基于ARM的小型舞台升降装备控制系统研究
2020-05-27 12:03任慧刘洋王会芹
中国传媒大学学报(自然科学版) 2020年2期
任慧,刘洋,王会芹
(1.中国传媒大学信息与通信工程学院,北京100024;2.视听技术与智能控制系统文化和旅游部重点实验室,北京100024)
1 引言
文化综合体建设是公共文化服务的重要载体,当前以基层小型文化综合体为建设目标,来振兴乡村文化,以提升文化自信。小型文化综合体内部功能装备是不可缺的,其中舞台升降装备是主要的核心装备。舞台升降装备控制系统主要以运动控制为主,其核心控制是实现多个升降装备的速度和位置的同步。整个控制系统可以分为管理级、过程级与现场级[1]。管理级一般包括工控机、控制台和控制按钮,完成对设备的控制、参数设置、状态监控和数据记录。过程级一般是控制主站,国内主要使用的是PLC,完成将机械设备的运行参数和监控信息传递到管理级设备并将管理级设备的命令传送至现场级设备。现场级一般包括变频器、电动机和远程终端,将采集到的信息上传给过程级,同时完成收到命令所指示的动作。
目前,国内舞台机械控制系统大量采用PLC 作为核心控制器件,在自动控制系统组成模式方面多使用“上位机+ 可编程控制器+ 驱动单元”的方式,而国外多采用“上位机+ 服务器+ 轴控制器+ 驱动单元”的控制方式。而在具体的舞台机械系统的控制方法上,大致可分为采用STD 工控机控制舞台机械设备、采用PLC 控制的舞台机械控制系统、采用模糊控制的舞台机械控制系统等。在这方面控制系统虽然先进,但是因为多采用工控机作为控制中心,工控机价格昂贵,并不适合小型舞台发展现状。而采用嵌入式技术为基础,使用ARM 芯片作为控制中心,在降低成本的同时,保证性能也达到国内舞台的控制要求。
2 基于ARM 的舞台升降装备控制系统研究方案
2.1 控制系统硬件设计方案
控制系统硬件设计方案采用了管理级+过程级+现场级的形式,在硬件组成有以下几个部分:
(1)ARM嵌入式上位机:采用STM32F407ZGT6作为上位机的MCU微处理器,此外还包括TFTLCD显示模块、SD卡存储模块、以太网通信模块、用于 扩展MCU功能的外围数据等。
(2)PLC可编程逻辑控制器:采用西门子S7-1512C紧凑型PLC,具体包括电源模块、主模块、数字量模块、模拟量模块,具有PROFINET通信协议接口和OPC UA服务器功能。
(3)现场控制电路:主要由按钮与显示灯组成,用于装台模式或者非演出模式下的简单控制,以及意外状态下的报警显示。
(4)变频器:采用Danfoss的FC302系列变频器,具有PROFINET通信协议端口、数字量模拟量模块与MCO305运动控制模块。
(5)电动机:采用三相异步电动机+编码器的方案,异步电动机功率为7.5KW,额定转速为1440r/min。编码器采用5V差分增量型编码器,具有A、B、Z脉冲信号以及各自的反向。
控制系统的总体框架图如图1所示,以嵌入式系统作为上位机,起到人机交互、存储数据、任务管理的作用。嵌入式上位机与PLC进行OPC UA通信,PLC对接收到的数据进行控制且生成新的数据。PLC与变频器进行PROFINET协议通信,变频器最终根据所接收数据和编码器反馈对电动机进行具体控制。

图1 控制系统总体框架图
2.2 控制系统软件设计方案
在控制系统硬件确定的情况下,需要进行的软件设计主要分为以下几个部分:
