
基于db5小波分析的u-blox惯导信息去噪实现
2020-05-25 06:25于露马红皎罗近涛胡永辉
时间频率学报 2020年1期
于露,马红皎,罗近涛,胡永辉
基于db5小波分析的u-blox惯导信息去噪实现
于露1,2,马红皎1,罗近涛1,胡永辉1
(1.中国科学院 国家授时中心,西安 710600;2. 中国科学院大学 电子电气与通信工程学院,北京 101400)
使用快速傅里叶变换、功率谱密度法、Allan方差分析法对UBLOX-EVK-M8U的微机械惯导器件进行了频域与时域的分析,获得了其随机噪声的主要来源为量化噪声、角速度随机游走和零偏不稳定性。在对噪声特性分析的基础上,采用小波变换进行滤波处理。简单介绍了db5小波的基本原理,对不同小波变换的去噪效果进行分析比较,并找到了最佳匹配类型。最后设计了一种基于db5小波的处理方法,该方法可以有效去除加速度及角速度的噪声,其仿真结果表明,db5小波5层分解在方差和波形相似度等方面均有明显改善。
u-blox;Allan方差;小波分析;惯性导航
0 引言
惯性导航技术是目前组合导航领域的一个重要研究课题,其成本低、短时精度高,且不受外界环境限制[1],适用于短暂无法获得卫星导航的各类情况。因此,在军、民导航定位方面得到了广泛的应用[2-7]。特别是近年来城市道路迂曲复杂,立体度逐渐增加,适用于汽车导航的场景逐渐丰富,市场规模不断扩大,对导航产品的需求越来越多。瑞士u-blox公司研发的第5代u-blox芯片被奔驰、宝马、法拉利、保时捷等汽车厂商采用。u-blox也是欧洲汽车GPS导航委员会及伽利略委员会委员,参与制定欧洲汽车GPS导航专业标准制定及修正。该公司导航产品丰富,使用场景丰富,导航精度与价格相称,世界范围内市场接受度较高。
