太阳CO 4.6 微米红外成像观测
2020-05-25 00:25魏烨艳白先勇张志勇冯志伟
影像科学与光化学 2020年3期
魏烨艳,白先勇,张志勇,宋 谦,冯志伟,4*
(1. 中国科学院大学,北京 100049; 2. 中国科学院 国家天文台,北京 100101; 3. 中国科学院 天文光学重点实验室,北京 100101; 4. 中国科学院 太阳活动重点实验室,北京 100101)
太阳的红外波段分布着众多分子振动及转动谱带,对研究太阳分子谱线的辐射转移理论、研究太阳大气中的分子丰度、依靠分子谱线带的观测限制太阳大气温度模型和开展日震学研究等具有重要的意义。其中,形成于温度极小区的CO 4.6 μm波段是具有代表性的分子谱带,对该谱线带的成像观测有助于诊断温度极小区附近的大气特性,有助于研究太阳低层到高层大气的能量输运过程,有助于弄清日冕加热的物理机制[1,2]。
大气窗口中包含3~5 μm红外波段,这为太阳地基观测提供了可能。国际上很早就对太阳CO 4.6 μm谱线带开展了观测和研究,并取得了一些重要进展。地面观测最早开始于McMath-Pierce望远镜[3]。随着红外观测技术的发展,国际上CO 4.6 μm谱带的观测设备也在不断升级。例如,在探测器方面,从最初的单元热辐射计到InSb单元探测器,再发展到256×256和1024×1024 InSb面阵红外相机[4]。我国的太阳红外观测技术发展相对滞后,目前仅仅在近红外波段有过一些观测[5-7],对于3~5 μm红外波段的太阳成像设备和观测研究仍然是空白。
本文在国内率先开展3~5 μm波段的太阳成像观测技术和方法研究,建立了一套红外太阳成像观测系统。值得一提的是,该系统中采用的红外相机是基于国产HgCdTe焦平面阵列器件研制的。在探测器信噪比低、相机不均匀性极强的情况下,本文提出了一种通过有效计算平场提取观测目标的方法,利用该方法在国内首次获得了CO 4.6 μm的太阳单色像。
1 太阳红外成像观测系统
