
多功能搭载自动化运动平台结构分析
2020-05-30 03:32严国平张高龙展泽斌
湖北工业大学学报 2020年2期
严国平,李 哲,钟 飞,张高龙,向 凯,郑 欢,展泽斌
(1 湖北工业大学机械工程学院, 湖北 武汉 430068;2 湖北省汉江河道管理局,湖北 潜江市 433100; 3 河南紫牛智能科技有限公司,河南 洛阳 471000)
割草机和牛粪机是人们生产活动不可缺的农业机械,国内外已有许多学者对其进行了研究。章杨彬[1]通过对割草机车架厚度尺寸进行改进,使其达到工况的强度要求。潘家伟[2]等针对渠坡上的杂草清除的问题,设计的一种桁架式割草机在控制割茬高度的情况下自动化割草的同时,也可将草收集起来。艾鸿滨[3]设计了一种新型的牛粪捡拾机,解决了机器功率计算误差对螺旋推进器驱动轴造成破坏的问题。占加林[4]等针对农场作业遇到的地形复杂、割草作业量大等问题,发明了一种前置摆动式割草机,实现了割草机行驶与作业分别控制。Michel Pirchio[5-6]等设计了一种电池驱动自主式割草机,提高草坪割草质量,减少局部噪音和污染。龚春晓[7]等针对人工捡拾牛粪劳动强度高、工作效率低的问题,设计了一种牛粪便捡拾车, 实现粪便的捡拾和输送的机械化。本文针对堤坡杂草过高、硬度较高、难以去除和牛粪过多会造成安全隐患的问题,设计了一种可以行走于堤坡处、多功能搭载自动化运动平台,并就该机的主要装置进行结构分析,为避免其实际生产过程中出现裂纹、变形等质量问题提供理论指导。
1 多功能搭载自动化运动平台的结构
本多功能搭载自动化运动平台主要考虑到机器适应在大坡度汉江堤上稳定行走。传统的运动平台通常使用轮组来为其提供支撑和移动的动力,而轮组碾压草坪并破坏草坪的美感,且遇到不平坦路面时,不能自由移动,影响了农业多功能搭载自动化运动平台的正常工作。本机采用以履带轮作为移动的动力装置(图1),与传统的轮组装置相比,履带的结构与草坪的接触面积更大,减轻了机器对草坪的碾轧,同时履带与地面的附着力增加,适应各种不同路况。
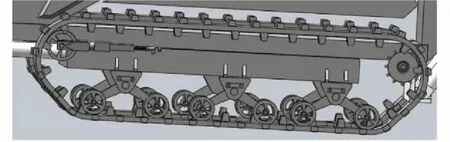
图 1 多功能搭载自动化运动平台行驶装置
