
膝关节康复机械腿的摆动控制研究*
2020-05-25 06:54:42周一鸣韩亚丽
机电工程 2020年5期
周一鸣,韩亚丽,吴 枫
(南京工程学院 机械学院,江苏 南京 211167)
0 引 言
下肢外骨骼是一种穿戴在人体下肢外部,对穿戴者下肢进行运动助力的结构。近年来,随着机器人技术和康复医学理论的发展,康复机器人成为研究的热点,国内外已进行了相关研究[1-4]。
针对下肢外骨骼康复机器人的控制,早期多采用基于预定的轨迹,由外骨骼带动穿戴者进行摆动控制[5]。其后,模糊PID、自适应模糊控制、鲁棒控制等相继应用于助行康复机器人系统[6-8],提高了机器人系统抗干扰性。康复医学的临床研究表明:有患者运动意图主动参与的康复训练,对于患者神经系统重建和运动功能康复更加有效。针对康复的初期患者,其肌力较弱,需机械腿提供较大的驱动力矩辅助穿戴者;而随着患者肌力的逐渐恢复,机械腿可以逐渐减小辅助力矩,发挥患者运动的主动性,加大患者的训练强度。
近年来,这种“按需辅助”对康复外骨骼实施控制的阻抗控制方法广泛应用于康复机器人系统中,例如:Lokomat、LOPES等[9-12]康复机器人系统都采用了阻抗控制方法进行康复训练。阻抗控制通过跟踪目标阻抗模型获得位置和力的控制,用于处理机器人和未知环境的交互问题中。机器人的导纳特性与机器人的阻抗特性正好互补,AGUIRRE等[13-15]采用导纳控制进行了外骨骼机械腿的控制研究,研究表明导纳控制能提高穿戴者运动频率;北京航空航天大学的刘棣斐等[16]针对所设计的下肢外骨骼,进行了基本导纳原理的仿真,结果表明:导纳控制减少了人机之间的交互力并实现了准确跟踪。文献[17]针对实验室设计的膝关节下肢外骨骼进行了基于等效惯量补偿的导纳控制研究,实验结果表明:膝关节外骨骼机械腿对穿戴者的运动能实现较好的运动跟随。