本文选择UBLOX-EVK-M8U的集成器件作为研究对象,该器件的外接天线中集成了微机械陀螺仪和加速度计,在提供卫星导航信息的基础上还能提供惯性传感器的原始信息。M8U的外接天线可以直接与汽车等物体的金属外壳通过磁吸式连接,成本较低,使用方便。在对导航精度要求不高的汽车导航情境下可以直接使用,不需要额外的高精度高成本的惯性设备。国内关于M8U的文献不多,尤其u-blox所使用的微机械惯性传感器的性能研究方面,因此本文对M8U的惯性器件进行相关研究分析。
该器件的惯性传感器输出信息与常见微机械惯性传感器的误差特征相似,存在量化噪声、速度随机游走和零偏不稳定性等误差。这些噪声和误差将直接影响导航精度。因此,有必要对噪声及误差进行消除处理。在信号去噪的研究中,可对噪声进行分析再根据噪声主要来源选择滤波方法。本文采用3种方法对M8U的惯性器件的原始信号进行处理,通过频域和时域两个方向开展研究。首先对原始信号进行快速傅里叶变换(fast Fourier transport,FFT),研究其静态条件下的频率特性,再求功率谱密度(power spectral density,PSD),进一步对其频域特性进行探究。在时域方面,采用Allan方差分析其静态特性。Allan方差在分析随机误差尤其是陀螺仪误差方面被广泛使用[8-16]。针对M8U的惯性传感器的主要误差来源进行分析,利用Allan方差分析u-blox惯性传感器输出的加速度及角速度信息,分析其主要误差项。