多功能搭载自动化运动平台的三维图如图2所示。其框体采用模块化设计,搭载的作业装置采用前置式安装。动力源安装于运动平台的框体内。采用共用动力型,即发动机的动力源按照最优的比例分配,一部分用于提供驱动力,另一部分分配给装载设备以清除杂草或牛粪。自动运动平台工作时,可根据路况合理分配动力源,节能又省效。同时,考虑实际操作的便捷性、可控性及安全性,采用远距离遥控进行操作,降低了操作者劳动强度,同时也降低了人在运动平台上,(特别是涉及大坡度人工驾驶的工况)操作的危险性。因此,远距离遥控操作、履带式行走及框架模块体设计是此运动平台的总体设计思路。发动机在车架上进行固定,搭载装置放置在车体的前端,控制系统安装在车体后部。在该机正常运行中,自动化运动平台的主体尺寸和其移动速度与在行驶道路上通畅性和稳定性有关:车身过大会造成在较窄的草地上不便于割取杂草和拾取牛粪;车身过小则造成质量较轻,影响其稳定性。所以合适的车身主体尺寸十分重要的。
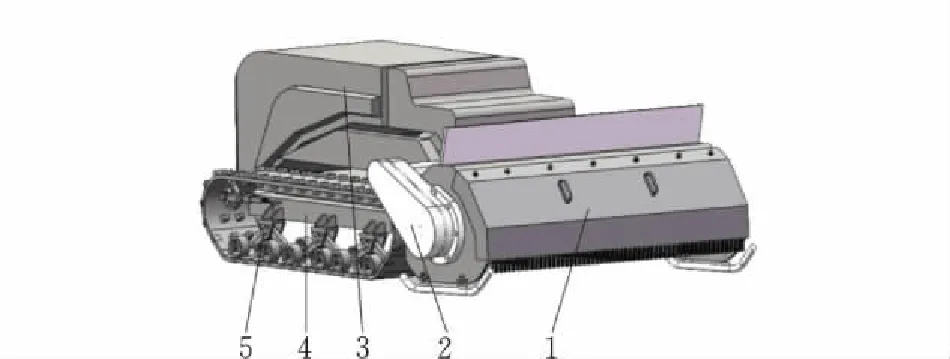
1-动力源转转装置;2-搭载连接装置; 3-车体动力集成;4-机架;5-行走装置图 2 多功能搭载自动化运动平台总体设计
2 多功能搭载自动化运动平台主要装置的仿真分析
2.1 车体机架的分析
车体机架在多功能搭载自动化平台设计中占据十分重要的地位。由于机架上不但安装有发动机,搭载设备等装置,且驱动车体运动的履带机构也安装在车架底座上的,在设计车体机架时应充分考虑每个零部件在机架上最优的安装位置,使多功能搭载自动化运动平台的整体布局紧凑合理。
多功能搭载自动化平台的车架主要承受自重、发动机,变速箱、各零部件及冲击载荷等外部载荷,一部分重量为200 kg,一部分重量为150 kg,总质量约350 kg。考虑到车体在凸凹不平地面行走时产生的额外负载,实际负载应乘以1.33的系数,即
F=350×9.8×1.33=4561.9 N
(1)
车架选择的最佳材料为Q235-A,主要材料参数见表1。
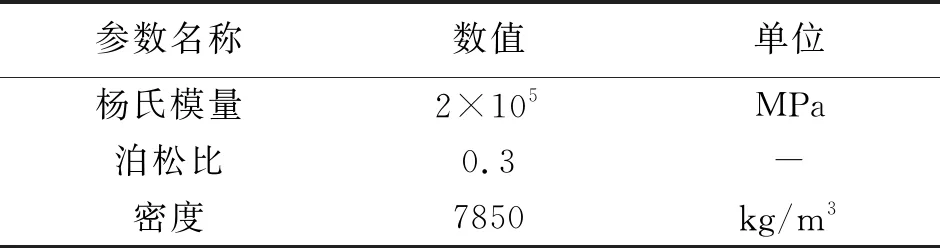
表1 有限元计算主要建模参数
为了便于单元的划分,对多功能搭载的自动化运动平台车架结构进行了简化处理。在车架后部,分别加两个向下的载荷,模拟平台上一部分部件的重量,在支承处加固定约束,模拟车架被水平支撑的状态。
根据上述计算条件,可以得到计算结果,从图3、图4中可以看到,运动平台车架Z方向变形最大约为5 mm,其产生的最大综合应力约为152 MPa,与其许用应力相比,相对安全。
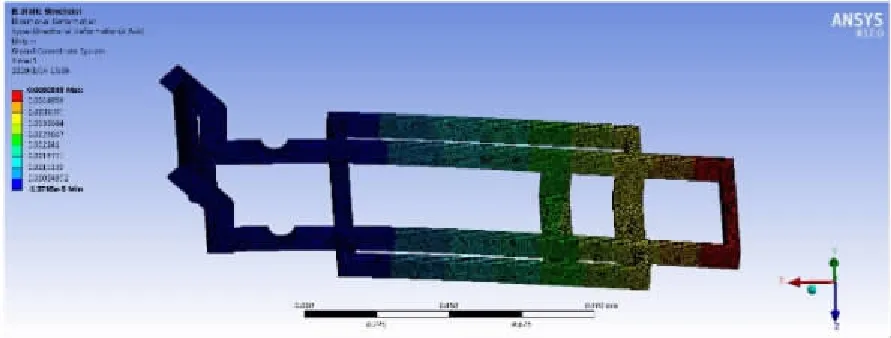
图 3 运动平台车架Z方向变形

图 4 运动平台车架综合应力
2.2 搭载割草装置的分析