1.1 光路设计
太阳成像光学系统一般可分为跟踪系统和成像系统两部分:跟踪系统一般分为地平式和赤道式,主要为了使太阳像稳定在视场中心;成像系统通过成像镜使太阳的平行光聚焦在探测器上,以便于对太阳像进行分析。我们的跟踪系统采用的是中国科学院国家天文台怀柔太阳观测基地的定天镜系统,该定天镜系统类似于赤道式跟踪方法,它由两面平面反射镜组成,一面反射镜的镜面指向极轴方向,由电机控制,跟随太阳的移动而转动;另一面反射镜保持静止,用以捕获第一面反射镜反射的太阳光,将太阳光水平引入实验室内。然后通过一个成像反射镜和折轴反射镜,使太阳光在红外相机的焦平面上成像,光路如图1所示。
该光学系统为全反射光路。成像反射镜是一面口径为300 mm、焦比为F/11的球面镜。在4.6 μm波段,300 mm口径的衍射极限分辨率为:
=3.9″
(1)
1.2 窄带滤光片
由于需要拍摄太阳CO 4.6 μm谱带单色像,观测系统采用的是窄带滤光片,其可以去除大部分不需要的光谱信息。窄带滤光片购于SPECTROGON公司,其光学属性如图2所示,透过中心波长为4.637 μm,带宽0.211 μm。从图1中可以看出,窄带滤光片嵌于滤光片轮中,整体放置在焦平面探测器前。为了获得较高的信噪比,滤光片与探测器件均置于液氮制冷真空杜瓦瓶内,工作温度为83 K。
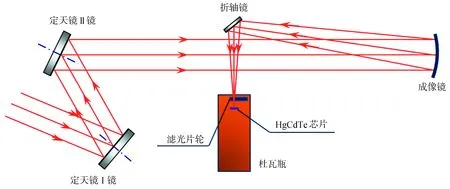
图1 成像观测系统光路示意图
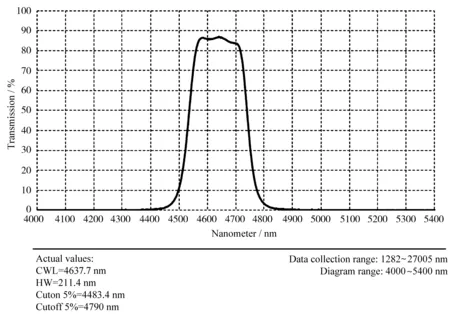
图2 滤光片参数(来自SPECTROGON公司产品参数)
1.3 3~5 μm红外相机
高性能红外探测器是红外天文观测的关键器件。由于国内高灵敏度红外探测器的研究水平发展缓慢,加之国外对红外探测器的限制,在一定程度上影响了红外天文观测设备的发展。观测系统中使用的红外相机是我们基于国内生产的一款HgCdTe焦平面阵列器件自主研制的,其工作波长范围为3~5 μm,像元尺寸为30 μm×30 μm,阵列规格为320×256,相机决定系统视场为10.1′×8.1′。