在下肢外骨骼的运动控制中,识别穿戴者的运动意图进行随动控制是其关键点。例如:日本的HAL系列外骨骼机器人[18]通过检测穿戴者下肢的肌电信号对下肢外骨骼进行控制;韩国的EXPOS系统[19]采用肌肉压力信号检测穿戴者意图,进而实施控制。尽管肌电信号具有相对于肢体运动的超前性,能对穿戴者运动意图进行预测,但需要进行运动标定,且穿戴麻烦,使用不方便;并且对肌肉信号减弱的偏瘫患者,其信号的提取较困难。
在前期的研究中,笔者所在实验室采用肌电信号进行穿戴者的运动预测,解决了摆动换向过程中运动的不平稳性问题。尽管解决了换向过程中的跟随滞后问题,但也发现对穿戴者进行肌电信号的粘贴过程麻烦。
基于前期研究基础,笔者在穿戴者与外骨骼机械腿之间布置力传感器,对穿戴者与外骨骼之间的交互力进行实时检测,并根据康复训练具有周期重复性的特点,基于自适应频率振荡器算法,从穿戴者摆腿运动中获取稳定的频率、相位运动模式信息,对穿戴者的下肢关节力矩进行估计,生成一个同周期的助力力矩,且在相位上和穿戴者下肢的肌肉力矩趋于同步,对膝关节外骨骼机械腿实施助力力矩的补偿控制。
1 膝关节外骨骼机构设计
笔者设计的膝关节外骨骼机构如图1所示。
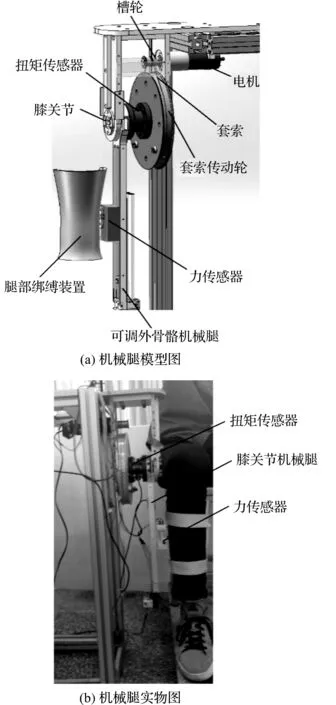
图1 膝关节外骨骼机械腿
图1中,笔者采用Maxon EC 40电机对膝关节进行驱动,并通过套索带动传动轮进行扭矩放大(槽轮与传动轮比例为1∶15);膝关节外骨骼机械腿上布置有扭矩传感器、力传感器、9轴传感器等,对机械腿的关节扭矩、穿戴者摆腿过程中与外骨骼机械腿之间的侧向力、机械腿的角度、角速度等进行检测。