平台搭载割草装置[8]时,工作过程中受力最大部分是滚轴耳片的根部。割草装置的滚轴由于在工作时转速过快,将会造成较大的离心力,而离心力主要集中分布在滚轴耳片根部,受到的拉力过大会导致耳片疲劳断裂。滚轴强度是一切作业的前提,为了使搭载的割草装置能正常工作,需要对其强度和刚度进行分析[9]。
前处理的方法与机架一致,施加位移约束及载荷,割草装置的滚轴材料选取为40Cr,其角速度为20 r/s,耳片处施加离心力载荷,其大小为296.73 N,方向是轴心连接销轴中心向外,同时还对其施加切向力,大小为18.064 N。其余参数选定同表1。进行仿真分析得到图5,从图5中可以明显看出,滚轴正中央的耳片处为最大受力处,其产生的最大变形量为0.0824 mm。在上述条件下,滚轴中心耳片根部为最大应力分布处,应力为9.362 MPa,远远低于600 MPa许用应力,相对安全。

图 5 滚轴耳片变形图
2.3 搭载拾牛粪装置的分析
搭载拾牛粪装置时,切割牛粪的螺旋刮板刀具是受力最大的部分,必须对其进行强度和刚度的分析[10]。
前处理方式与前述基本一致,对螺旋刮板的刀具径向施加载荷,大小为500 N,其余的参数同表1,得到计算结果云图6。从图6中可知,刮刀厚度为2mm时,最大变形量为3.952mm。在上述条件下为最大应力分布处。该处的应力为152.6 MPa,远远低于600MPa的许用应力,相对安全。
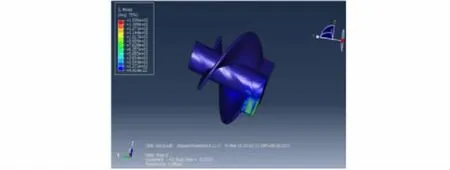
图 6 螺旋刮板刀具应力图
3 多功能搭载自动化运动平台主要装置的模态分析
3.1 车体机架的模态分析
由于机架上安装的汽油机、发电机及齿轮传动箱的工作频率,与机架的固有频率相等或接近时会影响机架的振动,甚至引起简谐振动,从而导致机架形变过大或损坏,因此对多功能搭载自动化作业运动平台模态分析十分重要。
运动平台车架材料属性与表1相同。其边界条件简化为在轴承支座上施加全约束,保证车架有固定约束[11]。
通过求解器求解,得出多功能自动化运动平台机架的前5阶固有频率(表2)。
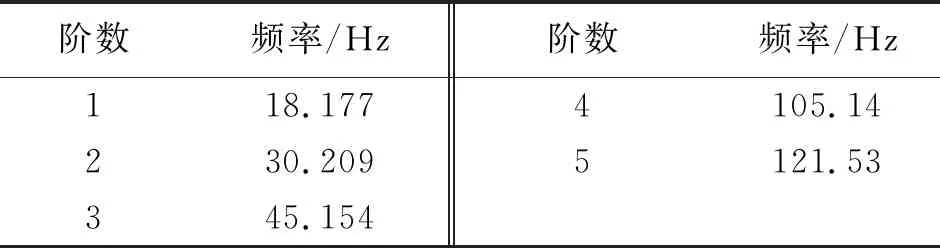
表2 车架的固有频率
一阶振型为机架上下振动,其振型形态见图7。二阶振型为整体上下振动。三阶振型为机架的扭转振动。四阶振型为机架上下振动、车轮轴前后振动。五阶振型为机架上下振动、车轮轴前后振动。
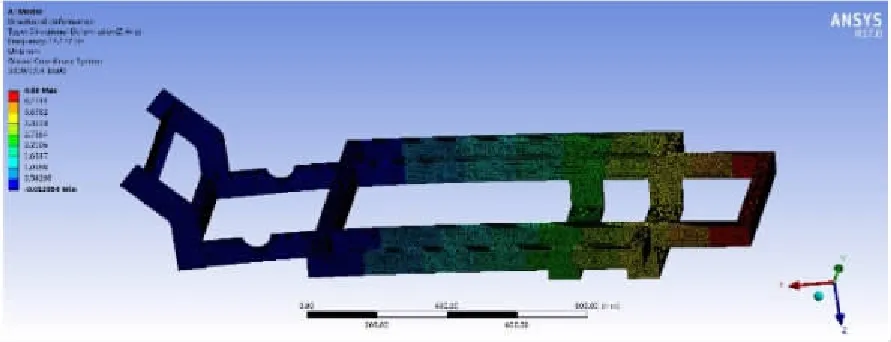
图 7 车架一阶振型
3.2 搭载割草装置的模态分析
