基于局部口径波前探测的大口径太阳望远镜次镜姿态校正方法
2020-05-25 00:23张志勇白先勇冯志伟王东光邓元勇
影像科学与光化学 2020年3期
荀 辉,张志勇*,白先勇,冯志伟,王东光,邓元勇
(1. 中国科学院 国家天文台,北京 100101; 2. 中国科学院大学,北京 100049;3. 中国科学院 太阳活动重点实验室,北京 100101; 4. 中国科学院 天文光学重点实验室,北京 100101)
追求更高分辨率是建造大口径天文望远镜的主要目标之一,然而随着口径增大,望远镜的桁架结构也越来越庞大。在望远镜不同指向过程中,由桁架弯沉和形变所产生的次镜相对于主镜的姿态变化,将导致像质退化,从而无法达到设计的分辨率。以目前正在研制中的“用于太阳磁场精确测量的中红外观测系统”(An infrared system for the accurate measurement of solar magnetic field,AIMS)望远镜为例,该望远镜为通光口径1 m的离轴格里高利系统,因采用了离轴光学系统,其桁架结构设计重量达到约6.8 t。根据AIMS望远镜设计公差要求,次镜相对于主镜平移量小于2.5 μm,倾斜量小于2″。然而在力热耦合有限元分析中发现,望远镜在对太阳进行跟踪观测的过程中,桁架因重力和温度等因素,次镜相对于主镜所产生的平移量达到数十微米,倾斜量达到3″,远超出望远镜公差范围,将严重影响光学系统的成像质量。
这种因结构形变所致的像质退化几乎是地基大型望远镜不可避免的共性问题。目前应对这种结构形变,通常的解决方法是采用夏克哈特曼波前传感器[1](Shack-Hartman wavefront sensor,S-H WFS)探测系统的波前像差,计算次镜相对于主镜姿态的失调量,然后采用精密多维位移台作用于次镜予以补偿。目前美国大熊湖1.6 m GST望远镜[2]、德国1.5 m GREGOR望远镜[3],以及正在建设中的4 m DKIST望远镜[4]均采用类似方案。然而对于太阳观测而言,波前探测技术面临两个方面的困难:首先是受限于白天较差的大气视宁度条件,大气扰动将导致图像的高频随机抖动,会降低提取次镜姿态变化信息的灵敏度和可靠性。其次,太阳是面源,在进行波前探测时,需要以一定视场内的日面特征作为信标进行相关计算。但当太阳表面没有黑子、暗条、谱斑等较高对比度的活动区时,基于相关算法的扩展目标波前探测会有较大的困难[5,6]。在太阳活动极小年阶段,日面没有明显活动区的情况通常会持续数月之久,这对太阳宁静区的观测研究极为不利。因此目前的方法还存在一定的局限性,应用效果并不令人满意。
针对上述的困难,我们创新性提出利用小口径平行光源构造人工星点,基于局部口径波前探测,实时校正望远镜次镜姿态的方法。因为望远镜主次镜面型由其机械结构和主动光学设计来保证,所以由面型变化导致的波前畸变通常忽略不计。而光学系统局部口径波前是全口径波前的子集,所以由次镜姿态失调导致的波前畸变信息亦包含在局部口径波前中。这种方法优势在于:其一,平行光源靠近望远镜入瞳入射,空气链路短,大气扰动对波前探测影响相对较小;其二,利用人工星点进行波前探测,可以不依赖低对比度面源的互相关计算,计算速度更快,准确性更高。
本文基于正在研制中的AIMS望远镜的实际参数,采用光学设计软件模拟和数学仿真协同分析的方法,建立了基于局部口径波前探测计算的次镜姿态校正量计算模型,验证了计算模型的正确性和该方法的可行性。本文研究可以为AIMS望远镜及未来大口径望远镜次镜姿态校正提供有效的数据支持。
1 局部口径次镜姿态校正方法及原理
1.1 次镜姿态校正方法
局部口径波前探测方法如图1所示,采用小口径平行光源构造人工星点,使其入射方向平行于望远镜主光线方向,且其出瞳靠近望远镜入瞳,入射望远镜的局部区域。在望远镜的焦面后设计准直光路,与波前传感器的参数相匹配,并在光路中放置对应波段的窄带滤光片。平行光源安装于精密平移装置上,可在进行校正时切入光路,校正结束后移出光路。次镜安装于精密六足位移平台上,实现姿态精密补偿。在进行校正时,移入折轴反射镜M3,将光路切换至检测光路。由主控计算机对获得的波前数据进行计算,并驱动精密六足位移平台进行补偿,以达到像质要求。

