基于太阳角度的全自动海洋光谱采集控制系统研究
2020-06-12 04:37:46王章军禹定峰盖颖颖
海洋技术学报 2020年2期
杨 雷,王章军,禹定峰,盖颖颖,邓 伟
(齐鲁工业大学(山东省科学院)山东省科学院海洋仪器仪表研究所 山东省海洋监测仪器装备技术重点实验室国家海洋监测设备工程技术研究中心,山东 青岛 266001)
随着我国经济社会的发展,海洋事业的发展越来越迅速,尤其是近些年来,针对海洋方面的研究取得了很多突破性的进展。海洋水色反演对于研究海洋科学有着基础性的作用[1],尤其在海洋水体变化监测、海洋生态系统风险分析等方面起着不可替代的作用。通过传统的光谱采集来反演海洋水色三要素[2],需要人工进行光谱的采集测量,但是人工控制光谱采集很难进行长时间的连续有效测量[3-4]。全自动的海洋光谱采集系统成为一个急需解决的问题。
要实现海洋光谱采集的全自动控制,就需要对太阳角度进行自动识别跟踪,并调整仪器位置的功能。目前,对于太阳跟踪的研究有很多,包括太阳方位自动跟踪用于提升光伏发电效率[5]、太阳能集热效率[6]等。在太阳光谱的自动跟踪采集方面,李文伟等[7]做了太阳光谱辐照度仪自动跟踪装置的研究,陈晓宁等[8]进行了基于太阳跟踪的自动光谱采集系统研制,但这些都只是局限于太阳光谱的采集。对于海洋光谱自动采集系统的研究,比较有代表性的产品包括:加拿大Satlantic公司设计的HyperSAS海面高光谱仪测量仪、上海奕枫仪器设备有限公司设计的水面高光谱辐射自动云台测量系统[9]等。但这些系统并未实现海洋光谱采集的全自动化,无法根据太阳角度自动地调整仪器观测平面的位置和探头的指向角度。本文针对海洋光谱采集所存在的问题和已有海洋光谱自动采集系统所存在的不足进行了研究分析,设计实现了基于太阳角度变化实时调整仪器方位和探头角度的控制系统,实现了海洋光谱采集的全自动控制。
1 系统的总体设计
全自动海洋光谱采集控制系统(图1)主要包括数据采集接收模块、太阳角度计算模块、光纤探头指向分析模块、转动控制模块。

图1 系统模块示意图
1.1 数据采集接收模块
数据采集接收模块(图2)主要采集接收计算太阳角度所需要的信息,包括:(1)光谱采集位置的经度、纬度,光谱采集的日期、时间,这些所需要的位置及时间信息由GPS模块提供;(2)光纤探头所在仪器观测平面的初始方位角,该角度信息由电子罗盘提供。数据采集接收模块将接收到的这两部分信息发送给太阳角度计算模块。

图2 数据采集接收模块示意图
1.2 太阳角度计算模块
太阳角度计算模块依据接收到的位置、时间和角度信息,进行实时的太阳角度计算,太阳角度的计算主要由PIC下位机控制系统和上位机系统实现完成,其计算流程如图3所示。

图3 太阳角度计算流程图
1.3 光纤探头指向分析模块
光纤探头指向分析模块根据计算得到的太阳角度进行指向分析,如图4所示,ABCD平面为仪器所在的观测平面,EFGH平面为太阳光的入射平面。在进行测量观测时一般要求仪器观测平面与太阳入射平面夹角为135°左右,即∠COH=135°,在进行光谱采集时,光纤探头依次需要采集天空光的下行辐亮度、水体的上行辐亮度和参考板的上行辐亮度[10-11]。如图4所示,AO为测量参考板上行辐亮度时光纤探头的指向;AW为测量水体上行辐亮度时光纤探头的指向;AK为测量天空光下行辐亮度时光纤探头的指向;AK位于ABCD平面内。其中∠CAO和∠CAW均位于30°~60°之间。这样设置观测角度可以很好地避免太阳直射和反射的影响,避免采集的光谱出现饱和的情况[11-12]。