为评估该红外相机的能力,我们建立了一套红外探测器性能测试评估系统,并在实验室完成了该红外相机的读出噪声、暗电流、光子转移曲线、线性、增益和量子效率等性能参数的测试[8]。测试结果表明,该红外相机的平均读出噪声为5149.37e-,暗电流约为1.126×107e-/(pixel·s-1),线性度为99.91%。从上述结果可知,该红外相机可以用于太阳CO 4.6 μm谱带的窄带单色成像观测,但由于读出噪声和暗电流较大,积分时间需要适宜选择。
2 观测结果及数据处理
2.1 观测结果
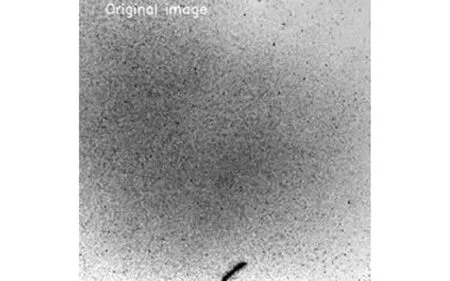
图3 成像观测获得的原始太阳黑子图像
利用上述观测系统,我们获得了中心波长为4.6 μm的太阳局部单色像,如图3所示。虽然肉眼可见黑子的形态,但由于红外波段的太阳辐射比可见光弱得多,并且该红外相机的读出噪声和暗电流较大,均匀性也较差,导致从观测系统直接得到的原始图像中无法辨别出观测目标太阳黑子的结构。因此,需采用一种有效的数据处理方法从原始观测图像中提取观测目标。
2.2 观测数据处理方法
在传统的天文数据处理方法中,针对探测器的不均匀性,通常采用平场改正的方法对原始图像进行处理,平场改正公式如式(2)所示[9]。
I=(Isun-Idark)/Iflat
(2)
式中,Isun为原始图像,Idark为暗场图像,Iflat为平场图像。根据该方法,首先需要均匀面光源获得平场。图3经过常用的平场改正方法处理后,仍然无法得到高质量的图像。经过分析,图像无法分辨观测目标的主要原因是探测器不同像素点的增益差别较大。成像系统探测器接收到的图像Si(x)与观测目标O(x)的关系可以认为是线性的,如式(3)。
Si(x)=g(x)×O(x)
(3)