图1 基于局部口径波前探测次镜姿态校正方法示意图1. 主镜;2. 次镜;3. 望远镜入瞳位置;4. 六轴位移台;5. 平行光源;6. 太阳入射光线;7. 检测光线;8. 折轴反射镜;9. 视场光阑;10.准直镜组;11. 窄带滤光片;12. 波前传感器;13. 主控计算机
1.2 原理
1.2.1波前探测
在实际天文望远镜光学系统中,通常使用波前传感器探测波前信息,波前函数W通常表示为Zernike多项式[7]之和:
(1)
式中,M表示Zernike多项式项数,Zi(x,y)表示第i项Zernike多项式,ki表示第i项Zernike系数。
波前探测原理是:当标准平面波前入射微透镜阵列后,会形成一组分布规则的标准点阵,而当入射波前发生畸变时所成点阵会相对于标准点阵产生偏移,该偏移量对应各子单元波前的斜率。经过质心算法获得每个子单元像点偏移量,依据归一化算法将各个参数统一到待测系统坐标系,进一步可计算出光瞳面波前各个子单元对应的波前斜率[8]:
(2)
式中,(xn,yn)表示第n个子单元坐标,Δxn和Δyn表示第n个子单元像点坐标偏移量,f表示波前传感器微透镜焦距。
根据每个子单元的斜率(2)式建立超定方程组(3)式,再通过相应的算法[9]求解最小二乘解,即可得Zernike系数ki,最终得到重构的波前函数。
(3)
式中,N为成像子单元数,且N≥M。
1.2.2基于灵敏度矩阵法的失调量计算
光学系统中光学元件的位置参数偏离设计理想值将会引入波像差,因而这种波像差可以表示为元件位置参数的函数。由于失调量主要导致初级像差,而高级像差的变化相对于初级像差较小,因此光学失调量校正时基于初级像差信息,主要控制初级球差、彗差和像散。Zernike系数可以与常用的Seidel像差系数建立联系,系数k2~k9代表初级像差,其中k4代表离焦,k5代表0°或90°方向的像散,k6代表45°方向的像散,k7代表X方向的彗差,k8代表Y方向的彗差,k9代表球差,所以用于计算校正量的Zernike系数选取k2~k9。
基于灵敏度矩阵法[10,11],在失调量很小的情况下,光学系统的像差和失调量近似为线性关系。建立光学系统失调量与系统像差系数(Zernike系数)的关系,可获得灵敏度矩阵A。将光学元件沿x、y、z轴平移记为X、Y、Z,绕x、y轴旋转记为U、V。将望远镜初始设计状态记为理想波前,其Zernike系数设为Kinitial。当望远镜次镜姿态失调后,畸变波前Zernike系数为K,Zernike系数变化量为:
ΔK=K-Kinitial
(4)
在已知灵敏度矩阵A和ΔK条件下,可以建立方程组:
A·ΔP=ΔK
(5)
式中,ΔP=(X,Y,Z,U,V)T,ΔK=(Δk2,Δk3,…Δk9)T。
求解方程组(5)可得失调量ΔP,再输入精密六足位移平台以补偿望远镜光学系统次镜姿态失调。因此校正望远镜次镜姿态失调的步骤如下:
1) 由波前传感器探测获得点偏移量信息;
2) 经波前重构获得代表波像差的Zernike系数;
3) 采用灵敏度矩阵计算出导致像差的次镜姿态失调量;
4) 将数据输入精密六足位移平台,校正望远镜次镜姿态。
2 基于AIMS望远镜实际参数的仿真分析
2.1 局部口径选取
我们以正在研制中的1 m口径的AIMS望远镜主次镜光学系统为对象进行仿真分析,计算波前探测的灵敏度和精度需求,以验证基于局部口径波前探测校正次镜姿态的方法和应用于大口径太阳望远镜的可行性。AIMS望远镜为离轴格里高利系统,光路如图2所示,主镜为离轴抛物镜,次镜为离轴椭球镜,系统等效焦距为10 m。
在ZEMAX软件中,分别选取直径为150、200和250 mm的局部口径区域进行光学追迹,如图3所示。根据次镜位置公差表(见表1),模拟次镜单个姿态公差失调量,波前畸变如表2所示,其中λ=633 nm。由数据可见,在相同的望远镜次镜姿态失调量下,局部口径的波前畸变程度明显低于全口径,其数值近似于两者口径之比,即表明利用局部波前探测需要更高的探测精度和灵敏度。当次镜沿Z轴方向位移1.5 μm时,产生最小的波前畸变,200 mm局部口径的波前PV为0.071λ,约为λ/14。从数值上看,该畸变量仍在现有波前传感器的精度范围之内(通常能达到PV为λ/20)。因此结合性能参数和重量体积等实际因素综合考虑,我们选择200 mm局部口径区域进行波前探测。
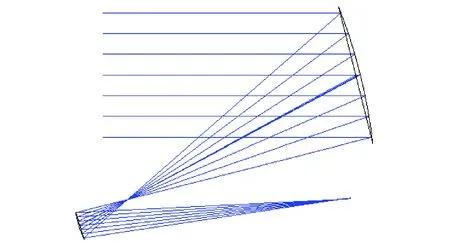
图2 AIMS望远镜光学系统