经过时域及频域的分析后,根据其时频特性,对其进行滤波处理。在滤波处理中,选择了不同小波变换,对不同小波变换的去噪效果进行分析比较,找出了一种去噪效果最好并且不会对原始信号造成太大影响的小波变换类型,即db5小波变换,该方法可以有效去除加速度及角速度的大部分噪声。
1 u-blox惯性传感器噪声分析
本文所使用的是u-blox公司生产的M8U集成器件,如图1所示。它的重要优点之一是能简化导航产品的开发与安装。M8U的外形为长方体,天线有磁铁可以吸附在磁性金属表面,不需要额外特殊的安装或连接,它还具有智能感应和连续自我校正功能。其他特性包括:亚秒级的即时更新率,原始传感器数据的高速存取[17]。

图1 u-blox公司的UBLOX-EVK-M8U
M8U器件以亚秒级以下为间隔输出内部惯性传感器信息,该信息按照u-blox公司UBX协议标准传输。M8U通过连接PC端U-center软件存取需要的导航及传感器信息。M8U提供的原始传感器信息如包括陀螺仪、、3个方向的角速度信息、陀螺仪温度信息,加速度计、、3个方向的加速度信息。经过实验发现、、3个方向的陀螺仪角速度信息具有相同的统计特性,因此本文中部分结果仅对方向角速度信息作举例说明。
惯性元件的观测误差包含两个部分:系统性误差和随机性误差。系统性误差包括偏差、尺度因子误差以及惯性元件非正交引起的误差等。随机误差一般是由随机干扰引起的,不能用确定的函数关系来表达,因此只能通过统计模型来描述。在实际应用中,随机误差统计模型的参数确定存在较大难度,因而惯性元件随机误差成为影响导航主要的误差源之一[18]。