摆动过程中,由传感器检测的侧向力Fi及力臂R,可获得外骨骼与穿戴者之间的交互力矩τi为:τi=Fi·R,交互力矩的检测为控制的实施提供重要的依据。
2 控制模型建立
膝关节外骨骼机构的控制系统如图2所示。
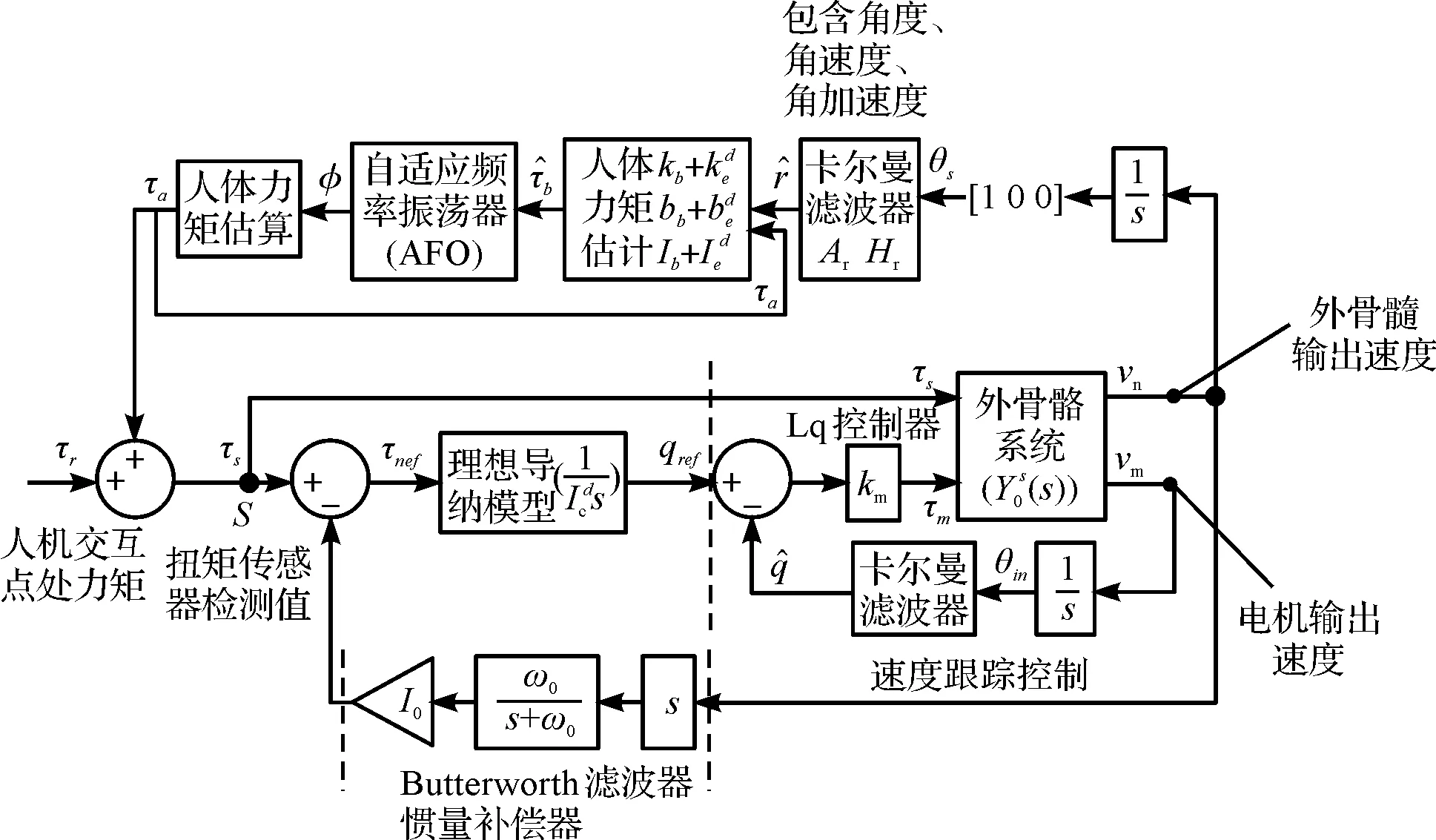
图2 膝关节外骨骼控制系统τi—人机交互力矩;τa—穿戴者的人体力矩估算;τnet—导纳模型力矩;qref—输出为关节参考角度;τm—电机驱动力矩;vm—输出为电机转动速度;vs—外骨骼机械腿转动速度;θm—伺服电机的转动角度;状态估算轨迹;vs—外骨骼机械腿转动角速度;ω0—转动角加速度截止频率;I0—可调放大系数后;Im—电机输出轴转动惯量;Is—外骨骼驱动系统输出的转动惯量;kc—弹簧弹性系数;bc—阻尼器阻尼系数;Ie—膝关节外骨骼机械腿的转动惯量;Ih—穿戴者腿部的转动惯量;S—扭矩传感器的安装点处;τm—外骨骼的驱动力矩;τs—扭矩传感器检测力矩;θm—电机输出角度,速度为vm;θs—膝关节外骨骼机械腿摆动角度,速度为vs
图2中:控制系统包含导纳模型、惯量补偿、基于自适应频率振荡器的人体力矩估算。人机交互力矩及穿戴者的人体力矩估算形成控制系统输入。导纳模型力矩经由理想导纳模型,输出为关节参考角度,且通过LQ控制器实现轨迹跟踪控制。外骨骼机械腿驱动系统的输入为电机驱动力矩,输出为电机转动速度及外骨骼机械腿转动速度。伺服电机的转动角度通过编码器检测,采用基于卡尔曼滤波的状态观测器获取状态估算轨迹。对外骨骼机械腿转动角速度进行微分,获得转动角加速度,对角加速度进行了一个Butter-worth低通滤波,使其截止频率为人腿正常摆动频率,经过滤波的数据乘以一个可调放大系数后,作为补偿扭矩反馈到导纳模型的输入端,作为惯量补偿。
