息,在工程实践中存在声源辐射白噪声信号的情况,对其诊断是有需求的,白噪声[9]是不相干的信号,没有相位,无法使用基于声信号相位的声源识别等方法进行识别,目前国内外针对此类白噪声的声源识别研究少,尚未看到文献报道。
本文提出利用声压信号有效值进行内积运算识别白噪声声源,以典型的球面波声源[10]为对象,分析推导利用声压信号有效值识别白噪声的方法,继而建立声源识别步骤,首先研究对单个声源的识别,继而研究多个点源的识别,通过仿真计算与实验对本方法进行验证。
1 理论分析与识别步骤
本文以球面波为例来进行声源识别研究。假设在阵列面的上方空间内存在一个辐射白噪声的球面波声源 S,示意图见图1,球面波声源 S的声压信号有效值P与传播距离满足如下关系:

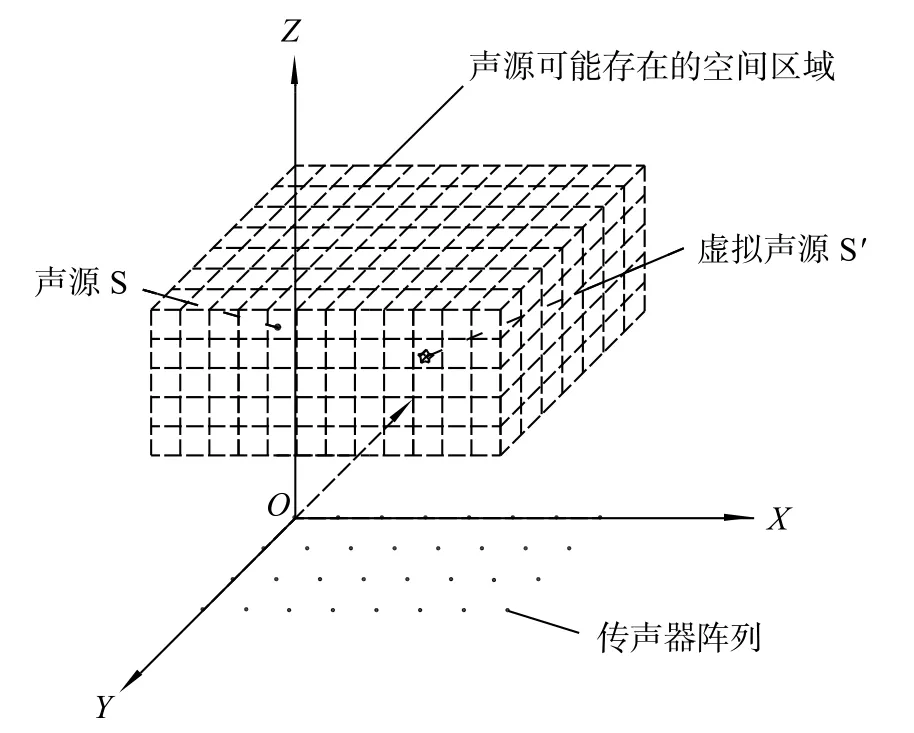
图1 利用声压有效值进行声源识别示意图
式中:Q——声源强度;
r——接收点到声源的距离。

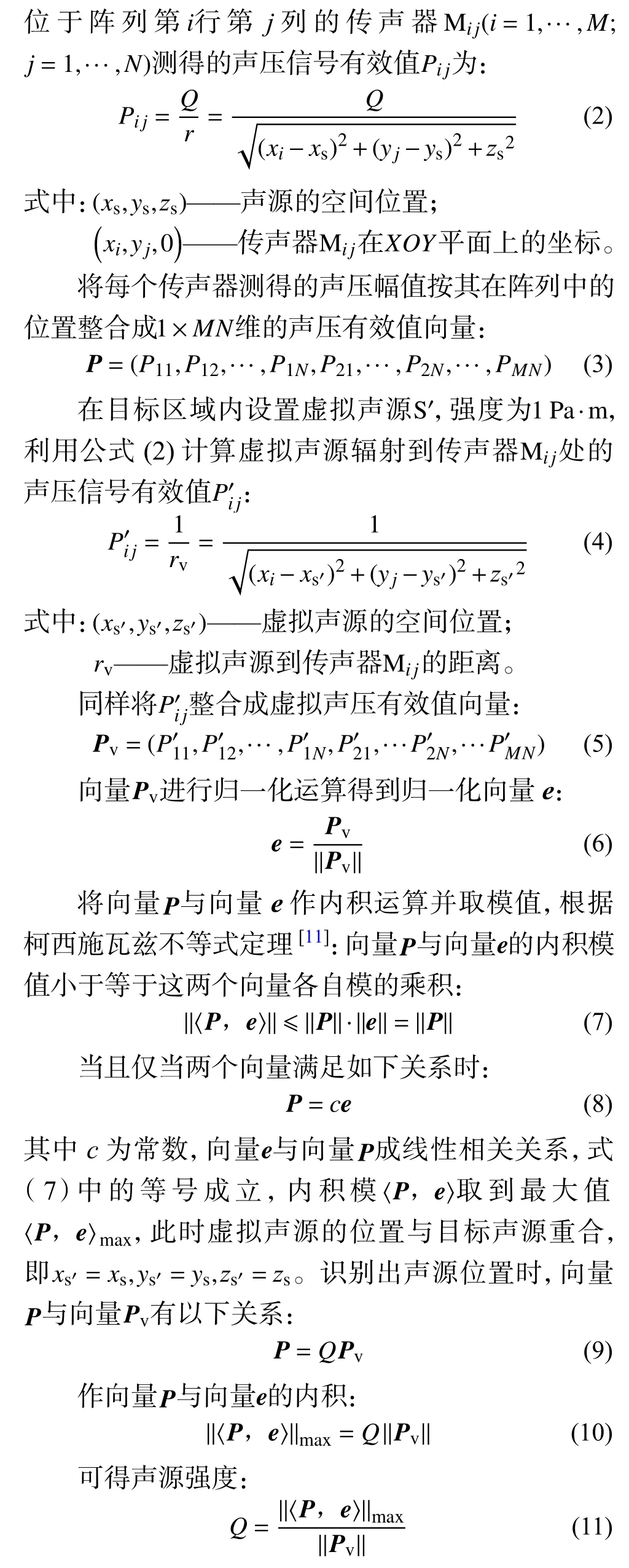
基于以上理论分析进行声源识别,建立识别步骤,绘制识别步骤流程图如图2所示。