图4 水体光谱观测几何要求示意图
1.4 转动控制模块
转动控制模块依据分析得到的结果,向步进电机发送转动指令,控制步进电机旋转对应的角度值,使得仪器观测平面到达要求的观测位置,同时控制光纤舵机指向天空、海表面、参考板的所需角度进行光谱数据的采集测量。
2 太阳角度计算过程
2.1 太阳时角的计算
由于我国的时钟时间都是执行的北京时间,即东八区时间,而实际的当地时间即真太阳时并非所用时钟的北京时间,因此在进行太阳方位角计算时,首先要进行所在地理位置的真太阳时的计算,计算公式如下[13]:

式中:Tclock为所在位置的时钟时间;Le为所在位置的经度。计算得到真太阳时后,便可根据计算得到的真太阳时来计算所在位置的当前太阳时角。

2.2 太阳赤纬的计算
太阳赤纬即太阳直射点的纬度值,其值的大小变化主要由日期决定,太阳赤纬的计算根据所要求的计算精度不同有着很多的计算方法,这里参照参考文献[13]中的研究结果,采用所有太阳赤纬计算中精度较高的Bourges算法来计算太阳赤纬角,如下式所示:

其中:

式(5)中:dn值为所要计算日期在当年的第几天,即平年 dn值为 1~365,闰年 dn值为 1~366。
2.3 太阳高度角的计算
对于某个观测位置的太阳高度角指的是所在位置太阳光线与通过该位置与地心相连的地表切面的夹角[10]。观测位置确定后,影响太阳高度角大小的主要是时间,一天当中日出和日落的时候太阳高度角最小为0°,正午时分太阳高度角最大为90°。因此,计算太阳高度角需要观测地的地理纬度信息、根据日期计算得到的太阳赤纬信息和根据当天时间计算得到的太阳时角信息,计算公式如下所示[14]:

式中:Ll为所在观测位置的地理纬度信息。
2.4 太阳方位角的计算
太阳方位角指的是太阳光的入射方向与地平面之间的夹角,通常也被定义为以目标物的北方向为起始方向,以太阳光的入射方向为终止方向,按顺时针方向所测量的角度[14]。本文中,为了计算时的区分方便,以目标物的正南方向为起始方向,当上午时太阳方位为南偏东,此时太阳方位角即为负的该角度值。当下午时太阳方位为南偏西,此时太阳方位角即为正的该角度值[15-16]。

3 中国近海海域太阳方位角变化分析
本系统主要用于实现采集海洋光谱信息的全自动化,利用所得到的光谱信息反演水色三要素的值,以应用于海洋环境监测、海洋水文分析等方面。而远海大洋的Ⅰ类水体中水色三要素的含量相对较少且短时内相对稳定,对其研究的意义相对小于光学复杂的近岸Ⅱ类水体。该系统大多应用于近海的Ⅱ类水体的光谱采集工作,因此这里针对中国近海海域进行太阳方位角变化的分析。
3.1 不同海域太阳方位角变化分析
分别在渤海、黄海、东海、南海海域选取4个观测点,观测点的经纬度信息如表1所示。
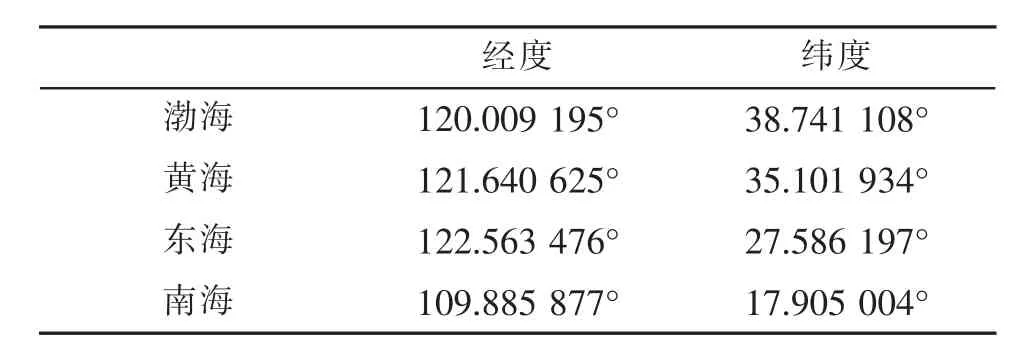
表1 4个观测点的经纬度信息
观测日期为2019年9月1号,观测时间为系统进行海洋光谱采集的时间,即9:00 AM-4:00 PM,在上述条件下对4个不同海域的观测点进行1 d的太阳方位角仿真分析,分析得到仿真结果,如图5所示。