(1)嵌入式软件环境构建:包括对于FreeRTOS操作系统的移植、运行任务的分配、LWIP小型协议栈的配置、STemWin图形开发库的移植、open62541开源库的移植、SD卡配置、FATFS文件系统构建等。
(2)OPC UA通信客户端设计:应用lwip协议栈与open62541开源库,完成嵌入式设备与PLC设备之间OPC UA通信,包括通信信道和会话的建立、会话过程中的请求与应答等。
(3)用户操作界面设计:在使用StemWin的基础上,实现用户通过图形界面与设备进行交互,由对界面的操作达到对升降装备的复杂控制。
(4)文件系统设计:以FATFS系统作为基础,根据用户操作界面的设计方案和升降装备数据的实际格式,构建合适的舞台升降装备文件系统,以满足用户操作界面与SD卡之间的数据存储。
(5)PLC程序设计:在西门子Portal V15编程环境下,设计PLC程序以满足嵌入式上位机与变频器之间的具体数据处理和生成,同时需要配置OPC UA服务器与PROFINET网络,以满足通信需要。
(6)变频器编程:包括MCT10中的具体参数设置与APOSS中的运动模块编程,在通过PROFINET通信协议接收到PLC数据的前提下,完成对电动机的具体控制。
3 基于ARM的舞台升降装备控制系统实现
3.1 ARM上位机实现
(1)OPC UA通信客户端
OPC UA 作为对于传统OPC 通信方式的升级和改进,具有平台无关性、集成的地址空间、完善的安全机制等特点,适应了新时代工业控制的特点与需求[2]。
OPC UA 使用服务器、客户端通信方式。对其他应用暴露自己的信息的应用程序被称为服务器,接受使用其他应用程序信息的应用程序被称为客户端。同时,一个OPC UA 应用程序中可能同时包含服务器和客户端。通常情况下OPC UA 应用程序是一个要公开或使用OPC UA 数据的系统,该系统至少需要三个软件层次构成:具体应用功能、OPC UA 客户端/ 服务器SDK、OPC UA 栈[3],如图2所示。
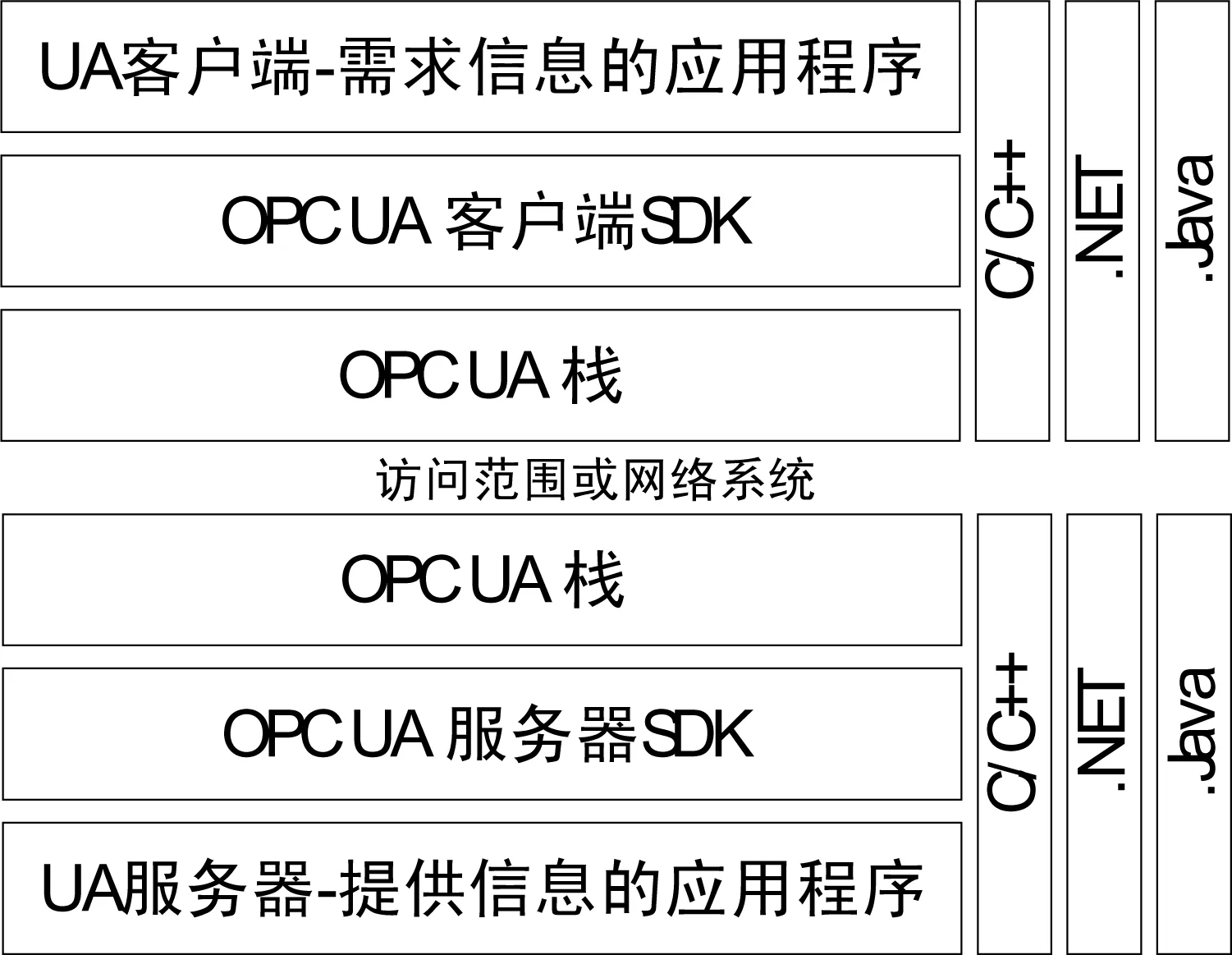
图2 OPC UA 软件层
OPC UA客户端与服务器进行通信的过程中,在程序上主要实现的服务为:客户端连接服务器程序设计;客户端与服务器间的读/写程序设计。
1)客户端连接服务器程序设计:在客户端任务中首先便是客户端连接服务器程序,完成客户端的创建和与服务器的连接。客户端/服务器的连接由三个嵌套级别组成:原始连接、安全通道和会话,如图3所示。
•原始连接通过打开到相应主机名和端口的TCP 连接以及初始HEL/ack 握手创建。
•安全通道在原始TCP连接的基础上创建,安全通道安全模式可以是“无”、“签名”或“信号加密”。
•会话在安全通道的顶部创建,确保用户可以在不以明文形式发送凭据的情况下进行身份验证。
2)读/写程序设计:无论是客户端对服务器的读/写服务,还是客户端连接服务器时的安全信道和会话的创建,本质上都在使用请求与响应程序。该程序通过发送请求、等待回应来进行客户端和服务器之间的交互,并通过状态码来确定信息收发的状态。请求与响应程序流程图如图4所示。客户端发送请求和服务器发送响应都是基于TCP的二进制协议,包括Message Header和Message Body。Message Header包含有一些基本信息,例如消息的长度、将消息关联到SecureChannel和每个请求到相应响应所需的信息。Message Body由数据类型的标识符开始,各个OPC UA服务都有请求和响应数据结构形式的签名。