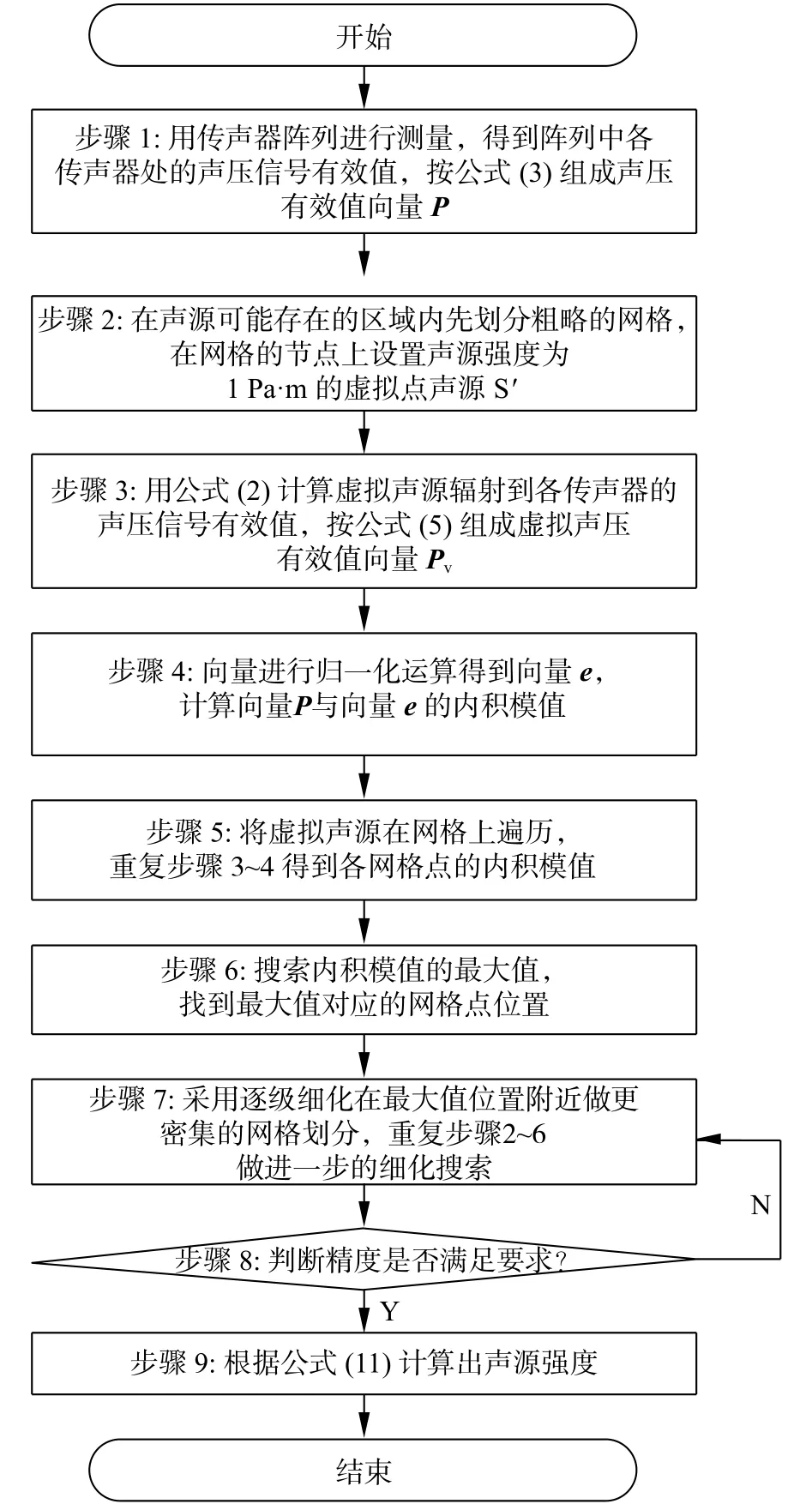
图2 识别步骤流程图
2 单个白噪声声源识别
首先对单个辐射白噪声的点声源进行识别。
设声源面距离测量面1 m,声源理论位置为(0.6359,0.5688)m,声源辐射强度为6 Pa · m的白噪声。使用11×11的传声器阵列进行测量,传声器间距为0.1 m×0.1 m。观察声源面上内积模值的分布情况,如图3所示,内积模值最大值处与声源位置基本一致。
图3 声源面上内积模值分布图
使用前面的步骤进行识别,识别结果见表1。可以看出,该方法识别出的声源位置与强度准确。使用本文方法可以准确识别出声源面上的单个白噪声声源。
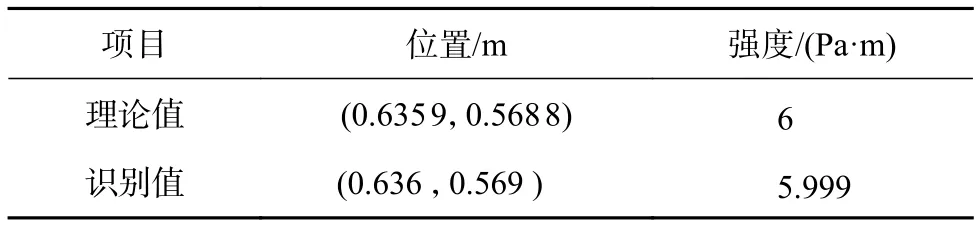
表1 平面上点声源识别结果
在工程中测量白噪声信号有效值时会存在误差,前面没有考虑这种误差的影响。下面考虑测量误差和测量距离的影响,将前面算例中声源与测量面之间的距离设为 0.5 m、1 m、2 m、5 m,同时在向量P中加入15 dB随机噪声模拟测量误差对声压有效值的干扰,观察此时的识别情况,结果如表2所示。
