
一种宽幅星载TOPSAR数据高效成像算法
2020-05-30 21:20:30高贺利陈杰杨威李春升
南京信息工程大学学报 2020年2期
关键词:插值
高贺利 陈杰 杨威 李春升


摘要得益于天线波束方位向扫描技术,星载合成孔径雷达(SAR)能够在渐进扫描模式(TOPS)下实现宽测绘带观测.在TOPS模式下,SAR波束沿着方位向进行逆时针反复扫描,并在距离向上进行多次切换,从而获取多个图像切片(burst).为了获得均匀采样的完整成像结果,通常需要对各burst进行重采样,但这会增加额外的计算量,降低处理效率.本文提出了一种宽幅星载TOPSAR数据高效成像算法.首先,在去斜率操作中引入一种新的插值方法,可以灵活地调整最终图像的方位采样间隔,方便进行图像拼接.该方法避免了在聚焦处理前的补零操作,从而降低计算量.在此基础上,本文结合TOPS模式多burst的特点,设计了一种GPU并行处理架构,成倍地提高数据处理效率.最后,根据仿真数据进行了实验,验证了该成像算法的有效性和高效性.关键词合成孔径雷达(SAR);渐进扫描(TOPS);插值;图形处理单元(GPU)
中图分类号TN958
文献标志码A
0引言
合成孔径雷达(SAR)在环境监测、地质测量、减灾救灾等地球观测领域发挥着重要作用.利用方位天线波束扫描技术,SAR可以工作在滑动聚束[1-2]和渐进扫描(TOPS)[3-4]模式下,其中TOPS模式比传统条带模式具有更大的观测范围,同时也避免了扫描(SCAN)模式中的扇贝效应.
在TOPS工作模式中,对于沿方位向分布的目标,由于方位波束的扫描,其多普勒历程存在空变性,它们的多普勒中心频率随方位位置线性变化,从而扩展了TOPS回波信号的整体频谱宽度.同时由于系统设计的限制,系统脉冲重复频率(PRF)通常小于TOPS回波信号的整体带宽,导致了频谱混叠现象和时域混叠现象.这种情况下,传统的成像算法并不适用于TOPSAR数据处理.为了解决这一问题,多种成像算法被相继提出.首先,频谱拼接法[5]将信号频谱进行重新拼接,从而消除了频谱混叠,实现图像聚焦,但该方法需要复杂的切分、拼接等操作,效率较低.随后,子孔径处理[6]方法被引入到TOPS处理中,并在TerraSAR-X中得以运用,但它同样需要进行子孔径分块、拼接等复杂操作.之后,杨威等提出了三步聚焦成像算法[7-8],该算法采用去旋转操作和去斜坡操作来克服混叠,实现全口径聚焦,有效地提高了处理效率.
然而,在这些算法中,均没有考虑不同burst(图像切片)间系统参数的不一致性.由于不同burst的PRF、方位向采样点数等参数不同,导致各burst最终图像的采样间隔存在不一致.为了实现最终的拼接图像的均匀采样,需要进行额外的重采样操作,这影响了整体的处理效率.同时,多个burst数据通常是在中央处理器(CPU)中串行处理,这也限制了处理效率的提高.
本文针对TOPSAR数据处理面临的效率问题,提出了一种宽幅星载TOPSAR数据高效成像算法.首先,本文回顾了三步成像算法,并针对算法中PRF的变化进行了详细分析.基于此,提出了一种插值方法,能够与三步成像算法兼容,并保证最终图像的方位向采样间隔的一致性.然后,基于TOPSAR数据多burst的特点,提出了基于GPU(图形处理单元)的高效并行处理架构.最后通过仿真数据验证了该算法的有效性和高效性.
