
基于DSP的无刷直流电机系统软件设计*
2020-06-03 11:56朱淑云黄灿英
沈阳工业大学学报 2020年3期
朱淑云, 黄灿英, 陈 艳
(南昌大学 科学技术学院, 南昌 330029)
无刷直流电机是一种使用电子换相方式将电能转变为机械能的转动装置,具有良好的启动和调速性能,同时兼具易实现、易维护、稳定性强和效率高的特点[1].在此背景下,无刷直流电机广泛应用于航天、工业和医疗等领域[2-4],然而随着科技的进步,无刷直流电机也逐渐转换为由DSP专用芯片的全数字化控制[5-7].
目前,TI公司生产控制精度最高的DSP电机芯片具有大型算法的实时控制能力,例如卡尔曼滤波算法、神经网络控制算法及多种PID控制算法等[8-10].本文介绍了无刷直流电机的结构原理,设计了硬件电路,重点阐述了调速系统各模块,其主要模块包括速度环、电流环、转子检测换相、PWM波生成等,完成了无刷直流电机调速系统的软件设计,并测试了无刷直流电机调速系统的具体性能.
1 结构原理
无刷直流电机主要由电动机、位置传感器和电子开关线路3部分组成,其具体组成如图1所示.

图1 无刷直流电机的结构图Fig.1 Structural diagram of BLDCM
电动机可分为定子和转子两部分,定子由铁心与电枢绕组构成,具有能量转换的作用,本文选用轴向气隙和非重叠绕组类型的定子;转子由极对数结构的永磁体构成,与定子绕组一起旋转,产生足够的电磁转矩,保证电机的持续转动.位置传感器检测电动机转子磁极的位置变化,并将其转换为逻辑信号,从而实现电机功率的开关控制,考虑到系统的稳定性和体积因素,本文选用磁敏式传感器作为无刷直流电机的位置传感器.电子开关线路一般由逻辑开关和信号处理模块组成,其中,逻辑开关主要负责管理电源功率的分配,而信号处理模块需要使用霍尔位置传感器,负责检测转子的位置信息[11-12].根据功率控制方法,无刷直流电机可分为半桥和全桥两种;根据绕组连接方法,无刷直流电机可分为星形和三角形连接.本文选用全桥功率控制的三相星形电机.
2 控制系统
2.1 控制方案
为了更加精确地控制电机转速,本文使用TI公司的TMS320F28335芯片进行控制,设计了无刷直流电机的调速系统,其控制方案如图2所示.