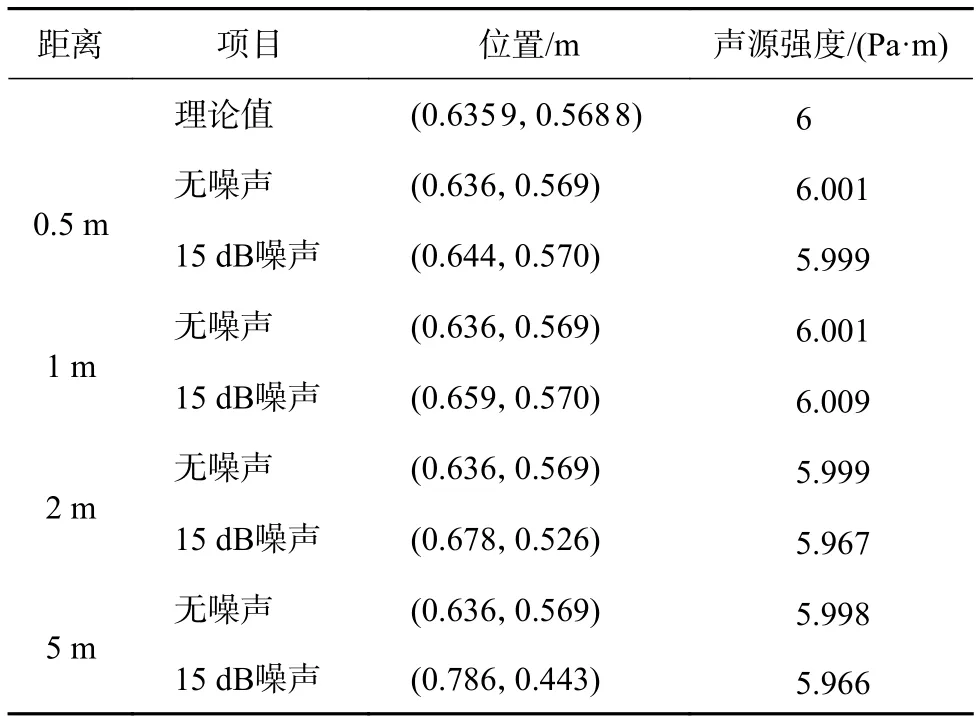
表2 识别距离与测量误差对识别效果的影响
从表2可看出:不考虑测量误差,测量距离远、近都可以做到准确识别。加入干扰噪声后,测量距离为0.5 m、1 m时的识别误差小,测量距离增大到2 m时误差增加,当测量距离增大到5 m时,识别误差大,这是由于当声源与测量面之间的距离很大时,各测量点处声压有效值的差异很小,容易受到噪声干扰的影响,导致识别结果出现大的偏差。
由于本文方法不使用相位信息,因此在传声器布置时有一个便利:不需要考虑传声器布置间距的限制[12],针对测量距离增大后识别误差大的情况,可以通过调整阵列中各传声器之间的间距增大来改善识别效果,将仿真算例中传声器之间的间距增大到0.3 m,干扰噪声仍然是15 dB,声源面与测量面之间的距离是5 m,声源识别结果如表3所示。
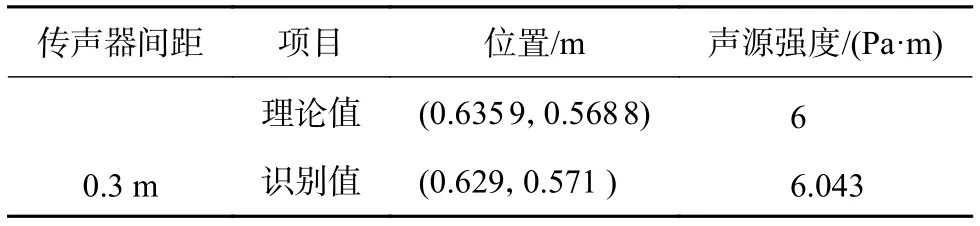
表3 传声器间距对识别效果的影响
由表3可知,当传声器间距增大后,识别结果准确。