图3 局部口径波前探测光路
2.2 计算模型及结果
采用光学设计软件模拟和数学仿真协同分析的方法建立计算模型,流程如图4所示。
第一步,利用ZEMAX软件模拟局部口径的波前畸变。不失一般性,我们随机产生一组失调量(表3),针对AIMS望远镜200 mm局部口径进行波前探测模拟,可得理论畸变波前Wd的PV=0.1845λ,RMS=0.0436λ,Zernike系数如表4所示。

表1 AIMS次镜M2位置公差表

表2 入射畸变波前PV模拟结果
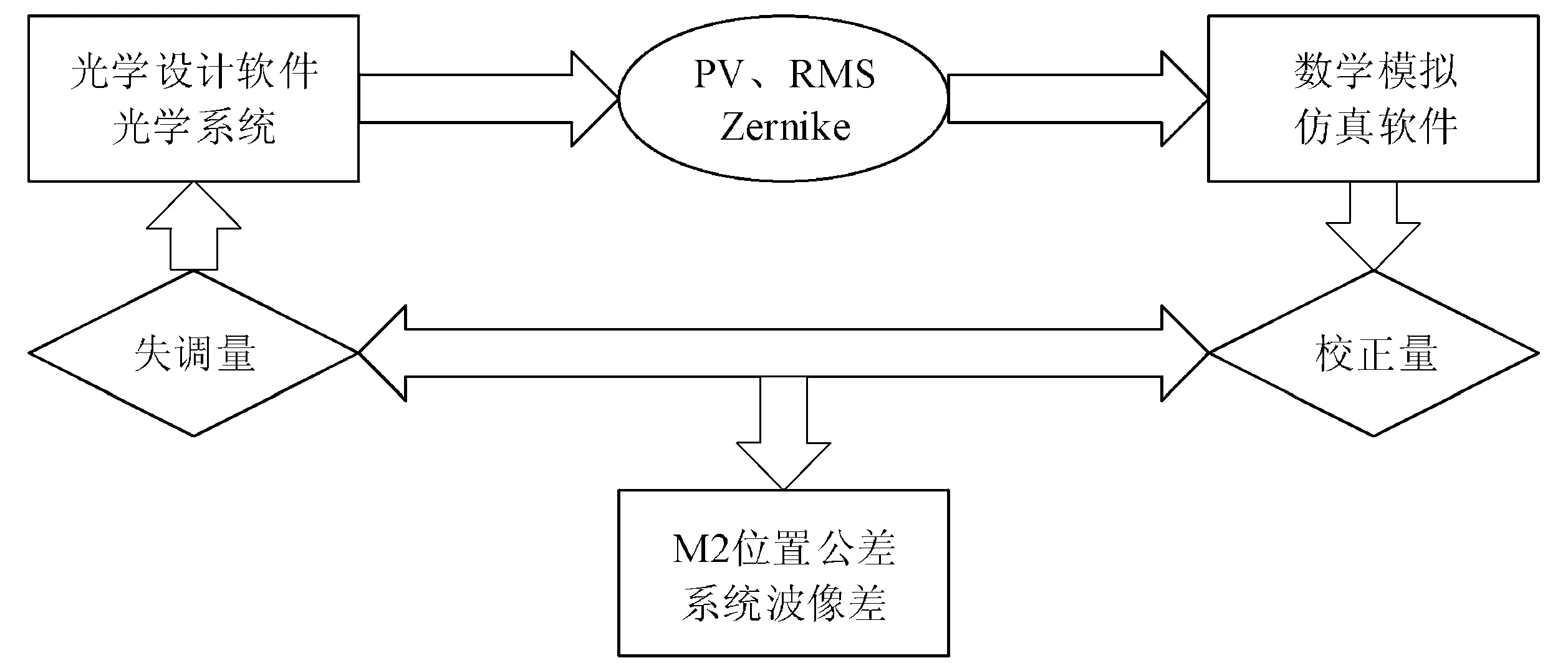
图4 计算仿真流程

表3 次镜随机施加失调量

表4 理论入射畸变波前Zernike系数
第二步,利用MATLAB仿真模拟波前传感器点阵坐标。我们选择口径为5 mm的波前传感器,微透镜阵列为10×10排布,每个子单元口径为0.5 mm,焦距为15 mm,其中有效子单元数76个。根据(2)式对理论入射畸变波前函数Wd求偏导数,可以模拟畸变波前在波前传感器每个子单元像点的理论偏移量;而后,利用理论点阵偏移量数据,分别模拟0.1、0.01和0.001 μm的点阵质心计算精度模型,以模拟获得不同测量误差条件下的点偏移量;最后由上述误差条件下的点偏移量,利用波前重构算法计算畸变波前Zernike系数。
第三步,基于失调灵敏度矩阵模型,根据上述波前重构的畸变波前Zernike系数,计算望远镜次镜姿态失调量,即为校正量。以此补偿已知施加的失调量得到校正后的望远镜次镜位置,以及校正后整个望远镜系统的波像差,如表5所示。分析校正后的望远镜次镜位置和主次镜光学系统波像差是否满足要求,并分析像点偏移测量精度与校正量计算误差间的作用规律。

表5 模拟计算校正结果
a表示望远镜主次镜光学系统全口径的波像差