图2 调速系统控制方案Fig.2 Scheme for speed control system
无刷直流电机调速系统的设计主要包括电流检测、转子位置检测和速度检测等.调速系统的电流检测主要通过调整波占空比改变电机转速,而本文选择了霍尔电流传感器完成检测电流的任务.转子位置检测主要被用于控制电机的时间顺序,为了准确检测转子的位置,本文在三相电机中安装了3个霍尔位置传感器,采集相应的逻辑信号,并传输到DSP芯片进行处理.本文选用了光电编码器,该编码器包含光栅编码器和光电检测器,即利用传感器将光源的遮挡情况转换为规律的脉冲信号,经过DSP芯片处理,即可得到精确的电机转速.
2.2 硬件电路
在无刷直流电机的调速系统中,其硬件电路主要包含电源控制、DSP芯片控制、电流检测、转子位置检测、转速检测、保护、功率驱动、显示等电路.其中,调速系统的电源控制电路使用了线性电源、无源电容滤波和整流电路为各个部件供电.功率驱动电路使用集成的IGBT功率器件,实现了系统的换相和转速控制等操作,其具体电路设计如图3所示,其中,显示电路选择74AC245作为显示屏LCD的驱动,实现系统相关信息的反馈。
3 软件设计
为了完成无刷直流电机调速系统的软件设计,本文引入了适用于DSP专用芯片的集成开发软件CCS3.3.该软件具有源程序编写、链接、调试和结果分析等多种功能.该软件有两种运行模式,第一种是软件仿真模式,而第二种是硬件在线编程调试模式.本文使用第二种模式实现了编程和程序调试等功能.
3.1 系统主程序
在CCS3.3开发环境中,本文使用C语言编写系统的核心程序,其中包括系统主函数和主中断程序.系统主函数程序需要实现各系统子功能的初始化,这些子功能包括外围时钟、PIE寄存器、GPIO、SCI& FIFO寄存器、CPU定时器、PID算法参数设置、PWM模块、ADC模块和HALL模块等.而在主中断程序中,系统需要具备霍尔信号的检测能力,从而区分PWM模块的输出时序.系统的QEP模块和ADC模块需要具有速度、电流的采样及运算能力,实现PWM调节,从而完成电机的调速.系统的主程序流程如图4所示.
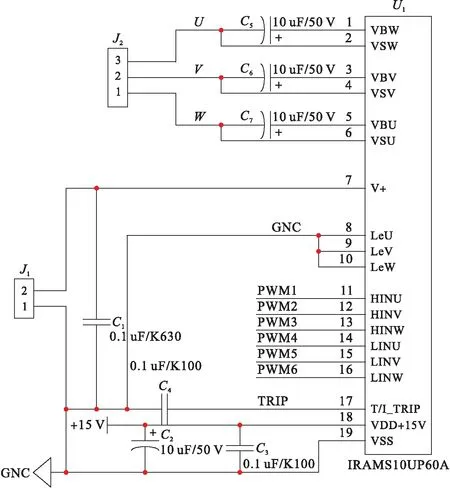
图3 功率驱动电路Fig.3 Power drive circuit
3.2 速度环程序
在无刷直流电机的调速系统中,速度的检测和采样等操作主要由QEP模块的光电式编码器完成,其具体过程描述如下:设A、B分别是光电式编码器的两路正交信号,进行光耦隔离,并将其传送给DSP芯片,经过4倍鉴频处理后,最终使用M/T测速方法得到电机的转速,并反馈到系统中.速度环程序的流程图如图5所示.
3.3 电流环程序
在速度环的检测结果输入之后,电流环需要使用霍尔传感器将相电流转换为电压信号,经过调整后传送给DSP芯片.然后利用芯片的模数转换功能得到电流的采样值,再将这些采样值与速度环的输出结果进行比较和调节,最后得到电流环的检测结果,具体的程序流程如图6所示.

图4 系统主程序流程图Fig.4 Flow chart of system main program

图5 速度环程序流程图Fig.5 Flow chart of speed loop program

图6 电流环程序流程图Fig.6 Flow chart of current loop program
3.4 转子位置检测程序
转子位置检测程序是调速系统控制程序的重要环节,具体控制方法为:通过霍尔位置传感器检测转子的位置变化,得到相应的数字逻辑信号;经过隔离操作再传输到DSP芯片的HALL检测模块中,程序流程如图7所示.

图7 转子位置检测程序流程图Fig.7 Flow chart of detection program for rotor position
根据无刷直流电机的功率控制和转子位置检测工作原理,可以得出换相控制参数与开关管工作状态的具体对应关系.令CAP1、CAP2和CAP3表示系统的3个霍尔位置传感器(1表示检测到信号,0表示未检测到信号),HA、HB和HC表示逻辑信号,V1、V2、V3、V4、V5和V6表示6个开关管,则正向转换及反向转换的对应关系分别如表1、2所示.
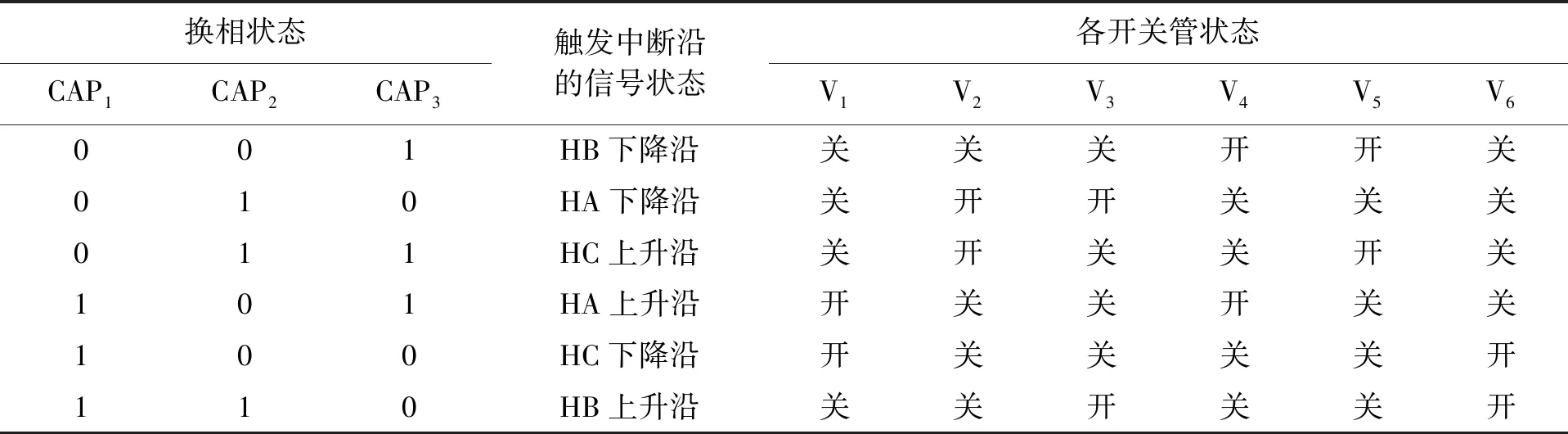
表1 正向转动换相控制与开关管对应关系Tab.1 Corresponding relationship between commutation control of forward rotation and switch tubes
3.5 PWM程序
在所使用的DSP芯片中,有3个比较单元能够生成6个PWM波形.通过死区单元、逻辑化处理和光耦隔离等硬件电路处理后,这些波形可以驱动绝缘栅双极型晶体管(IGBT)运行,从而控制无刷直流电机的电枢绕组换相和转子转动速度.若PWM波占空比值增加,则电动机的转子转速增加;否则,电动机的转子转速降低.
在PWM程序运行过程中,为了保证逆变电路的正常运行,还需在同相位的开关信号之间预留死区时间.这是因为当某一电路元件未完全关闭时,若另一电路元件导通,则电路的两个元件将产生短路,烧坏电路的多个元件.本文将绝缘栅双极型晶体管的死区时间设置为2~5 μs.