前面分析的是平面上的白噪声声源识别,下面用该方法对空间中的点声源进行识别。设声源位于 1 m×1 m×1 m 的空间区域内,传声器阵列与识别区域下表面之间的距离是0.2 m,声源理论位置为(0.5356,0.4685,0.7354) m,声源辐射白噪声的强度为6 Pa · m,同时观察噪声影响,用15 dB的随机信号模拟测量误差对声压有效值的干扰,识别结果如表4所示。
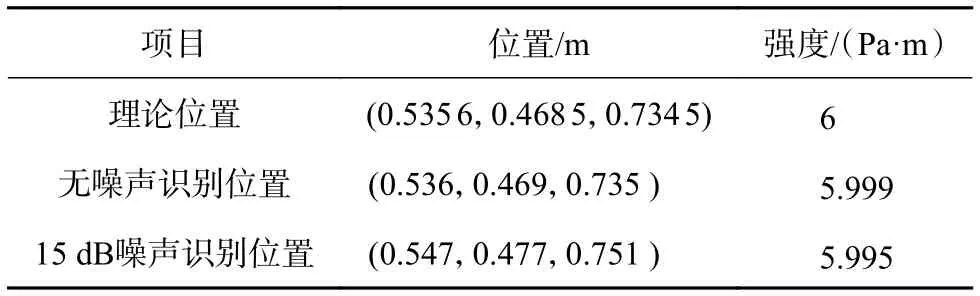
表4 空间中白噪声声源识别结果
由表4可知,在信噪比为15 dB的情况下,识别出的声源位置与强度与理论值之间出现一定偏差,但在工程测量可以接受的范围之内。
3 多个白噪声声源识别
设声源面上存在两个辐射白噪声的声源 S1与 S2,强度分别为 2 Pa·m 和 4 Pa·m,对应的声源间距为0.6 m、0.4 m、0.2 m,声源 S1与 S2的具体位置见表5,利用迭代方法进行识别,迭代10次后识别结果如表5所示。
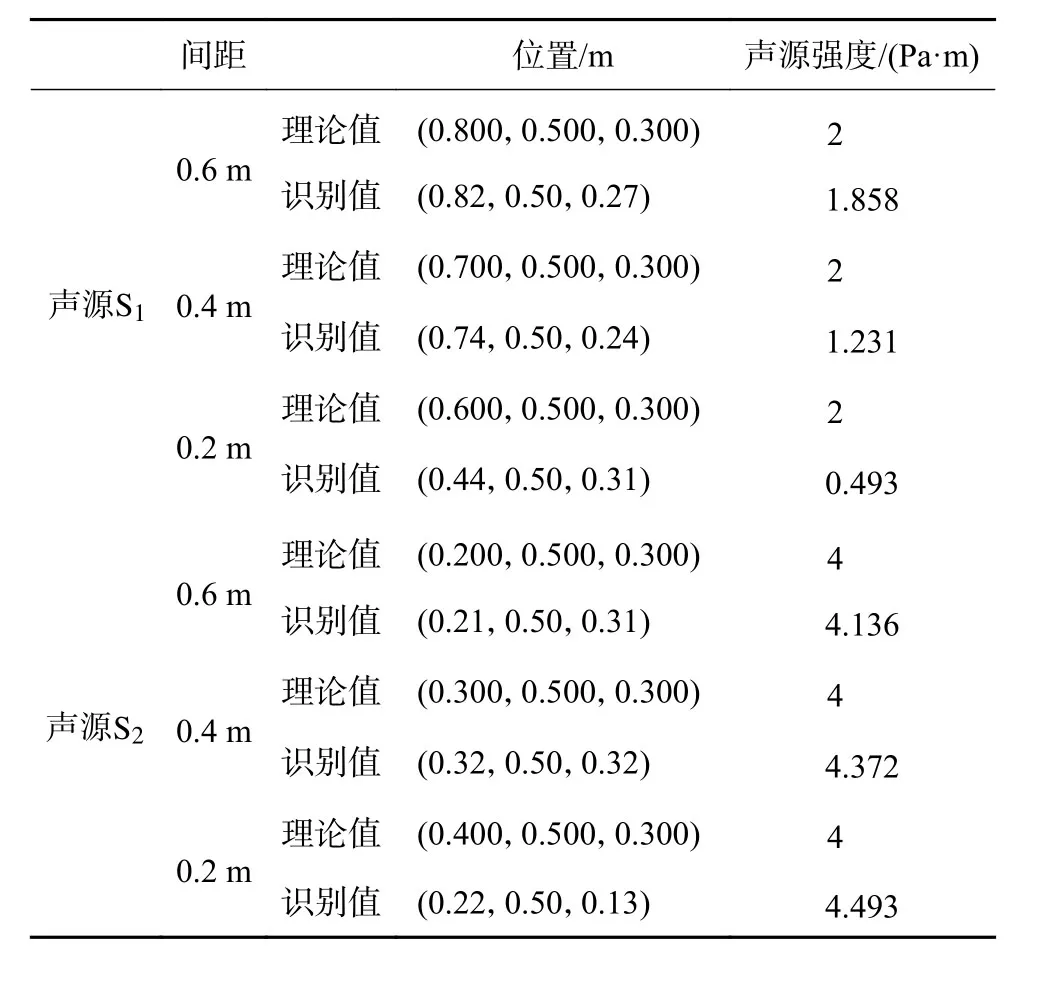
表5 声源间距对循环迭代识别多点声源的影响
