基于物联网与无线传感器的智能声控搬运车系统
2020-06-12 07:31成薇胡书晨邱俊辉李嘉隆甄俊涛
电子技术与软件工程 2020年3期
成薇 胡书晨 邱俊辉 李嘉隆 甄俊涛
(湖北经济学院信息与通信工程学院 湖北省武汉市 430205)
1 引言
当今中国在工业运输方面的工业搬运车经历了四代发展。其中,第一代手动搬运车在工业搬运车市场仍占有一定份额。而目前国内最先进的搬运车是自动无人搬运车,这种搬运车路径导引方式主要是光导引和磁导引,需要在路径上安装相应的发光装置或是磁性物体。这两种引导方式虽然能够实现无人搬运功能,但只适用于较大规模的工厂、仓库等特定场景,而且安装路径成本较大,路径环境易受到外界环境的干扰。以声音为介质,通过语音控制搬运车理论上可以弥补这些不足,并可以实现搬运车的无接触式控制,适用于医院隔离病区医用物品的运输。
本文研究并设计的是一种基于物联网与无线传感器的智能声控搬运车系统,该系统有两种工作模式,分别为自由驱动模式和定位导航模式,均以语音命令进行控制。自由驱动模式下,语音命令可实时控制搬运车的运行状态;定位导航模式下,通过语音输入目的地,搬运车即可自动导航前往。同时该系统具备避障功能、人机语音交互功能,并可以在手机端查看搬运车的实时位置、环境与状态等信息数据。
2 系统设计方案
2.1 系统功能分析
智能声控搬运车系统主要研究以声音为导引介质来引导搬运车的运行,并通过声音来控制搬运车的运行状态与工作模式。其中,智能声控搬运车基于语音引导有两种工作模式,分别为自由驱动模式与定位导航模式。除了两种基本的工作模式外,智能声控搬运车系统通过蓝牙与手机端连接,通过多种传感器采集搬运车的环境与状态数据,实现在手机端查看搬运车实时位置、环境状态信息的功能。
2.1.1 自由驱动模式
用户可以通过语音命令控制搬运车的启动、右转弯、后退、停止、前进、左转弯等基本运行状态。搬运车实时监测障碍物,当监测到障碍物时将自动绕开障碍物,可以避免碰撞以及其他类似情况发生。自由驱动模式的功能框图如图1所示。
自由驱动模式下,用户需输入正确的一级语音命令并被系统成功识别后方可输入二级语音命令改变搬运车的运行状态,该系统设定的一级语音命令为“小智”。用户输入了一级语音命令并且系统进行语音响应后,系统预留10秒钟的时间等待用户输入二级语音命令,若输入超时,用户则需重新输入一级语音命令。每条指令被成功识别后,系统会产生相应的语音响应进行提示。当输入的二级指令为“模式切换”时,搬运车将切换到定位导航模式。
2.1.2 定位导航模式
定位导航模式主要实现用户通过语音命令搬运车自动前往指定目的地的功能。定位导航模式的功能框图如图2所示。

图1:自由驱动模式功能框图
在定位导航模式下,通过语音向搬运车传达目的地信息,搬运车根据GPS定位功能对目的地及自身位置进行定位,计算运行方向,并自动前往指定位置。在这种模式下搬运车运行的过程中也可以检测障碍物,绕开障碍物,并重新调整、规划路径。当搬运车到达目的地后停止运行,并切换成自由驱动模式。
2.1.3 连接手机端
智能声控搬运车系统设计开发了基于Android操作系统的智能手机APP,用于搬运车数据信息的显示,并对搬运车的基本运行状态进行控制。手机APP主要显示的数据信息有:搬运车当前负载重量、速度与加速度、搬运车当前位置、环境的温度与湿度。手机APP对搬运车的控制主要为控制搬运车的启动、停止、转弯、后退等基本运行状态。
2.2 系统总框架设计
智能声控搬运车系统使用STM32F103ZET6型号的微处理器,该种型号的微处理器有5个通信串口,而智能声控搬运车系统需要9个串口进行通信,因此系统采用双处理器模式,即使用两个STM32F103作为系统的主控模块,两个微处理器之间通过串口通信交换数据。根据实现功能的不同,将两个微处理器分为中心控制节点和信息汇聚与通信节点。
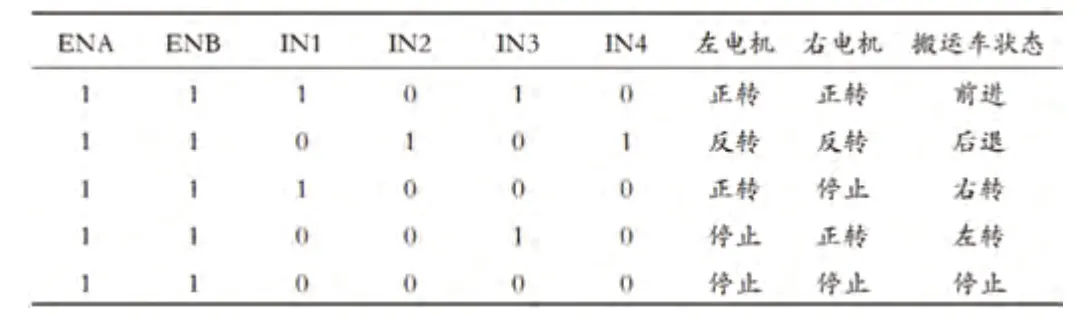
表1:L298N逻辑真值表