本小节对系统性误差和随机误差统一进行了分析和处理。首先介绍用于分析和处理惯性元件随机误差的几种方法,并且给出了相应的原理,然后利用功率谱密度和Allan方差详细分析了陀螺信号中几种性质不同的随机误差,并且对实测的3个方向的陀螺仪信号的随机误差进行了分析。
首先,将M8U器件及外接天线放置在水平桌面,采集惯性器件输出的原始信息,经过对ubx文件协议解析后,可以直接获得实测陀螺仪和加速度计的原始信息。如图2所示为2019年3月4日上午采样的加速度计和陀螺仪输出的原始数据。第1节中举例都会使用本次数据作为分析对象。

图2 M8U陀螺仪与加速度计原始数据
1.1 u-blox惯性器件频域噪声分析
傅里叶变换是时域到频域相互转化的工具,是频谱分析的基础。从物理意义上讲,傅里叶变换是将信号分解成许多不同频率的正弦波的叠加。
其逆变换为
首先对原始信号进行频域分析。在对信号进行频域分析时,最常用的方法是快速傅里叶变换(FFT)。该变换1965年由J. W. 库利和T. W. 图基提出。
对该器件输出角速度及加速度原始信号进行快速傅里叶变换得到图3,将轴的0点稍微右移一部分,方便观察。通过对原始信号的分析可以发现,原始信号中主要由两部分组成。第1部分是存在于零频至低频部分的有用信号,即静态条件下的陀螺仪输出的3个方向的角速度。第2部分是噪声信号存在于中高频部分。
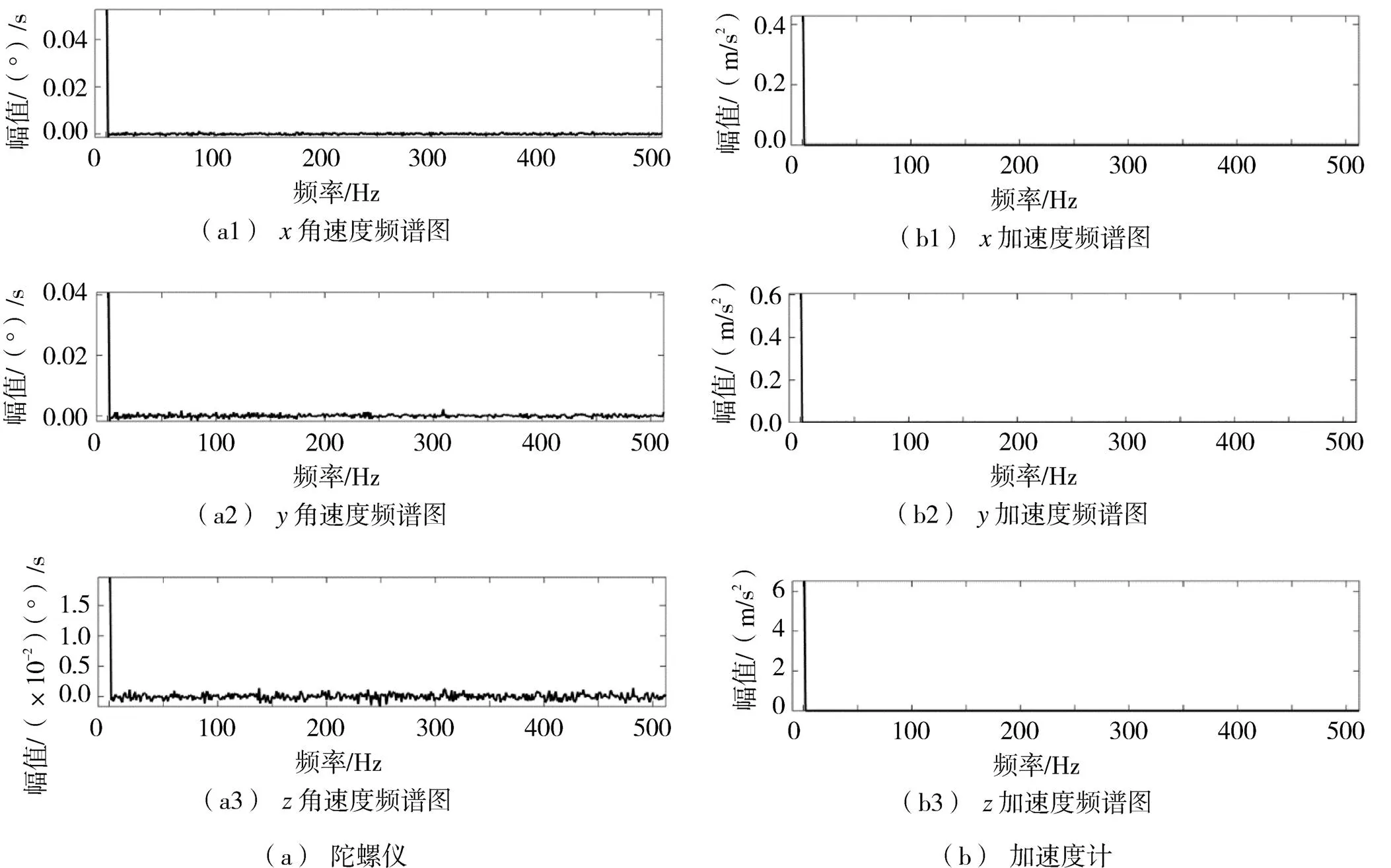
图3 陀螺仪与加速度计FFT变换结果