1TOPSAR工作模式与三步成像算法
1.1TOPSAR工作模式
与条带模式相比,星载SAR工作在TOPSAR模式下能够在二维实现更宽的观测.TOPS工作模式现在已经被许多SAR卫星所采用,特别是Sentinel-1A卫星采用TOPS作为默认成像模式.图1给出了TOPSAR的工作模式及其成像几何关系.如图1a所示,SAR传感器在每个burst内,波束从后向前逆时针旋转,在完成该burst的扫描后,波束指向下一个距离视角,再次进行方位向扫描.当距离向视角变化完成一个周期后,重新回到第一视角,继续扫描,此时波束照射到的场景与前一次循环中的该视角下照射的场景是连续的,在系统设计中会有一部分重叠区域.图1b中所示的TOPSAR的几何模型,方位波束随着平台运动不断旋转,指向虚拟旋转点.其中T表示该burst照射时间,Xswath表示方位向场景宽度,XΔθ表示波束脚印长度,ωθ表示波束扫描角速度,rs表示SAR传感器到虚拟旋转点的距离,r0表示零多普勒时刻SAR传感器到场景中心的距离.需要说明,在TOPS模式下,rs值为负.
由于TOPSAR信号处理难度主要在方位向信号处理上,因此本文仅仅考虑方位向信号处理.假设方位波束在每个burst中以固定角速度旋转,那么TOPSAR方位信号可以表示为
s(1)(t,td)=WaYvt-vtdXΔθrecttTrectvtdXswath.exp{-jπfr(t-td)2}, (1)
其中,t表示方位向慢时间,td表示场景内任一点目标的方位时间.Wa(·)表示方位向天线方向图,rect[·]表示矩阵窗函数,Y和fr分别表示旋转度因子与多普勒调频率:
Y=rs-r0rs, (2)
fr=2v2λr, (3)
其中,λ表示波长.在式(1)中,采用了斜视等效模型,并忽略了斜距历程高次项.
1.2三步成像算法
由于天线方位波束旋转,使得整个频谱在多普勒域内沿目标方位位置产生扩展.由于系统PRF仅大于单点的多普勒带宽,考虑到场景内所有目标,多普勒频谱必然发生混叠.因而传统的成像算法不能直接用于处理TOPSAR数据.三步聚焦算法是一种有效的算法,该算法能够克服时间域和多普勒域的混疊.
首先,为了克服多普勒频谱混叠,第一步先进行去旋转操作:
s(2)(t,td)=s(1)(t,td)exp(-jπfωt2), (4)
其中,fω=-2v2λrs.这一步之后,信号的采样频率得到了提升,同时信号中扭曲的频谱也得到了校正,频谱的混叠得以校正.
在第二步中,多种处理内核可以用来进行图像聚焦,例如,ω-k,CS (Chirp Scaling) 和 FS (Frequency Scaling)等.在本文中,采用CS算法.在第二步完成图像聚焦后,方位向信号在图像域依然存在混叠.为了消除这种混叠,第三步中对数据进行去斜处理.
对第二步聚焦后的数据进行快速傅里叶变换(FFT),它在多普勒域的表达式为
S(2)(f)=Wa-f+fxtdB3dB/Yrect-f+frtdTfrrectvtdXswathexpjπf2fω, (5)
其中,fx=2v2λ(rs-r0),B3dB表示波束的3 dB宽度.
在第三步的去斜处理中,式(5)中的二次相位将会补偿掉,然后通过相位相乘引入一个新的二次调制相位,如下:
H1(f)=exp-jπf2fωexp-jπf2fx. (6)
然后,再应用FFT,将数据变换为时域,再进行一次相位相乘和傅里叶变换即可得到无混叠全孔径图像.该相位表达式为
h(t)=exp{-jπfxt2}. (7)
2新的插值方法
2.1PRF的变化
在三步成像算法中,由于进行了去旋转和去斜操作,信号的PRF在这两个操作后会发生变化,使得最终图像的PRF与系统的PRF不再一致,而是受到多个系统参数与方位处理点数的影响.