g(x)为成像系统产生的增益,也是平场函数。限于观测设备,无法采用传统的随机移动太阳像多帧叠加的方法得到平场,因而我们发展了一套新的平场处理方法。仅采用一帧日面中心附近宁静区作为准均匀背景,通过观测黑子像减去准均匀背景识别出黑子。后续依靠探测器不同位置的黑子像计算不同图像之间的偏移,继而采用最小二乘拟合方法迭代出平场。
图4为观测目标提取和平场改正方法的流程图。
2.3 观测数据处理实例
在数据处理过程中,需要在平场改正之前得到暗场,去除背景噪声。观测拍摄时,先在日面中心附近宁静区拍摄一副图像作为准均匀背景[图5(a)]。再对不同位置的观测目标拍摄n帧图像Ai,并求出每帧的平均亮度,把背景图像的亮度分别调整到与图像Ai的平均亮度一致,得到去除背景的n帧图像Bi结果如图5(b)。
对n帧图像Bi进行图像配准处理,即得到观测目标在不同位置的相对位移量,这可以通过互相关或绝对差分算法中的任一种算法得到。根据得到的图像Bi相对位移量和观测目标的亮度,迭代运算出成像系统的平场,见式(4)。
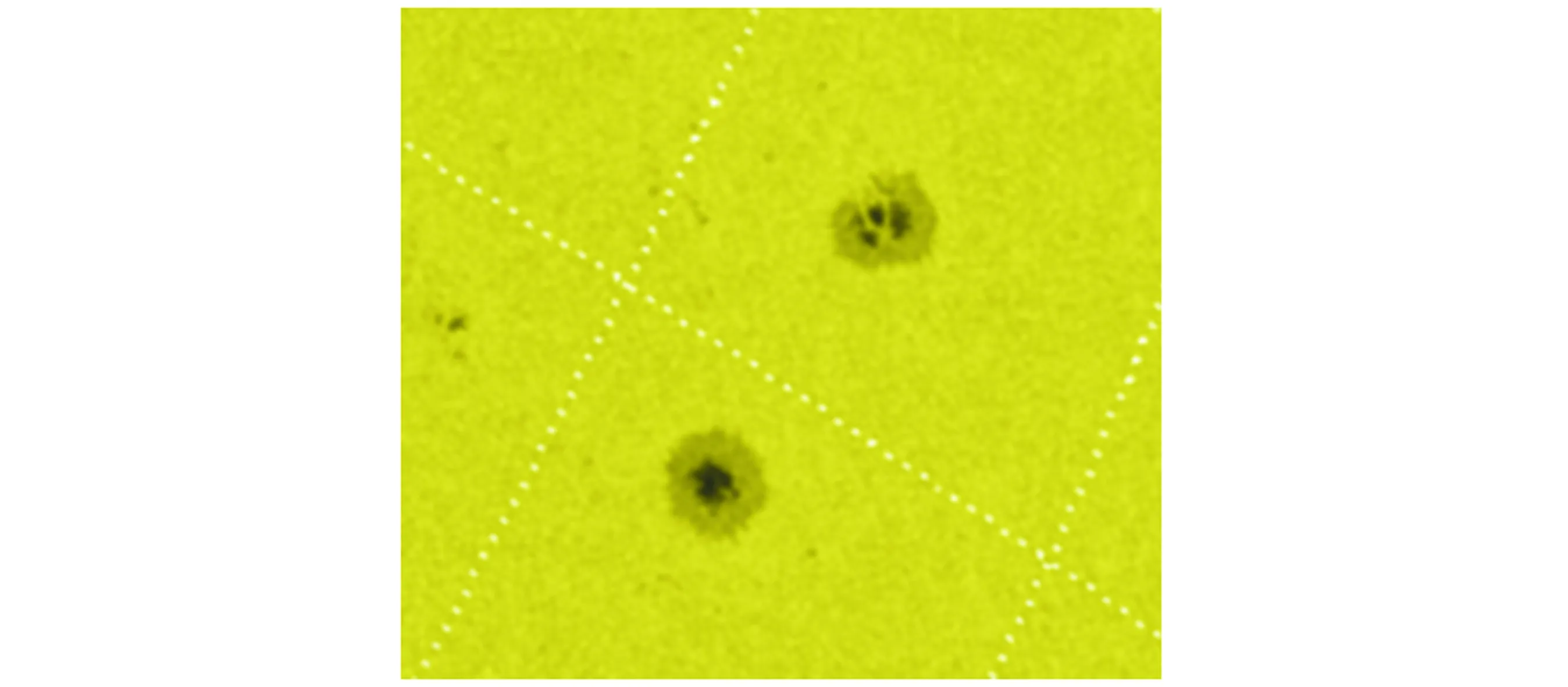
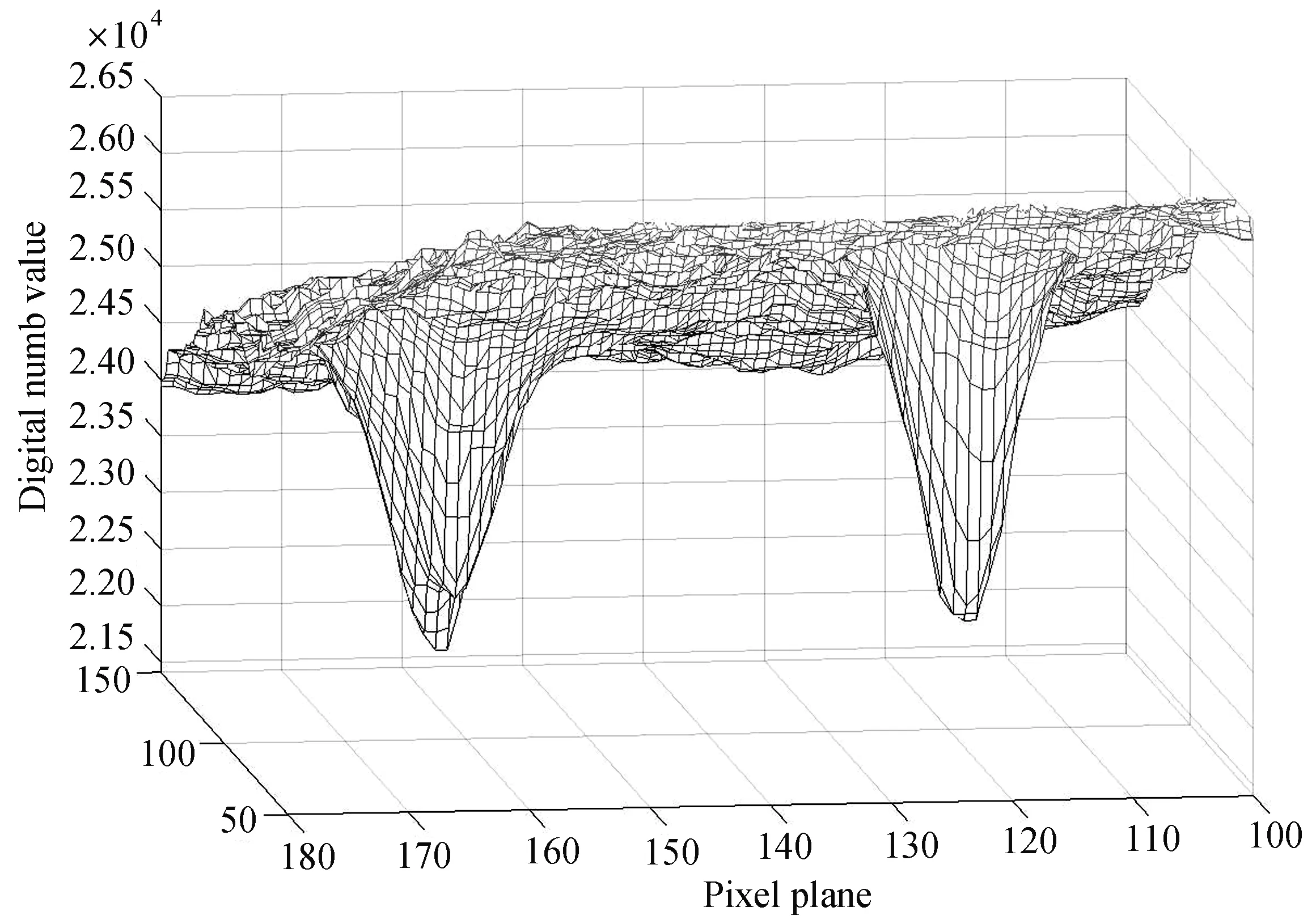
χ2=∑i -log[g(x+ai)]+log[g(x+aj)] }2 (4) 式中,ai表示第i幅图像观测目标的位移量,Si(x+ai)表示在第i幅图像中第x+ai个像元处对应的观测目标的亮度值,g(x+ai)表示在第i幅图像中第x+ai个像元处对应的像素产生的增益,χ表示最小二乘函数。从不同位置处,用最小二乘拟合的方法迭代出平场函数g(x)。 图4 目标提取和平场改正方法流程图 经过对n帧拍摄图像进行迭代计算求得平场,对观测目标进行平场改正之后的图像如图5(c)所示,从图中已经能够完全分辨出太阳黑子,并且还可以看到黑子的半影和亮桥。 图6为与观测结果对应的太阳同一位置处日振磁像仪(Helioseismic and Magnetic Imager,HMI)在同一时刻获取的617.33 nm附近连续谱单色像,该图像与观测图像进行对齐,两图对比可看出数据处理后的图像还原了黑子的部分特征。 