由图3可以看出,除0频附近的大量信号能量外,M8U还具有一些中高频的噪声。接下类使用功率谱估计函数计算原始信号功率谱[19]。

对原始数据求功率谱密度的结果如图4所示,所得结果与FFT变换结果一致。原始信号中的能量可以大致分为两个部分:第1部分是能量最集中的部分,为零频附近的有用信号,即静态条件的陀螺仪输出的x方向角速度信息;第2部分是由中频至高频的噪声信号组成。
1.2 u-blox惯性器件时域分析
经过上述频域分析方法后,可以得知M8U的主要误差集中在中高频部分,但是误差来源不是很清晰。20世纪60年代,为了确定原子钟钟差特性,由美国国家标准局提出了一种时域分析技术—Allan方差分析法。Allan方差能够比较容易地表征和辨识各种误差源的统计特性。

Allan方差与功率谱密度之间存在如下关系[20]
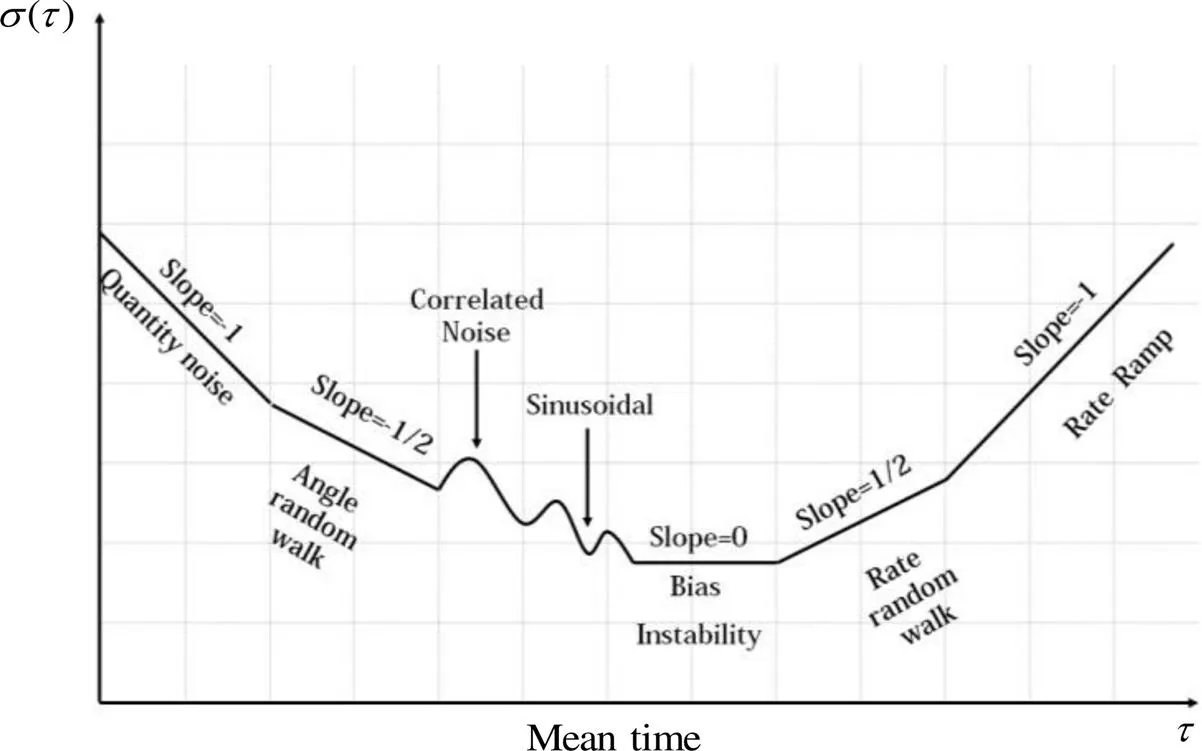
图5 随机噪声方差图


图6 原始数据Allan方差
参照文献[20]中Allan方差与各项误差对应关系,结合图9可以得出如下结论。
角度随机游走误差是由速率随机白噪声积分引起的具有随机游走特性的误差增量,是高频信号,可用白噪声表征[9]。而零偏不稳定性则用1/噪声或者其他低频漂移表征[14]。
2 小波阈值去噪分析及降噪
本文中的信号通过第1小节的分析,包括FFT变换、功率谱分析、Allan方差分析后发现有用信息大量存在于零频附近,中频至高频部主要是噪声,如图2和图3所示。原始信号中的误差项包括量化噪声、角度随机游走、偏置误差、速率随机游走。