从1.2节可知,去旋转操作本质上是对信号进行了卷积操作.令fprf表示系统的脉冲重复频率,则处理后的PRF可以用下式表示:
fprf,1=Na,1·fωfprf, (8)
其中,Na,1表示处理的方位向点数.为了保证fprf,1比信号的3 dB波束带宽大,通常需要对信号进行补零操作,因此,Na,1中包含了补零的点数.
在完成方位聚焦后,第三步去斜前,信号的方位向采样频率均为fprf,1,当完成去斜操作的最后一项傅里叶变换后,信号的方位采样频率变为
fprf,2=Na,2·fxfprf,1, (9)
其中,Na,2表示进行去斜处理时的方位向点数,包含补零的点数.将式(8)代入(9),可得:
fprf,2=Na,2Na,1·1Y·fprf. (10)
在三步聚焦成像算法中,Na,1与Na,2是相等的,此时最终图像的采样频率为
fprf,2=1Y·fprf. (11)
因此,在三步聚焦成像算法中,最终图像的采样频谱与系统的PRF和旋转因子有关.对于距离向不同视角下的burst,系统PRF通常也是不同的.采样频率的不一致为图像的拼接带来更多的处理负担.
2.2新的插值方法
从式(10)可以看出,如果第三步去斜操作中,处理的信号点数Na,2与Na,1不相等,那么最终图像的采样率则会变化.因此,可以通过调整Na,2的大小,使得最终图像采样率变得一致.改变前后的去斜处理流程如图2所示.
在实际数据处理中,可以先根据式(11)计算出各burst最终图像的PRF,然后根据一定的规则,设定一个合理的PRF.一种自然的选择方式是取它们的平均值作为最终图像的PRF,记为fprf,ave.然后再根据式(9)计算出需要在去斜处理中采用的Na,2,为
Na,2=fprf,2·fprf,1fx, (12)
其中,[·]表示取整.由于Na,2必须为整数,因此造成最终得到的图像采样率与设定的fprf,ave存在细小的差别.这个误差可以通过轻微调整fx的值使得最后的采样率完全一致.
3基于GPU的宽幅星载TOPSAR数据并行处理架构
为实现宽测绘带观测,TOPS工作模式中,通常沿距离向和方位向需要进行多个burst扫描,然后再通过地面数据处理,合成一幅宽覆盖的大图,以达到100 km以上的观测幅宽.在传统的数据处理系统中,这些burst需要顺序通过CPU的处理,分别得到成像结果后,再进行图像拼接才能完成全部流程,效率比较低.
近年来,随着硬件技术的不断进步与发展,GPU在数据处理中应用越来越广,起到了越来越重要的作用.利用GPU的并行处理能力,可以快速提高数据处理能力.一方面,在TOPSAR成像处理中,主要运算为FFT操作与复数点乘,适合发挥GPU的优势,快速完成每个burst的处理;另一方面,对于大型的数据处理系统,通常能够搭载很多GPU显卡,因此,通过合理的分配,可以同时调用多块GPU处理器,分别处理多个burst数据,从而使得处理效率得到数倍的提升.
在获取全部TOPS数据后,先将各burst数据的处理参数进行计算,依据式(12)计算各burst的去斜点数.然后,根据GPU处理器数量,分配处理资源,完成各burst数据的成像处理.由于处理得到的各子图像具有一致的采样间隔,依据方位时序与距离视角,可以直接进行图像拼接.最后完成图像的几何校正,得到最终的图像产品.在每个burst数据处理过程中,由于需要方位向和距离向两个维度的FFT,不可避免需要数据转置操作,另外还有补偿矩阵的构建,这两方面均需要不断地申请内存.为了缩减内存开辟的次数,可以根据数据大小,在开始处理时,只申请一次内存,在后面的处理中反复调用,這样能够进一步缩减处理时间.基于GPU的宽幅星载TOPSAR数据并行处理架构如图3所示.
4仿真實验
本节将利用仿真数据,对提出的算法进行验证,主要验证算法的有效性和高效性.