由表5可知,当声源间距为0.6 m时,循环迭代10次可以较准确地识别出声源信息;当声源间距等于0.4 m时,迭代10次后的声源识别结果有一定误差;当声源间距等于0.2 m时,迭代10次后的声源识别结果偏差很大,这是因为当声源位置十分接近时,声源之间互相干扰严重,使得无法识别。
下面使用本文方法结合施密特正交对距离较近的两点声源进行识别,设声源面距离测量面1 m,声源面上存在两个声源S1与S2,声源强度分别为2 Pa·m和4 Pa·m,将声源 S1与 S2之间的距离分别设为0.2 m和0.1 m,;两个声源的具体坐标见表6。使用11×11的传声器阵列进行测量,传声器间距为0.1 m×0.1 m,识别结果如表6所示。
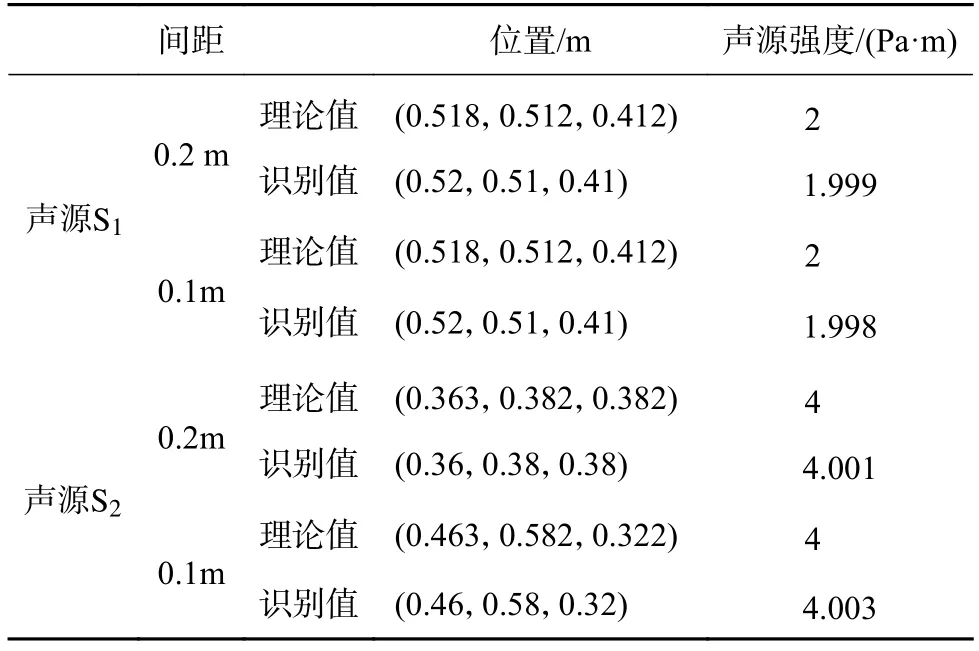
表6 利用施密特正交识别多点声源结果
从表6中可以看出,在两种声源间距的情况下,该方法识别出的声源位置与声源强度均准确。使用施密特正交消除了声源之间的相互干扰,即使在声源之间距离较近时,也能取得良好的识别效果。
为了考察测量误差产生噪声对多点声源识别的影响,在向量P1,P2加入信噪比为15 dB的干扰噪声,观察加入噪声以后的识别结果,声源之间的距离是0.1 m。