图2:定位导航模式功能框图

图3:智能声控搬运车系统框架图
中心控制节点主要控制并协调智能声控搬运车的两个基本工作模式,即自由驱动模式和定位导航模式。中心控制节点控制搬运车的驱动模块、GPS定位模块、语音播报模块、语音识别模块和避障模块。
信息汇聚与通信节点主要进行数据信息的处理与传输,通过蓝牙通信实现智能声控搬运车与手机端APP的数据交换。信息汇聚与通信节点控制蓝牙模块、压力传感器模块、温湿度传感器模块、速度传感器模块。智能声控搬运车的系统框架图如图3所示。
智能声控搬运车在自由驱动模式下,语音识别模块先检测并识别用户输入的语音命令,将识别出来的语音命令通过串口发送给中心控制节点,中心控制节点控制语音播报模块发生相应的语音响应,并根据语音命令通过控制驱动模块来改变搬运车的运行状态。在搬运车的运行过程中,避障模块不断检测前面有没有障碍物,如果避障模块检测到了障碍物,则向中心控制节点发送信号,中心控制节点则控制避障模块寻找无障碍物的路径从而绕开障碍物。当工作模式为定位导航模式时,语音识别模块识别用户输入的目的地信息并发送给中心控制节点,GPS定位模块对搬运车自身位置进行定位,并将搬运车的经纬度信息发送给中心控制节点,节点根据目的地和搬运车当前位置的经纬度信息计算运行方向,并控制驱动模块驱动搬运车前往目的地。
信息汇聚与通信节点主要接收压力传感器模块、速度传感器模块、温湿度传感器模块和中心控制节点传送过来的数据信息,并将所有数据信息按照一定的时序通过蓝牙模块发送给手机端。同时蓝牙模块接收手机端蓝牙设备发送过来的指令信息,然后通过串口发送给信息汇聚与通信节点,最后将指令信息发送给中心控制节点进行执行。
3 系统模块设计
智能声控搬运车系统采用分模块设计研究的方法,系统分为7个分模块,分别为:驱动模块、避障模块、语音播报模块、语音识别模块、GPS定位模块、蓝牙模块和传感器模块。
3.1 驱动模块
智能声控搬运车驱动模块的硬件部分由驱动板、直流电机、轮子和电池组成。驱动板使用的是双H桥电机驱动模块,该模块的主控芯片为L298N芯片,每个模块可以同时控制两个直流电机,智能声控搬运车使用四轮直流驱动,需要用到两个双H桥电机驱动模块。L298N芯片的工作电压为5V,驱动电压为12V。每个驱动板驱动直流电机的逻辑真值表如表1所示。
ENA和ENB分别为左右电机的使能端,IN1与IN2控制左电机的反转、正转和停止,IN3与IN4控制右电机的正转、反转和停止。
3.2 避障模块
智能声控搬运车避障模块的硬件部分主要由超声波模块和舵机组成。超声波模块用于测距,工作电压为5V,射程范围为2cm-4m。舵机用于控制超声波模块的旋转,旋转角度为180°。搬运车在行驶的过程中超声波模块不断检测前方是否有障碍物,当测量距离小于阈值30cm时,则进入避障程序,具体过程如图4所示。
3.3 语音识别模块
智能声控搬运车系统的语音识别模块采用的是LD3320语音识别芯片,该型号芯片集成了语音采集和识别算法。语音识别模块可以识别50条语音,识别距离最大为2米,识别率约为90%。系统采用两级语音口令,一级口令为“小智”,一级口令验证成功后方可进行二级指令的输入。
3.4 语音播报模块
语音播报模块使用的是TTS-V5模块,该芯片可以将汉字、英文字母、数字转换成语音信号。中心控制节点通过串口将需要进行播报的字符串发送给该芯片,即可实现语音播报的功能。
3.5 GPS定位模块
智能声控搬运车系统GPS定位模块的硬件部分由GPS模块和GY-85传感器组成。GPS模块用于对搬运车的位置进行定位,通过串口向中心控制节点返回搬运车位置的经纬度信息。根据已知目的地的经纬度与搬运车位置的经纬度可以计算出两点方向与N极方向的夹角。计算过程为:设搬运车自身位置的经纬度为(x1,y1),已知目的地经纬度为(x2,y2),则两点方向与N极方向的反正切值为:

GY-85传感器模块包括三轴加速度传感器ADXL345、三轴陀螺仪ITG-3205、三轴数字罗盘HMC5885L等三个部分,主要功能是测量计算搬运车前进的方向与N级的角度差。GY-85传感器的工作原理为:任何一个物体在空中的姿态都可用图5表示,将物体的中心为原点建立坐标轴,Level X与LevelY分别表示水平面的方向,定义α为物体的x方向与水平面方向的夹角,定义β为物体的y方向与水平面方向的夹角。
通过三轴加速度传感器检测并计算出ɑ和β,由三轴数字罗盘测出地磁场在X、Y、Z三轴的分矢量数据。最后根据公式计算出物体的x方向与N极的角度差的正切值θ2:

最后根据(θ1-θ2)计算出搬运车需要调整的角度。

图4:避障程序流程图
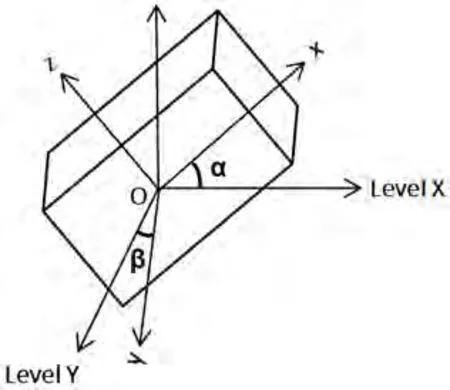
图5:物体在空间的姿态
3.6 蓝牙模块
智能声控搬运车系统的蓝牙模块是型号为HC-05的主从一体蓝牙模块。通过AT指令将蓝牙模块设置为主从模式,主要作用是实现智能声控搬运车系统与手机之间的串口通信。由于传输的数据类别较多,为了准确分辨数据类别,将蓝牙传输的数据第一位或第一、第二位设置为数据识别码。数据类别识别码定义的格式如图6所示。
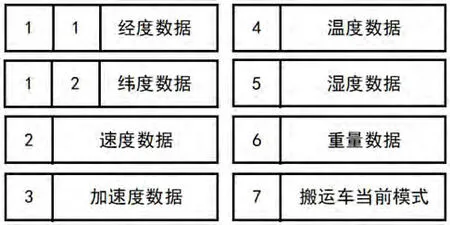
图6:蓝牙数据类别识别码
3.7 传感器模块
智能声控搬运车系统的传感器模块包括压力传感器模块、温湿度传感器模块和速度传感器模块。传感器模块的主要功能是测量搬运车的运行速度、加速度和负载重点,检测搬运车所处环境的温湿度。传感器模块的所有测量数据传送给信息汇聚与通信节点,节点对接收到的数据进行处理与格式化,通过蓝牙模块发送到手机端进行显示。
压力传感器模块中,压力敏感元件为电阻应变片,量程为40kg,信号处理单元使用的是HX711模块,该模块为电子秤专用的24位A/D转换模块,用于将检测到电压的变化转换为数字信号输出。
温湿度传感器模块使用的是DHT11数字温湿度传感器,测量得到的温湿度数据从温湿度传感器的DATA引脚输出,然后传送给信息汇聚与通信节点进行处理。
速度传感器模块使用的是进口槽型光耦传感器,当槽中有遮挡物时,模块的D0引脚输出高电平。在搬运车的轮子上安装遮挡片,设轮子的半径为r,则轮子转一圈,搬运车行驶的距离为2rπ,运行时间为D0引脚连续两次输出高电平间隔的时间。将距离除以时间,得到搬运车的速度。多次测量获取数据后用速度差除以时间差,得到搬运车的加速度。
4 结语
智能声控搬运车系统实现了通过语音命令控制搬运车的运行以及自动定位导航的功能。通过对该系统的研究与设计,明确了语音识别是一种实现无接触式控制的有效方式。无接触控制的方式在医院的隔离病区可以起到很大的作用,如果将智能声控搬运车应用于隔离病区医用物品的运输,可以避免医生与病人的间接接触,在一定程度上可以降低交叉感染的风险。但GPS技术无法实现室内精准定位,未来可尝试安装摄像头,通过视觉图像识别处理技术提高定位的精准程度。
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年14期)2019-08-20
电子制作(2019年9期)2019-05-30
小说界(2018年5期)2018-11-26
小学阅读指南·高年级版(2016年7期)2016-07-25
小雪花·初中高分作文(2015年7期)2015-09-23
全球定位系统(2015年4期)2015-02-28
全球定位系统(2015年4期)2015-02-28
全球定位系统(2015年4期)2015-02-28