4.1仿真成像实验
本小节主要通过点目标仿真实验,对提出的宽幅星载TOPSAR数据高效成像算法进行验证,通过评估点目标的成像质量,验证算法的有效性.实验仿真参数如表1所示.
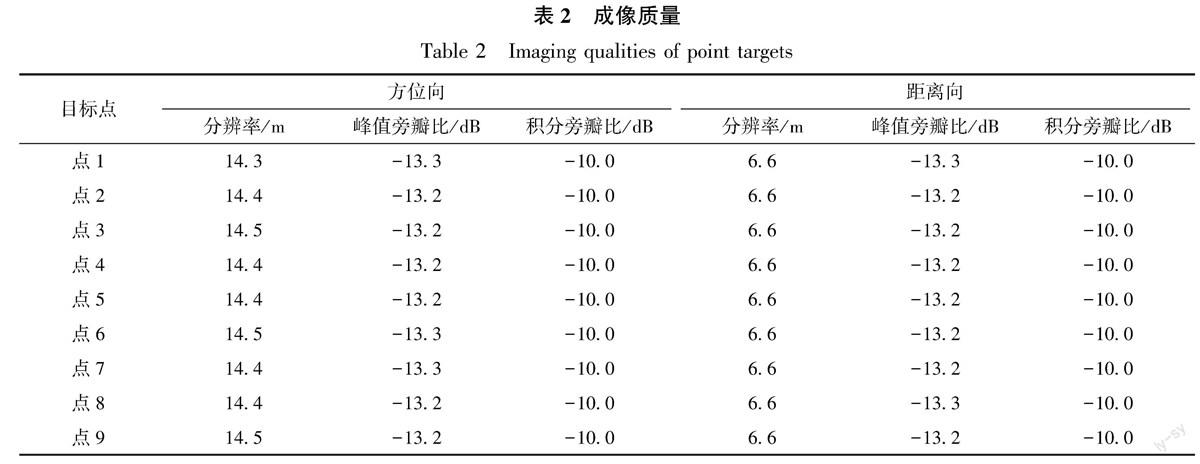
在场景中布设3×3点阵目标,其中方位向点阵间隔15 km,距离向点阵间隔15 km,如图4所示.利用表1参数进行回波仿真,然后应用本文所提出的一种高效成像算法进行成像处理.图5给出了点1、点5和点9的成像结果,9个点目标的成像质量如表2所示.
从图5的成像结果及表2的点目标成像各项指标可以看出,本文提出的宽幅星载TOPSAR数据高效成像算法能够实现数据的良好聚焦,成像结果指标和理论值保持一致.表2中,近距的点1、点4和点7的方位分辨率优于远距的点3、点6和点9,这是由TOPSAR的体制决定的,具体分析可参考文献[8].
4.2效率仿真实验
本小节拟利用GPU与传统CPU数据进行处理,对比处理效率.处理数据为12组TOPS数据,距离向4个burst,方位向3个burst,参数如表1所示,各burst仅PRF与Na,2存在区别.处理环境及处理时间如表3所示.从处理时间上对比,GPU能缩短数倍的计算时间.
5结论
本文针对星载TOPSAR模式面临的数据处理效率的问题,提出了一种宽幅星载TOPSAR数据高效成像算法,并通过理论推导及仿真实验验证了算法的有效性及高效性,极大减少了TOPSAR数据拼接及串行处理造成的时间成本.本算法在三步成像算法的基础上,无需增加额外的处理步骤,可在成像过程中完成图像的重采样,避免了图像拼接前的插值处理,是一种高效的处理算法,同时保持了三步成像算法的精确性,适合于宽覆盖多burst的星载TOPSAR数据的处理.同时,本算法将TOPS模式数据分burst获取的特点与GPU并行处理的优势相结合,大幅提升了数据处理效率.