图5 不同海域太阳方位角随时间的变化趋势
从图5可以看出,同一天的相同观测时间内,不同海域的太阳方位角随时间变化趋势并不相同,渤海和黄海海域地理位置相近,地理纬度最高,太阳方位角变化趋势也十分接近,比较接近线性,南海海域与另外3个海域相比变化差异最大,地理纬度最低,太阳方位角变化的线性趋势也最差。4个观测海域中太阳方位角到达零度即正南方位的时间从图中可以看出,由早到晚依次是东海、黄海、渤海和南海,也正是4个观测点经度由高到低的顺序。
为了更好地分析经纬度不同对太阳方位角变化趋势的影响,分别设定纬度相同、经度不同的4个仿真分析观测点和经度相同、纬度不同的4个仿真分析观测点,进行太阳方位角变化趋势的仿真分析,观测点的经纬度信息分别如表2~表3所示。

表2 4个观测点的经纬度信息(纬度相同)

表3 4个观测点的经纬度信息(经度相同)
仿真的观测时间设置为9月1日9:00 AM-3:00 PM,仿真结果如图6~图7所示。
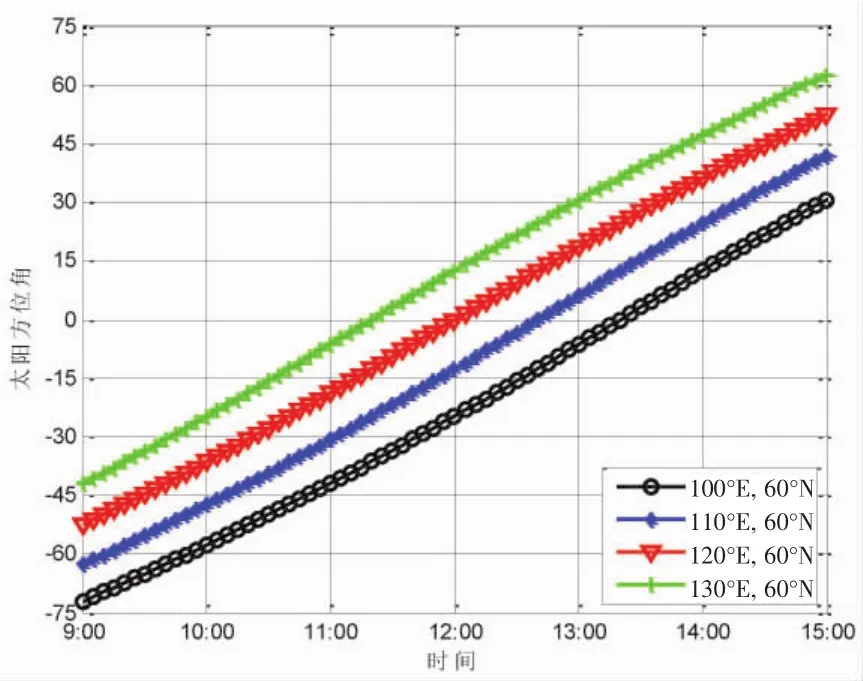
图6 相同纬度不同经度太阳方位角随时间的变化趋势