小波分析(wavelet analusis)是20世纪80年代发展起来的一门新兴数学分支,是当前数学领域中一个迅猛发展的新方向,是20世纪数学研究成果中杰出代表之一[21]。利用小波变换进行信号去噪实质上是增强信号的有用部分,抑制无用部分。通常有用信息集中在低频。因此,采用小波变换对原始信号进行去噪处理,而不用对原始信号噪声进行建模,也可以获得比较好的去噪效果。
在实际信号处理过程中,小波变换相比其他变换具有下列良好特性:线性相位特性、紧支撑集特性、消逝矩特性、低熵性、多分辨分析、“去相关性”。因此在信号处理中大量使用小波变换作为滤波方法。
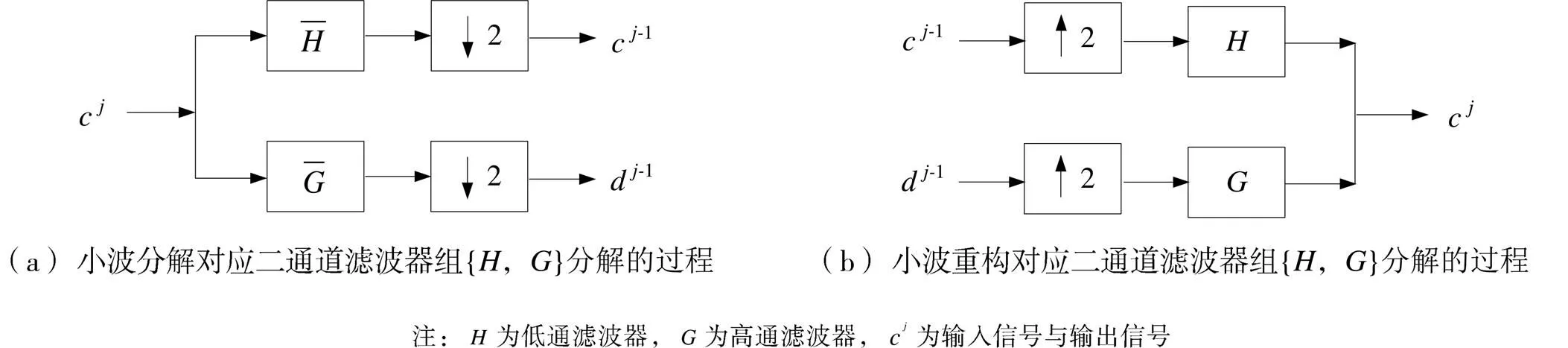
图7 小波分解和重构示意图
图7是理想过程,所以输出信号与原始信号相同。实际中并不相同,此处仅作说明用。
2.1 dbN小波滤波原理
db小波是世界著名的小波分析学者I. Daubechies构造的小波函数[22],简写为db,此处是小波的阶数。db小波的低通滤波器与高通滤波器表达式分别为[21]

我们有
这里,

将式(11)与式(8)和(9)联合,可求得低通滤波器为

高通滤波器可以通过式(2)求得,不再赘述。db5小波函数和尺度函数图形如图8所示。
2.2 不同小波函数比对
小波发展至今对于小波基的选择依旧没有通用的方法,研究工作者通常通过多次试验选择小波基。本文选取了db小波、sym小波、biorr.d小波等进行了分析比较。db小波、sym小波、biorr.d小波主要特性如表1所示。

表1 不同小波函数特性
本次实验对陀螺仪和加速度计信息进行不同小波变换,使用软阈值方式[23],分别计算方差和均值,得出以下试验结果,如表2和表3所示。