此外,笔者通过检测出机械腿转动的角度、角速度与角加速度,并基于自适应频率振荡器对穿戴者的关节力矩进行估算,进行助力力矩补偿。
2.1 导纳模型
系统导纳模型如图3所示。
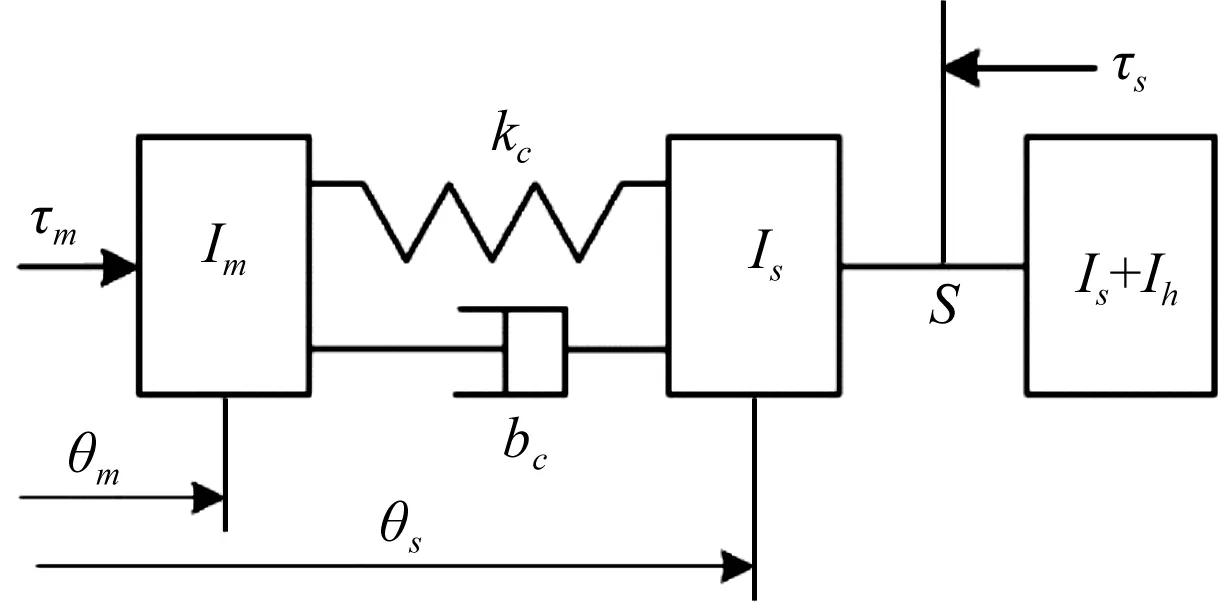
图3 导纳模型图
外骨骼系统输入力矩与输出速度的关系为:
(1)
根据图3,可得出动力学方程如下:
τm-kc(θs-θm)-bc(vs-vm)=Imsvm
(2)
τs-kc(θm-θs)-bc(vm-vs)=Issvs
(3)
(4)
(5)
图2中,输入力矩τnet经由理想导纳模型后,输出为关节参考角度qref,则力矩τnet与参考角度qref关系为:
(6)

图2中,关节参考角度qref通过LQ控制器实现轨迹跟踪控制,外骨骼的驱动力矩τm与参考角度qref的关系为:
(7)

(8)
2.2 惯量补偿
穿戴者在穿戴外骨骼后,由于外骨骼机构的重量、摩擦及惯量耦合在穿戴者的腿上,增加了人腿的阻抗,使其灵活性变差。外骨骼惯量的增加将减小穿戴者的摆动频率,进而导致穿戴者在康复摆动过程中的摆动速度降低,影响康复效果,因此对外骨骼进行惯量补偿非常必要。
惯量补偿的实施为:首先对外骨骼角速度微分,获得加速度并对角加速度进行Butterworth低通滤波,截止频率为ω0;然后用加速度乘以惯量增益I0作为反馈力矩补偿,即:
(9)
惯量增益参数为:
I0=αIh-Ie
(10)
式中:α—常数值。
2.3 助力力矩生成
对膝关节外骨骼控制的目的,是旨在实现机械腿能传递与穿戴者需求相匹配的控制力矩,到穿戴者的下肢。笔者通过自适应频率振荡器对穿戴者下肢关节力矩进行估计,生成一个同周期的助力力矩,且在相位上和人体下肢的肌肉力矩趋于同步,对膝关节外骨骼实施助力力矩补偿控制。