参考文献
References
[1]Mittermayer J,Lord R,Borner E.Sliding spotlight SAR processing for TerraSAR-X using a new formulation of the extended chirp scaling algorithm[C]∥IEEE International Geoscience and Remote Sensing Symposium,2003,3:1462-1464
[2]Lanari R,Zoffoli S,Sansosti E,et al.New approach for hybrid strip-map/spotlight SAR data focusing[J].IEE Proceedings-Radar,Sonar and Navigation,2001,148(6):363-372
[3]De Zan F,Monti Guarnieri A.TOPSAR:terrain observation by progressive scans[J].IEEE Transactions on Geoscience and Remote Sensing,2006,44(9):2352-2360
[4]Xu W,Huang P P,Wang R,et al.TOPS-mode raw data processing using chirp scaling algorithm[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2014,7(1):235-246
[5]Xu W,Huang P P,Deng Y K,et al.An efficient approach with scaling factors for TOPS-mode SAR data focusing[J].IEEE Geoscience and Remote Sensing Letters,2011,8(5):929-933
[6]Prats P,Scheiber R,Mittermayer J,et al.A SAR processing algorithm for TOPS imaging mode based on extended chirp scaling[C]∥IEEE International Geoscience and Remote Sensing Symposium,2007:148-151
[7]Yang W,Chen J,Zeng H C,et al.A novel three-step image formation scheme for unified focusing on spaceborne SAR data[J].Progress in Electromagnetics Research,2013,137:621-642
[8]Yang W,Chen J,Liu W,et al.A modified three-step algorithm for TOPS and sliding spotlight SAR data processing[J].IEEE Transactions on Geoscience and Remote Sensing,2017,55(12):6910-6921
An efficient imaging algorithm for spaceborne TOPSAR data
GAO Heli1CHEN Jie1YANG Wei1LI Chunsheng1
1School of Electronic and Information Engineering,Beihang University,Beijing100191
AbstractBy steering antenna beam in along-track direction,space-borne synthetic aperture radar (SAR) can achieve wide swath coverage in Terrain Observation by Progressive Scans (TOPS) mode.In TOPS mode,the beam switches in range and steers along azimuth several times to perform wider swath both in range and azimuth.In order to obtain a whole imaging result with uniform azimuth intervals,the re-sampling operation is usually required,which means large computation load and low processing efficiency.In this paper,a modified three-step algorithm based on Graphics Processing Units (GPU) is proposed.Firstly,a new interpolation method is introduced into the de-ramp operation (the third step of the three-step focusing algorithm),which avoids the up-sampling operation and can conveniently adjust the azimuth interval of final images.Then,a parallel framework of GPU is designed to accelerate the imaging processing exponentially.Finally,experiments based on simulation data are conducted to verify the validness and efficiency of the imaging algorithm.
Key wordssynthetic aperture radar (SAR);terrain observation by progressive scans (TOPS);interpolation;graphics processing units (GPU)
收稿日期2019-10-16
資助项目国家自然科学基金(61861136008,61701012);中央高校基本科研业务费项目(YWF-19-BJ-J-304)
作者简介
高贺利,男,博士,研究方向为星载合成孔径雷达技术.gaohl@buaa.edu.cn
杨威(通信作者),男,博士,副教授,研究方向为星载合成孔径雷达技术.yangweigigi@sina.com
1北京航空航天大学电子信息工程学院,北京,100191
猜你喜欢
湖州师范学院学报(2022年4期)2022-05-30 01:23:26
安庆师范大学学报(自然科学版)(2019年3期)2019-09-09 02:35:16
西南石油大学学报(自然科学版)(2019年1期)2019-01-28 09:33:52
北京航空航天大学学报(2017年2期)2017-11-24 05:24:37
电测与仪表(2016年10期)2016-04-12 00:26:24
电测与仪表(2016年14期)2016-04-11 12:32:48
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19 06:55:27
电测与仪表(2015年19期)2015-04-09 11:32:44
重庆与世界(教师发展版)(2015年3期)2015-01-08 06:19:22
皖西学院学报(2015年5期)2015-01-01 03:10:30