由表7可知,测量误差带来的噪声干扰对识别结果产生了一定影响,但仍然可以做到有效识别,因为施密特正交本质上是一种内积运算,具备一定的抗干扰能力,因此即使在距离0.1 m的情况下,也可以消减相互干扰,进行多点声源的准确识别。
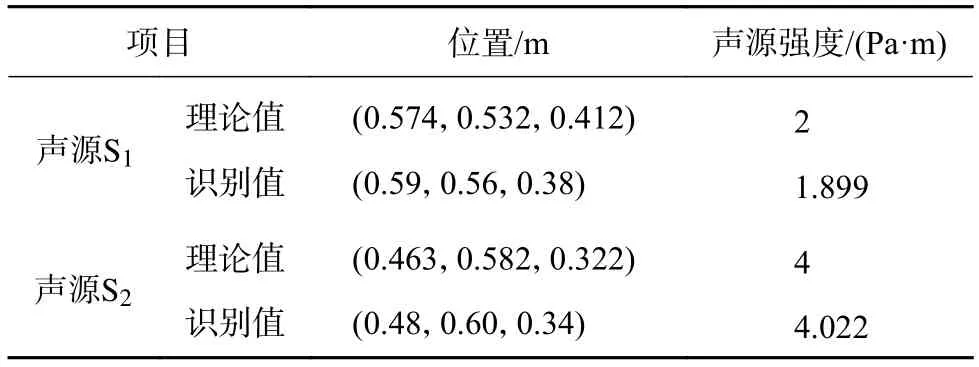
表7 噪声干扰对识别两点声源的影响
4 实验验证
在半消声室内进行实验,实验装置的示意图与现场照片如图4和图5所示,球声源球心与阵列之间的距离为 1 m,球声源的空间坐标是(1.10,0.45,1.00) m。使用YG201型传声器组成的4×8通道阵列进行测量,传声器间距为 0.3 m×0.3 m。控制OS003型无指向型球声源产生白噪声信号,使用信号采集系统进行采集,采样频率为51200 Hz。在开始识别声源前,选择阵列中3个典型位置的传声器,一个位于阵列中部,传声器序列号为 M34;两个位于传声器阵列边角,传声器序列号为 M18和 M41,3个传声器测得的声压信号有效值分别为 0.1241 Pa 、0.0801 Pa 和 0.1042 Pa,根据球面波辐射关系公式(2)分别计算出声源强度并取平均,获得声源强度Q为 0.1291 Pa·m,将此声源强度值作为标准与识别声源强度进行对比。