在进行人体关节力矩估计时,需要结合下肢外骨骼机械腿的角度、速度及加速度信息,所以笔者采用卡尔曼滤波估计获得最优状态估计值,即:
(11)
(12)
(13)
图2中,膝关节外骨骼的助力力矩τa(t)根据穿戴者人体关节力矩τh(t)生成,假设穿戴者在摆腿运动过程中具有较好的周期特征。笔者基于自适应频率振荡器[20],对穿戴者人体关节力矩τh(t)进行估计。
自适应频率振荡器公式如下:

(14)

(15)
式中:φ—振荡器相位;ω—振荡器频率;ε—耦合系数。
振荡器的跟踪误差e(t)如下:
(16)
把人体关节力矩τh(t)近似看成周期信号,进行傅里叶分解并重构,获得τh,rec(t)为:
(17)
式中:
(18)

(19)

(20)

τa=τa,ocosφ
(21)
式中:τa,o—力矩幅值常数。
3 机械腿摆动控制实验
笔者对一名身高175 cm,体重60 kg,年龄24岁的学生进行穿戴摆动实验研究,摆动实验参数设置如表1所示。
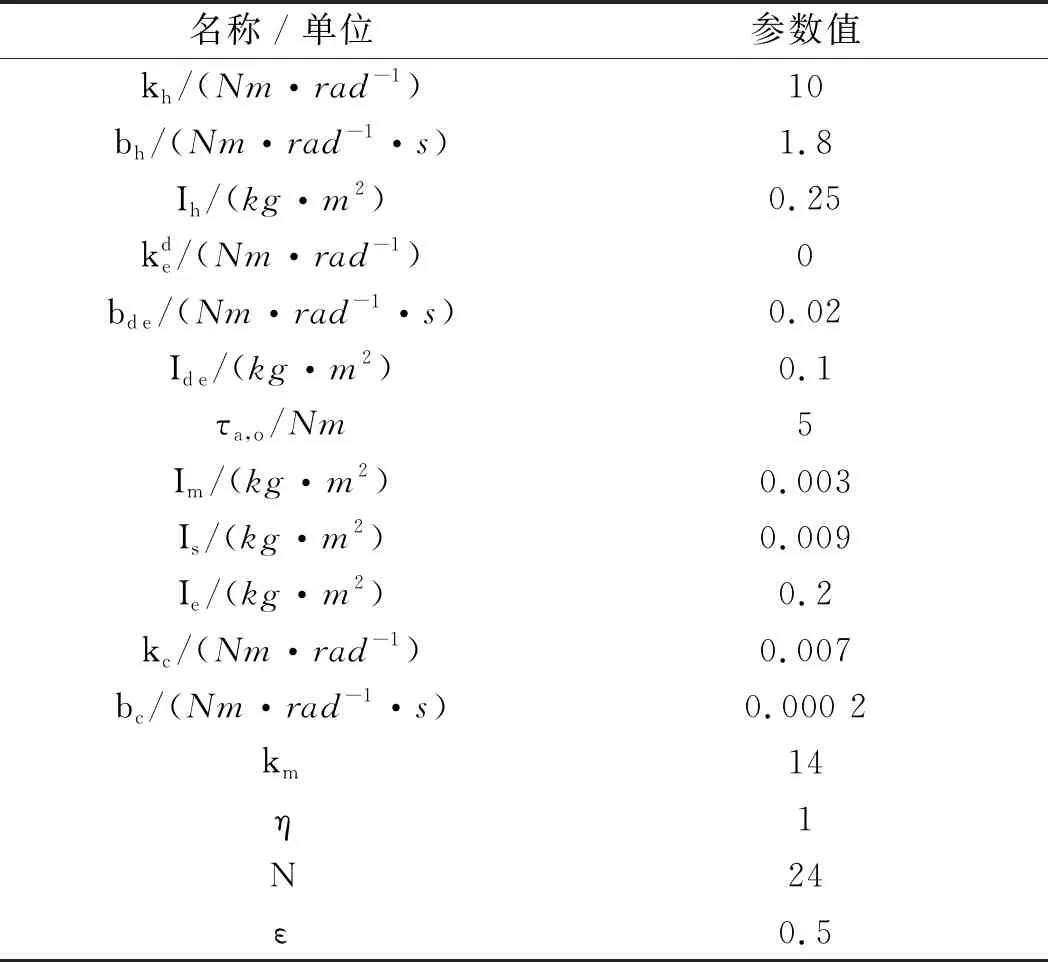
表1 系统参数
在摆动过程中,试验者的摆动频率ω尽量稳定在2 rad/s(0.3 Hz)附近,膝关节摆动过程中的角度、角速度及角加速度如图4所示。
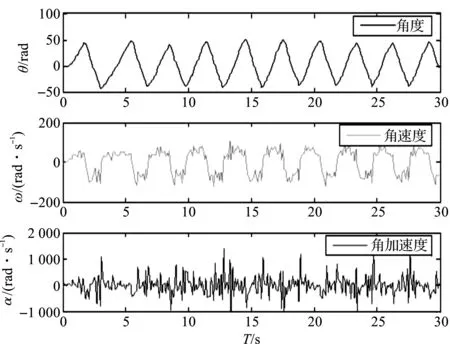
图4 穿戴者摆动过程中的角度、角速度及角加速度

图5 人体关节力矩估算值、重构值及摆动频率
从图5中可看出,重构的关节力矩τh,rec(t)能较好的跟踪估算的人体关节力矩,从而获得膝关节外骨骼的助力力矩。
膝关节外骨骼的助力力矩τa(t)如图6所示。

图6 助力力矩值