图7 相同经度不同纬度太阳方位角随时间的变化趋势
通过上述仿真结果分析可以得出,相同纬度情况下,随着经度的变化,太阳方位角的变化趋势不变,不同经度之间只存在着提前或者延时到达同一太阳方位角的情况,经度越低,延时时间越长。相同经度情况下,随着纬度的变化,太阳方位角的变化趋势会出现不同,纬度越高,一天中太阳方位角的变化趋势越接近线性;纬度越低,太阳方位角变化的线性趋势越差,在低纬度情况下,越接近中午时分太阳方位角变化越快,越接近早晚时分太阳方位角的变化越慢。
3.2 不同季节太阳方位角变化分析
对渤海的观测点位分别在一年中不同季节进行太阳方位角变化的仿真分析,分别选取2019年3月22日、6月22日、9月22日、12月22日代表春季、夏季、秋季、冬季进行观测,得到的仿真结果如图8所示。

图8 不同季节渤海海域太阳方位角随时间变化趋势
从图8可以看出,渤海海域春季和秋季一天中太阳方位角的变化趋势基本相同,冬季太阳方位角的变化最接近线性,夏季时太阳方位角变化的线性趋势较差。季节对于太阳方位角变化趋势的影响与纬度相同,不同的季节太阳直射点纬度不同,冬季的冬至日时太阳直射南回归线,夏季的夏至日时太阳直射北回归线。对于固定的同一观测点,不同的季节观测点纬度距离太阳直射纬度的纬度差值不同,由于观测点位于北半球的渤海海域,冬季时纬度差值最大,观测点与直射点的距离最大,夏季时纬度差值最小,观测点与直射点的距离最小。这一结果也与3.1小节中分析的“相同经度情况下,纬度越高太阳方位角变化趋势越接近线性,纬度越低太阳方位角变化的线性趋势越差”相一致。
依据仿真分析得到的太阳方位角变化规律可以对系统的方位角调整进行有侧重的设置。当观测位置位于高纬度海域或者是观测季节为夏季时,早晚时分太阳方位角的变化很慢,中午时分太阳方位角变化很快,此时可以调整系统控制,早晚时每间隔较长时间调整一次系统角度,中午时间隔较短时间调整一次系统角度。这样既可以保证角度调整的准确性和精度,又可以节省早晚时分系统调整次数过多的功耗。当观测位置位于低纬度海域或者观测季节为冬季时,太阳方位角变化基本趋于线性,相同时间内太阳方位角的变化值相同,可以设置系统的调整角度值为固定值,免去系统的计算过程,提高了系统的调整效率。
4 系统功能实现
观测系统结构示意图如图9所示。转台电机根据光纤探头指向分析模块发来的信息,实时地控制观测仪器转动,保证光纤探头所在的观测平面满足图4所示的要求。转台电机控制观测仪器到达观测平面后,光纤舵机控制光纤探头进行转动,依据图4所示的角度要求,控制探头分别指向天空、海水、参考板采集所需要的光谱信息。