根据模拟不同的精度模型可知,模拟测量点阵偏移量精度越高,次镜姿态失调量的计算越准确,残差越小。当点阵质心计算精度优于0.01 μm时,失调次镜经过校正后的次镜位置满足公差要求,表明当波前探测精度较高时,局部波前探测可以有效提取望远镜光学系统的像差信息,并且可以准确地计算出导致波前畸变的次镜姿态失调量。因为根据目前波前传感器产品水平和现有质心算法精度,点偏移量测量精度通常能达到上述精度要求,所以基于局部波前探测实时校正次镜的方法可行。
3 结论
本文基于望远镜局部口径波前探测方法计算次镜姿态失调量,采用光学设计软件模拟和数学仿真协同分析的方法研究了局部口径波前探测的灵敏度和可行性。根据AIMS望远镜实际参数的仿真结果表明,当选取直径为200 mm局部口径、波前传感器像点质心偏移探测精度达到0.01 μm时,即几百分之一像素,即可有效提取波像差信息,以此计算次镜姿态失调量并加以校正,可满足望远镜光学系统像差要求。本文研究成果为下一步实验研究提供数据保障,也将为AIMS望远镜以及未来大口径太阳望远镜研制提供技术参考。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
小哥白尼(军事科学)(2022年1期)2022-04-26
地理空间信息(2022年3期)2022-04-01
石油化工建设(2020年1期)2020-08-24
东南大学学报(自然科学版)(2020年1期)2020-01-16
计算机辅助工程(2018年4期)2018-10-09
自然资源遥感(2018年3期)2018-09-04
制造技术与机床(2017年7期)2018-01-19
摄影之友(影像视觉)(2017年10期)2017-11-07
人大建设(2017年9期)2017-02-03