在实际的康复摆动过程中,穿戴者在开始的摆动阶段主动性较差;经过一段时间训练后具有了较为主动的摆腿运动;但经过一段时间的全力运动后,穿戴者由于疲劳,其主动摆动减缓。基于这种实际,康复运动中摆动腿的摆动频率先慢-后快-再变慢的运动特征,为了模拟实际的康复运动进行实验,笔者设置机械腿的摆动频率为:从2 rad/s(0.32 Hz)变到2.6 rad/s(0.41 Hz),再到2 rad/s(0.32 Hz)。
变频率摆动实验结果如图7所示。
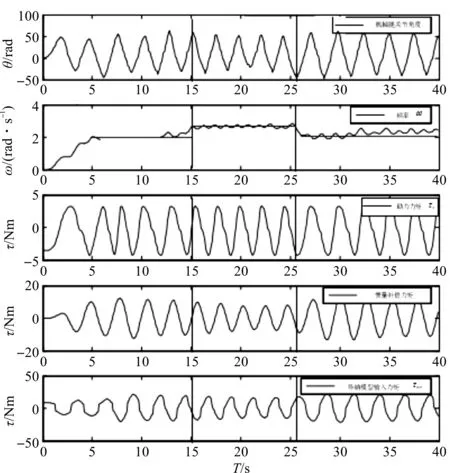
图7 变频率摆动的运动输出
从图7中可看出:在频率由2 rad/s变到4 rad/s后,惯量补偿力矩幅值明显降低,而在人腿降低摆动频率后(由4 rad/s变到2 rad/s),惯量补偿力矩幅值又明显增加,导纳模型的输入力矩τnet也有相同的变化趋势。惯量补偿力矩这种随着摆动频率增加呈现的幅值减小的趋势与实际需求相一致,因为当人腿主动运动意识不太强烈时,人腿会成为机械腿的运动阻力,控制系统增加惯量补偿,提供较大的助力补偿实现人机系统的摆动运动;当人腿摆动意识增强,摆动频率增加时,机械腿与人腿相配合,降低惯量补偿,发挥穿戴者的运动主动性,实现有效的康复锻炼。
从图7还可以看出:根据基于自适应频率振荡器生成的助力力矩τa值与关节角度值在相位上有较好的一直性,从而验证了控制方法实施的有效性。
为了评价控制系统对穿戴膝关节外骨骼后的康复助力的有效性,笔者进行了助力效果评价的实验研究。笔者采用分析穿戴膝关节外骨骼前后穿戴者的腿部肌电信号变化的方法,对两名健康的男性实验者分别进行有无外骨骼机械腿辅助下的腿部摆动实验。实验者腿部通过绑缚装置与外骨骼连接,然后进行跟随摆动实验,分别记录腿部摆动时股二头肌和股四头肌的肌电原始信号,并对信号进行均方根植(root mean square,RMS)分析。