图4 请求与响应程序流程图
(2)用户功能操作界面
用户功能操作界面的设计以便于操作和满足舞台升降装备控制需求为原则,以编写操作CUE为实现界面控制的基本元素。界面将整个演出分为剧目和场景两个概念来进行演出数据的编写、操作以及存储,设备的运行根据已编制的剧目场景来控制,且设备运行参数是通过场景来间接定义的。
用户操作界面是为了让用户可以在嵌入式上位机上能够方便地对舞台升降装备进行演出控制,根据舞台升降装备的特点设计了剧目和场景模式。
1)剧目:剧目模式下包含多个场景,剧目主要是对于一次演出活动的总称呼。
2)场景:场景代表演出过程中需要的不同场面和背景,这在用户操作界面上表示为具体的场景数据。单个场景的数据包括目标位置、速度、加速时间、减速时间等。
为了保证编制的剧目场景数据在ARM设备掉电后不失效,建立了SD卡存储系统,编写数据时将数据实时存储在SD卡中,重新启动后上位机设备也能够从SD卡中将之间编写的舞台数据提取出来。采用FATFS作为ARM设备的文件管理系统。
SD卡中的数据存储逻辑要与用户操作界面中的逻辑一致。在存储系统中,单个剧目由单个文件夹表示,文件名即场景名;单个剧目中往往包含多个场景,单个场景由单个文件表示,文件名即场景名。代表场景的文件中包含目标位置、速度、加速事件、减速时间4个参数,如图5所示。
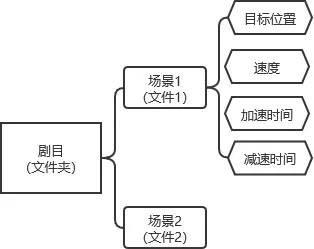
图5 文件系统数据结构
3.2 PLC与变频器下位系统实现
(1)OPC UA服务器与PROFINET通信
1)OPC UA服务器:ARM上位机设备与PLC进行通信的方式是OPC UA,ARM上位机作为OPC UA客户端,PLC设备作为OPC UA服务器。所以在PLC的配置中,需要打开OPC UA服务器,配置OPC UA服务器的参数如端口号、安全方式、会话超时事件等,且对于需要通信的变量开启读写权限。
(2)PID控制
在具体的电动机控制过程中,分为开环速度控制、闭环速度控制、转矩、过程等控制方式。MCO305控制模块支持的控制策略有两种,分别是开环前馈控制、闭环PID控制。
PID控制是指在系统控制中按偏差的比例、积分和微分运算来进行控制的方法[5]。PID控制器根据实际位置与设定点位置之间的差异计算出控制信号,从而最大限度避免位置偏差,因此MCO能够抵消负载或摩擦导致的变化。PID控制器对于抵消因开环前馈控制器的不准确设置所导致的任何位置偏差同样必要。因此前馈控制用于处理设定点参照值的变化,而PID控制则用于处理负载条件变化或前馈控制的不准确性。
PID控制器如图6所示,AV为实际速度;AP为从编码器反馈计算所得的实际位置;CP为当前位置设定点;CV为速度设定点;CA为加速度设定点。PID参数主要由比例因数KPROP、PID控制的微分值KDER、积分因数KINT、积分和的极限值KILIM、前馈速度FFVEL、前馈加速度FFACC组成。

图6 PID控制器系统
1)比例因数KPROP:比例因数与位置偏差相乘,再与控制信号相加,所计算控制信号与位置偏差成正比。
2)微分值KDER:微分值乘以位置偏差微分,然后将所得结果与控制信号相加,使用微分值可以增加系统的阻尼。