图9 观测系统结构示意图
控制系统中的数据接收、太阳方位角计算、光纤探头指向分析部分集成于参考板支撑立柱下方的机箱内,通过485控制线、转台电机控制线、光纤与观测系统相连。控制系统依据接收到的时间、位置、角度信息实时地向转台电机和光纤舵机发送对应的角度信息,光纤探头采集到的光谱信息通过光纤传送给控制系统,全自动地实现光谱的采集工作。
系统全自动进行光谱采集的详细工作流程:
(1)PIC18控制器芯片通过485通信实时地接收来自罗盘的方位信息(仪器观测平面与正南方向的角度差值信息)和GPS的位置信息(经度、纬度信息),并通过串口通信将其发送给上位机系统。
(2)上位机系统接收到来自PIC18下位机系统传输的经纬度信息并读取系统的时间信息(年、月、日、时、分、秒),并依据章节2中的太阳角度计算流程,实时计算太阳的高度角和方位角。
(3)上位机系统依据接收到的罗盘方位信息确定正南所在的方向(即太阳方位角的零度所在方向),依据1.3节中的观测几何要求,即仪器观测平面与太阳入射平面夹角为135°左右,以及步骤(2)中计算所得的太阳方位角来确定当前仪器观测平面所需调整的角度值,并将该角度值发送给PIC18下位机系统。
(4)通过串口通信PIC18下位机系统接收到所需调整的角度值后,产生转动该角度值所需的PWM波控制信号并发送给图9中的转台电机,驱动转台电机转动控制仪器观测平面到达所要求的位置。
(5)上位机系统依据计算得到的太阳高度角和1.3节中的观测几何要求,分析计算得到光纤探头指向天空、海面、参考板时光纤舵机所需转动的3个角度值,并通过串口通信依次将这3个角度值发送给PIC18下位机系统。
(6)上位机系统给PIC18下位机系统发送3个角度值的过程:发送时先发送指向天空的角度值,发送后等待2 s(以等待下位机控制系统控制光纤探头转动并完成光谱信息采集),然后发送指向海面的角度值,再次等待2 s后,最后发送指向参考板的角度值。
(7)PIC18下位机系统通过串口通信接收到第一个角度值后,发送转动至该角度值的控制指令给光纤舵机,控制光纤探头转动指向天空,采集天空光的光谱数据,之后接收到第二个、第三个角度值后,分别控制光纤探头指向海面和参考板,采集海面和参考板的光谱数据。
系统在2019年6月搭载于“东方红3号”科考船上,进行了为期1个月的海上应用示范。本次系统搭载实验于5月31日开始,从上海江南造船厂码头出发,经过东海海域,于6月2日到达厦门近海船舶停靠锚地,补给后当天出发前往南海实验海域,并在南海实验海域进行相关实验,于6月8日出发返回厦门近海船舶停靠锚地,6月9日进行相关补给后,再次出发前往南海实验海域,并于6月19日返回厦门近海船舶停靠锚地,补给后再次前往南海实验海域,最终于6月30日返航厦门现代码头。详细的航线轨迹如图10所示,图中实心圆点为科考船停靠的作业试验位置。

图10 科考船停靠站位及航线区域示意图
在为期1个月的海试过程中,系统稳定可靠地实现了光谱的全自动采集工作,图11~图13所示为选取的6月9日13:40-14:40的时间内系统全自动连续采集的天空光、参考板和海面的光谱曲线。

图11 天空光光谱数据曲线

图12 参考板光谱数据曲线

图13 海面光谱数据曲线
从图11~图13中可看出,系统全自动控制采集的光谱数据的光谱强度由强到弱依次为天空、参考板、海面,这符合实际情况,光谱曲线的变化趋势也与实际相符,通过系统全自动控制采集得到的光谱数据与人工测量采集得到的光谱数据基本一致。通过光谱曲线的分析对比可以得出,系统的全自动光谱采集准确、稳定、可靠,可以替代人工进行光谱采集,满足实际需求。
5 结论
基于太阳角度的全自动海洋光谱采集控制系统实现了光谱采集的全自动无人值守状态,极大地节省了人力成本,同时也解决了人工测量光谱不连续、数据量小、覆盖海域小等问题,实现了船载海洋光谱仪对搭载船只航行海域光谱连续观测的功能。同时,对于太阳角度的实时精准计算分析能够很好地满足光谱测量对于仪器所在观测平面、观测角度的要求,保证了系统全自动采集的光谱数据准确可靠,可以替代人工完成光谱采集工作,并能够准确无误地采集到海洋水色反演所需要的光谱信息。
猜你喜欢
智能城市(2021年3期)2021-04-12 04:40:50
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
绿色科技(2019年12期)2019-07-15 11:13:02
齐鲁周刊(2017年29期)2017-08-08 06:28:15
水利科技与经济(2016年10期)2016-04-26 08:39:58
河南科技(2015年18期)2015-11-25 08:50:14
山东建筑大学学报(2015年4期)2015-05-11 09:05:22
技术经济与管理研究(2014年11期)2014-03-11 17:02:54
测绘学报(2014年2期)2014-01-11 02:09:52