在非辅助模式和辅助模式下,两名实验者EMG的RMS如图8所示。
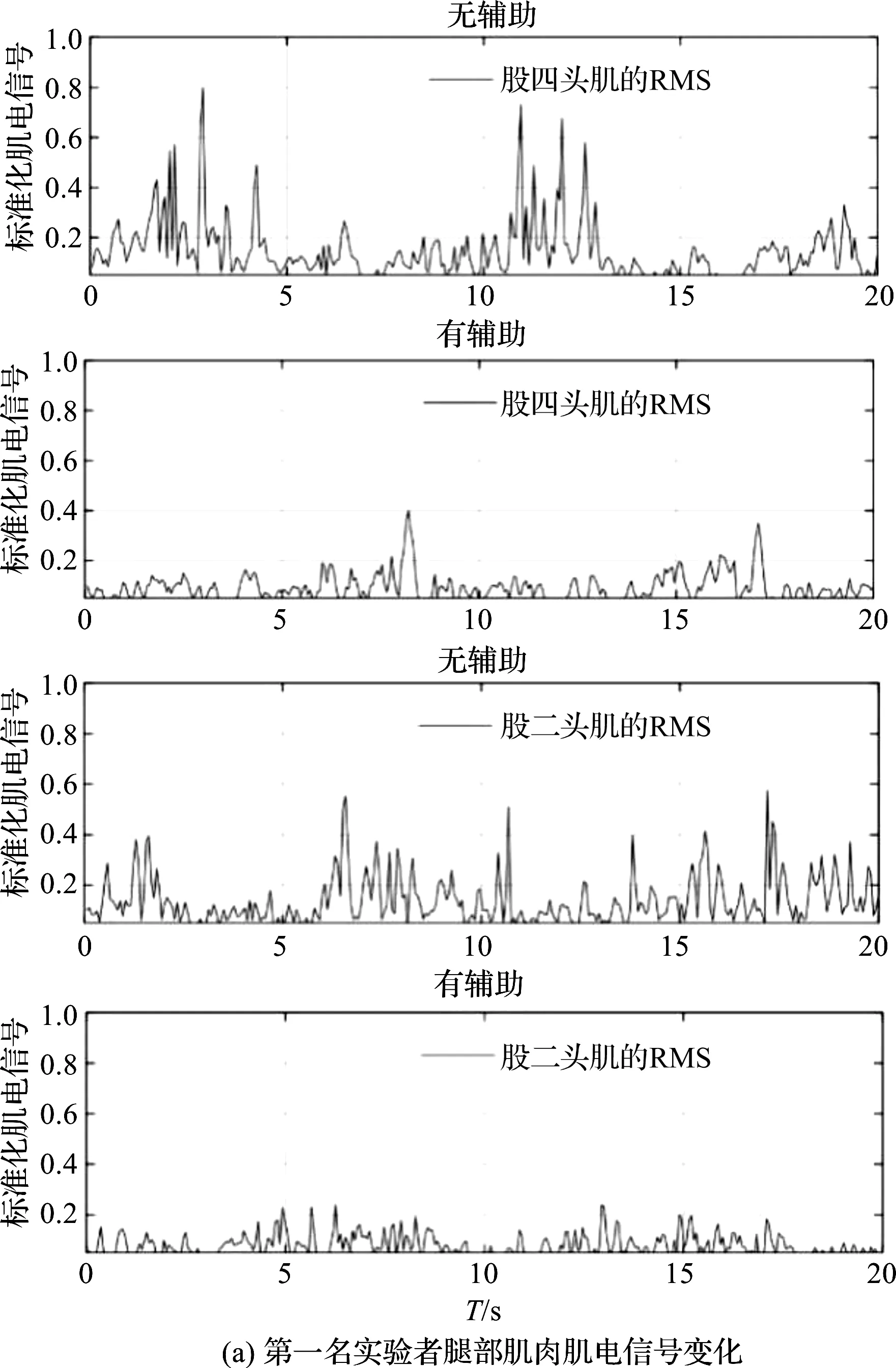
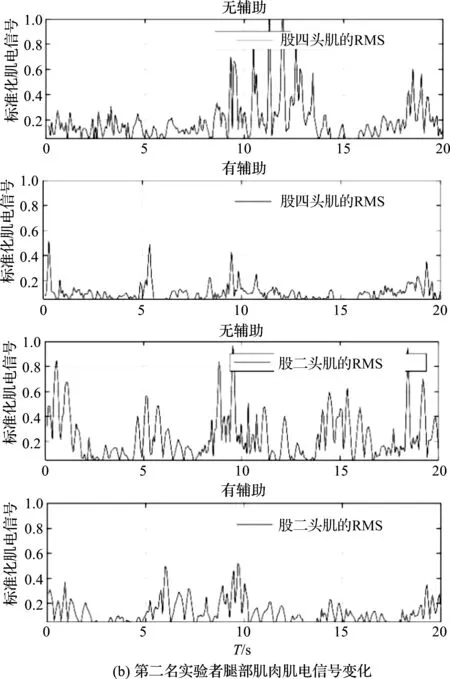
图8 两名实验者腿部机电信号变化曲线
实验结果显示:在辅助模式下EMG幅度显著减小,表明膝关节外骨骼对穿戴者实现了有效助力。
4 结束语
针对膝关节外骨骼机械腿的康复训练需求,笔者提出了导纳控制方法,根据康复训练过程中摆腿运动具有周期性重复性的特点,采用自适应频率振荡器,从穿戴者摆腿运动中获取稳定的频率及相位运动模式信息,对穿戴者的下肢关节力矩进行了估计,生成一个同周期的助力力矩,且在相位上和穿戴者下肢的肌肉力矩趋于同步,对膝关节外骨骼机械腿实施助力力矩的补偿控制。
根据实际康复运动中摆动腿的摆动频率先慢-后快-再变慢的运动特征,笔者进行了膝关节康复机械腿的实验。实验结果表明:外骨骼机械腿能模拟康复运动模式,实现较好的摆腿运动。
猜你喜欢
军事文摘(2024年6期)2024-02-29 09:59:38
现代电力(2022年2期)2022-05-23 12:46:16
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
高师理科学刊(2020年2期)2020-11-26 06:01:16
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
探测与控制学报(2015年4期)2015-12-15 15:00:56