图7是经过数据处理后图像的Digital Number Value图像,从图中可知,特殊平场改正方法能够准确提取观测目标,因而能够有效应用于增益差别较大的成像系统中。 图5 图像处理结果(a) 为拍摄得到的背景; (b) 原始图像经过扣除背景的观测图像; (c) 进行特殊的平场改正方法后得到的图像 图6 观测目标同一位置对齐处理后的HMI图像(来自SolarMonitor.org) 图7 MATLAB对处理后图像得到的亮度图 为了解决太阳在CO 4.6 μm波段红外成像观测问题,我们研究搭建了一套红外成像观测系统。系统光路采用定天镜跟踪引光,观测目标经过成像镜后成像在用国产HgCdTe焦平面阵列器件研制的红外相机焦平面上。受到红外波段观测的背景噪声影响,以及探测器不均匀性的限制,导致原始图像无法识别观测目标,于是我们提出了一种针对特定情况下的目标提取和平场改正的方法,最后获得了能够清晰分辨的CO 4.6 μm波段的太阳单色像,从图像处理的结果中可以看到更多的黑子细节,如半影和亮桥结构。利用建立的红外观测系统可以在后期继续开展太阳耀斑的红外成像观测研究。同时,为未来的高分辨率红外光谱观测研究提供了基础观测设备,也为其他波段的红外观测系统的建立提供了一些经验。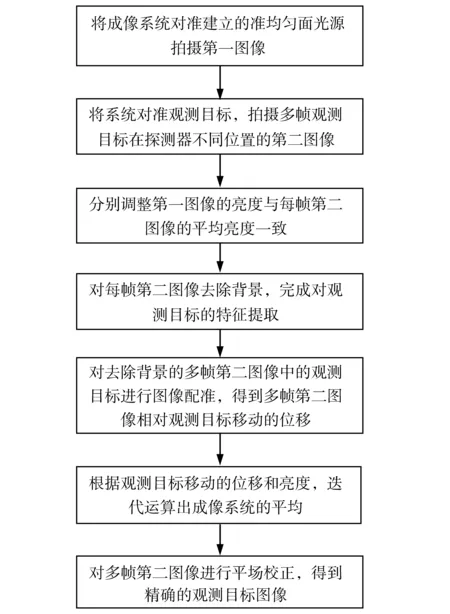

3 结论
猜你喜欢
环球时报(2022-05-23)2022-05-23
航天返回与遥感(2022年2期)2022-05-12
金桥(2021年4期)2021-05-21
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
小学科学(2019年12期)2019-01-06
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02