割草机滚轴材料属性与表1相同。其边界条件简化为在轴承支座上施加全约束,保证滚轴有固定约束。
通过求解器求解,可得搭载割草装置的滚轴的前5阶固有频率(表3)。
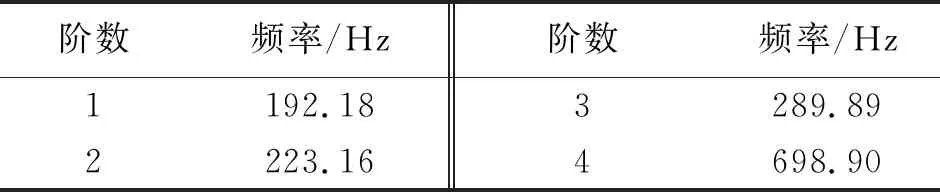
表3 滚轴的固有频率
多功能搭载自动化作业运动平台搭载的割草装置滚轴的一阶振型和二阶振型均为滚轴的弯曲变形,滚轴一阶振型如图8所示。由于其滚轴转速选取为1000 r/min,即频率为16.67 Hz,远小于一阶固有频率值,因此,滚轴转动时是不会发生共振的,割草装置可以正常运行。
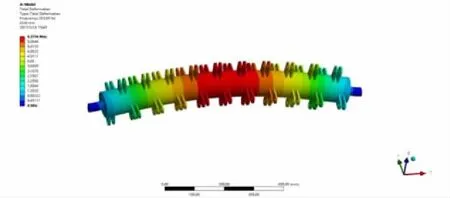
图 8 滚轴一阶振型
3.3 搭载拾牛粪装置的模态分析
螺旋刮板刀具材料属性与表1相同。其边界条件简化为在轴承支座上施加全约束,保证滚轴有固定约束[12]。
通过求解器求解,得到拾牛粪装置的螺旋刮板刀具的前5阶固有频率(表4)。
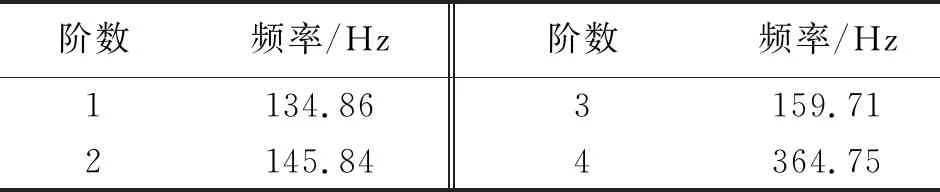
表4 螺旋刮板刀具的固有频率
平台搭载的拾牛粪装置,其螺旋刮板刀具一阶振形为弯曲扭转变形(图9)。转轴的转速选取1000 r/min,即频率为16.67 Hz,远小于一阶固有频率值。因此,平台搭载拾牛粪装置在工作时不会发生共振,可以正常运行。

图 9 螺旋刮板刀具一阶振型
4 多功能搭载自动化运动平台的现场测试
仿真设计出的多功能搭载自动化运动平台的现场测试如图10所示。测试效果良好:移动速度为0~5.7 km/h;搭载割草装置时,堤坡路况下割草效率不小于2000 m2/h,平地路况下不小于3000 m2/h;搭载拾牛粪装置时,牛粪基本被完全拾取,抛送高度均可达到1.5 m。该机可以很好适应割草和拾牛粪工况。

图10 多功能搭载自动化运动平台的现场测试
猜你喜欢
机械设计与制造(2022年10期)2022-10-12
建材发展导向(2021年6期)2021-06-09
矿山机械(2021年3期)2021-03-25
环球时报(2020-02-18)2020-02-18
家庭影院技术(2019年12期)2020-01-19
知识就是力量(2019年10期)2019-10-28
中国计算机报(2018年13期)2018-05-23
中国科技纵横(2015年14期)2015-10-31
中国新技术新产品(2014年1期)2014-11-16
钢管(2014年3期)2014-09-25