3)积分因数KINT:积分因数乘以所有定位误差之和,并将所得结果与整个控制信号相加。如果在控制中出现稳态位置误差,则应使用控制器中的积分部分。
4)积分和的极限值KILIM:积分和的极限值为控制器积分部分所生成的控制信号设限,以避免“积分饱和”。
比如,学完比例的知识后,教师为学生留下课后作业,将学校的平面示意图画出来。为了将这个作业完成,不仅要使用到比例的知识,还要学生自己测量学校各个部位的长宽,在图纸上清晰地标注出各部位的位置。这种课后作业紧密联系学生生活实际,囊括课堂所学的数学知识,还富有趣味性,激发出学生学习数学思想的积极性。待学生将学校平面图画出来后,教师可以让学生通过课余时间制作沙盘,再次将平面图立体展示出来,学生可以经历思维过渡流程,让学生接触到数学的本质,实现学生全方位发展的目的。
5)前馈速度FFVEL:前馈速度为一种与设定点位置导数相乘的标定因数,在应用中将运算结果与整个控制信号相加。
6)前馈加速度FFACC:将前馈加速度乘以设定点位置的二阶导数,然后将所得结果与控制信号相加,用于补偿使系统惯量加速/减速所使用的转矩。
(3)变频器MCO运动控制
Danfoss FC302系列变频器可以安装MCO305选件,MCO305是一个用于FC302的集成、自由编程运动控制器。
MCO305在变频器硬件上引出端子与编码器相连,编码器采用5V差分增量型编码器,具有A、B、Z 三相以及各自的反相。变频器在使用MCO 运动模块功能之前需要对相关参数进行设置,除了电动机的参数之外,还包括采用的控制方式、PID 控制参数、斜坡参数、编码器参数等。主要的参数设置如表1所示。

表1 变频器主要参数设置
在正确设置参数的前提下,MCO运动模块通过APOSS环境对接收到的运动数据进行判断、处理并形成具体的控制命令对电动机进行控制,以满足在剧目、场景的控制体系下能够完成对舞台升降装备的演出控制。具体的程序分为主控制程序、复位、错误中断等,根据程序逻辑,演出控制程序流程图如图7所示。

图7 演出控制程序流程图
4 结论
ARM 嵌入式系统具有低功耗、高性能以及稳定性强的特点,在众多领域都具有良好的前景与应用,可以非常有效地将设备小型化、便捷化。而OPC UA 作为OPC 标准的最新替代者,不受限于应用平台且满足大部分场景下的复杂数据需求,在未来跨网络、跨平台的工业自动化通信系统中有着良好的应用场景。本研究使用ARM 嵌入式设备作为上位机,通过OPC UA 和PROFINET 工业以太网通信将上位机与PLC、变频器相连接,构建了一个小型舞台升降装备控制系统。经过实验验证,小型控制系统功能齐全、性能可靠、操作便捷,满足舞台升降装备各项指标要求,具有广泛的应用前景。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
消费电子(2022年6期)2022-08-25
锻压装备与制造技术(2021年5期)2021-11-13
科学技术创新(2021年5期)2021-03-17
防爆电机(2020年3期)2020-11-06
——编码器
演艺科技(2020年7期)2020-08-13
电子制作(2019年23期)2019-02-23
车迷(2018年12期)2018-07-26
山东工业技术(2016年15期)2016-12-01
城市建设理论研究(2014年37期)2014-12-25