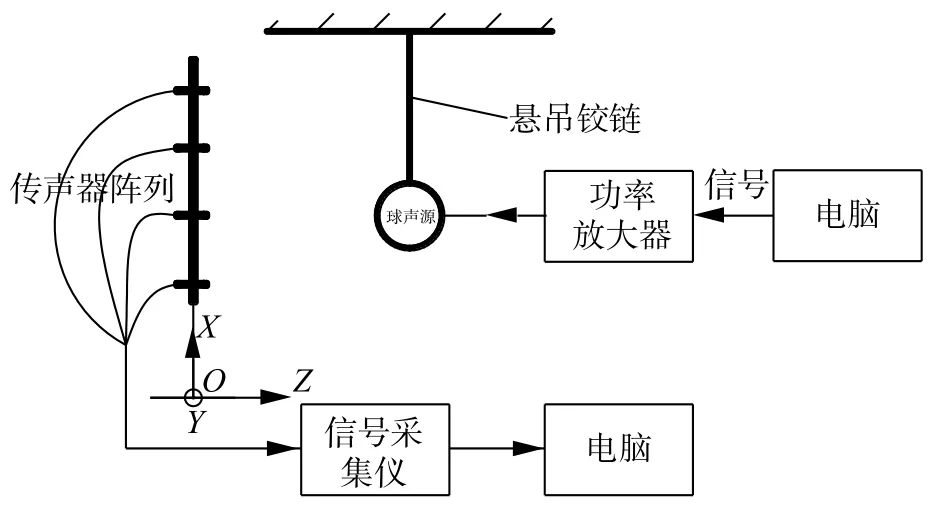
图4 声源识别装置示意图

图5 实验现场照片
对辐射白噪声的球声源进行识别,观察距离阵列1 m平面上的内积模值分布情况见图6,可以看到峰值位置出现在声源位置附近。识别出声源位置后,由公式(11)计算得到声源强度,声源识别实验结果如表8所示。
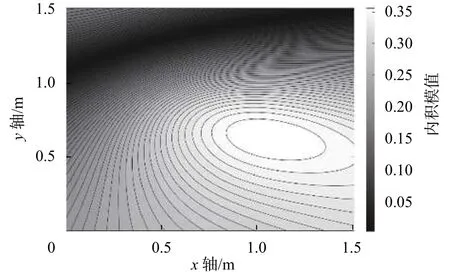
图6 内积模值等值线图
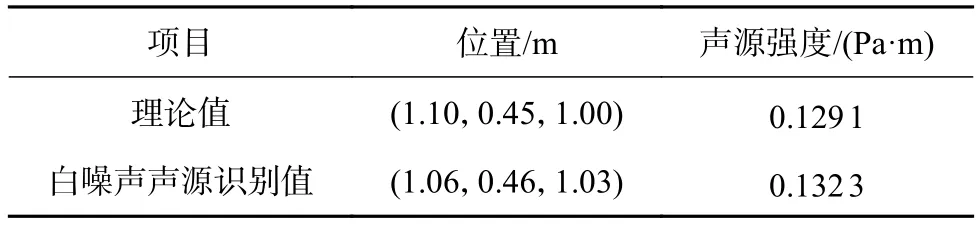
表8 点声源识别实验结果
由表8的识别结果可看出,沿各坐标轴方向的识别误差均小于0.05 m,声源强度误差为2.47%,识别出了白噪声声源的位置与强度。
5 结束语
1)辐射白噪声的声源没有相位信息,无法用波束形成方法进行识别,本文提出一种利用声压有效值信息进行声源识别的方法,建立了相应的识别步骤。
2)利用本文方法对点声源进行识别,在没有噪声干扰的情况下,测量距离远近都可以准确识别,考虑测量误差后,有噪声干扰,测量距离远时的识别结果误差大,可以通过增大传声器之间的间隔提高识别精度。
3)当声源间距较远时,利用本文方法结合迭代可以进行多点声源的识别;当声源间距较近时,提出引入施密特正交方法来消除声源之间的干扰,可以准确识别出各声源信息。
4)在半消声室内用OS003型球声源辐射白噪声信号,使用本文方法对声源位置和强度进行了识别,验证了该方法的有效性。
5)本文方法无需使用相位信息,阵列中各传声器之间间隔不受限制,测试过程中无需进行相位匹配,测量方便,测试成本低。
猜你喜欢
压电与声光(2022年3期)2022-07-16
舰船科学技术(2022年11期)2022-07-15
现代电影技术(2021年11期)2021-12-27
兵工学报(2021年2期)2021-04-08
物理实验(2020年3期)2020-04-18
电子制作(2019年23期)2019-02-23
汽车工程(2018年12期)2019-01-29
电子制作(2016年19期)2016-08-24
演艺科技(2013年5期)2013-11-05
演艺科技(2013年2期)2013-09-19