表2 反向转动换相控制与开关管对应关系
4 软件仿真
为了验证电机调速系统软件设计的正确性,对该系统软件进行了仿真.在软件仿真过程中,本文添加了相应的图形窗口,显示电机转速的波形曲线图.由于仿真的目的是考察无刷直流电机调速系统软件的性能表现,所以图形窗口的波形曲线图应显示电机的给定转速和实际反馈速度.
经过多次仿真,本文给出了电机速度为750 r/min和1 200 r/min时的波形曲线图,其波形曲线如图8、9所示.同时,为了阐述系统设计的优越性,本文还使用同样的仿真技术,对基于NiosⅡ的电机调速系统软件进行了具体的测试,所得的波形曲线如图10、11所示.

图8 DSP电机速度为750 r/min时的波形图Fig.8 Waveform of DSP motor at speed of 750 r/min
图8~11中,中间的红线表示无刷直流电机的给定转速,黑线表示无刷直流电机的实时转速.对比图8和图10可知,当给定转速为750 r/min时,基于DSP的无刷直流电机的实时转速有微小抖动,总体保持稳定;而基于NiosⅡ的直流电机的实时转速波动较大,对比图9和图11也可以发现这样的结论.当给定转速为1 200 r/min时,无刷直流电机的实时转速抖动小于给定转速为750 r/min的抖动,即该软件系统在给定转速较高时,其实时转速的稳定性更好.

图9 DSP电机速度为1 200 r/min时的波形图Fig.9 Waveform of DSP motor at speed of 1 200 r/min

图10 NiosⅡ电机速度为750 r/min时的波形图Fig.10 Waveform of NiosⅡ motor at speed of 750 r/min

图11 NiosⅡ电机速度为1 200 r/min时的波形图Fig.11 Waveform of NiosⅡ motor at speed of 1 200 r/min
5 结 论
基于DSP芯片、控制方案和相应的硬件电路,通过使用CCS3.3软件开发环境,本文提出了无刷直流电机调速系统的软件设计方案,实现了调速系统的数字化运行.然而,本文未分析软件系统的鲁棒性,同时,本文仍然是在PID算法的基础上进行优化,没有应用神经网络和模糊自适应等新型算法,所以,如何保证系统的鲁棒性,并将更加优秀的算法和技术应用到无刷直流电机的软件设计方案中是未来研究和努力的方向.
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
防爆电机(2022年3期)2022-06-17
初中生学习指导·中考版(2022年4期)2022-05-12
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
高考·中(2020年2期)2020-09-10
电子制作(2019年24期)2019-02-23
电子制作(2019年23期)2019-02-23