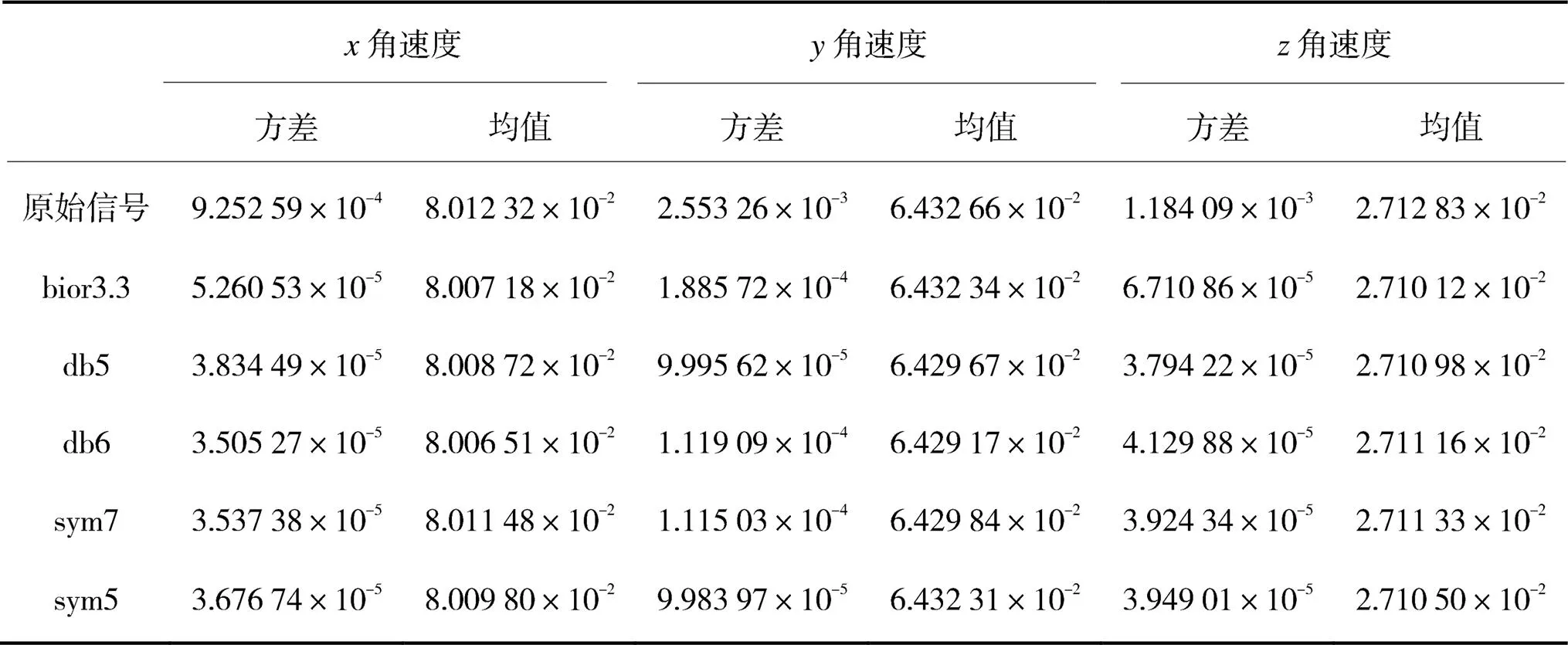
表2 不同小波函数去噪效果-陀螺仪信息
表3 不同小波函数去噪效果-加速度计信息
根据实验数据可以看出,6组数据的均值都变化不大,方差变化比较明显。根据实验观察可知,db5与db6小波对陀螺仪输出角速度以及加速度计输出加速度均有较好的表现。比较去噪后均值发现,db5与db6、sym7相比更接近原始信号,且db5小波构造也相对容易,资料更加丰富,因此本文选用db5来作为小波去噪函数。
3 实验验证及结果分析
使用2019年2月25日上午采集数据作为验证数据。本次实验依旧是将惯性器件置于水平桌面上进行数据实测。本次实验的实测原始数据如图9所示。经过db5小波5层分解处理后的结果如图10和11所示。可以看出,原始数据波动较大,毛刺较多,且存在一定野值。经过db5小波降噪后的信号光滑度明显增加,可以较好地剔除野值。

图9 陀螺仪与加速度计原始数据
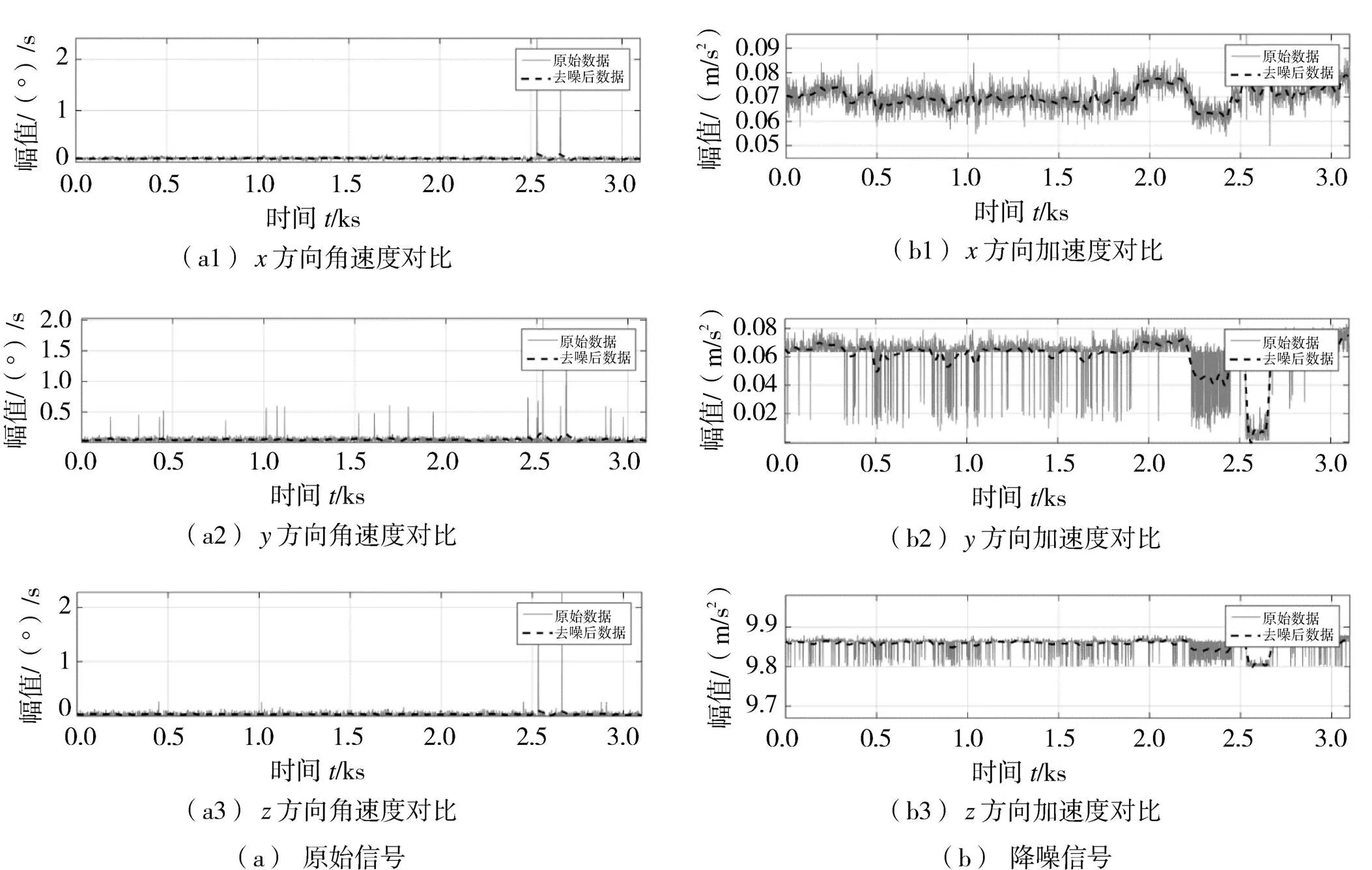
图10 原始信号与db5小波基5层分解降噪后信号结果
将原始信号与降噪后信号进行FFT变化后发现,db5可以非常好地消除中高频率的噪声,保留了零频附近的信号,不会对陀螺仪的数据敏感度造成影响。FFT结果及均值、方差如图11、表4所示。db5小波可以消除大部分的噪声,且不对频域均值造成影响,这符合小波变换保留原始信号有用信息的特性。方差几乎减小为原来的1/5。本次实验结果证明了第1节和第2节的分析和选择的正确性。
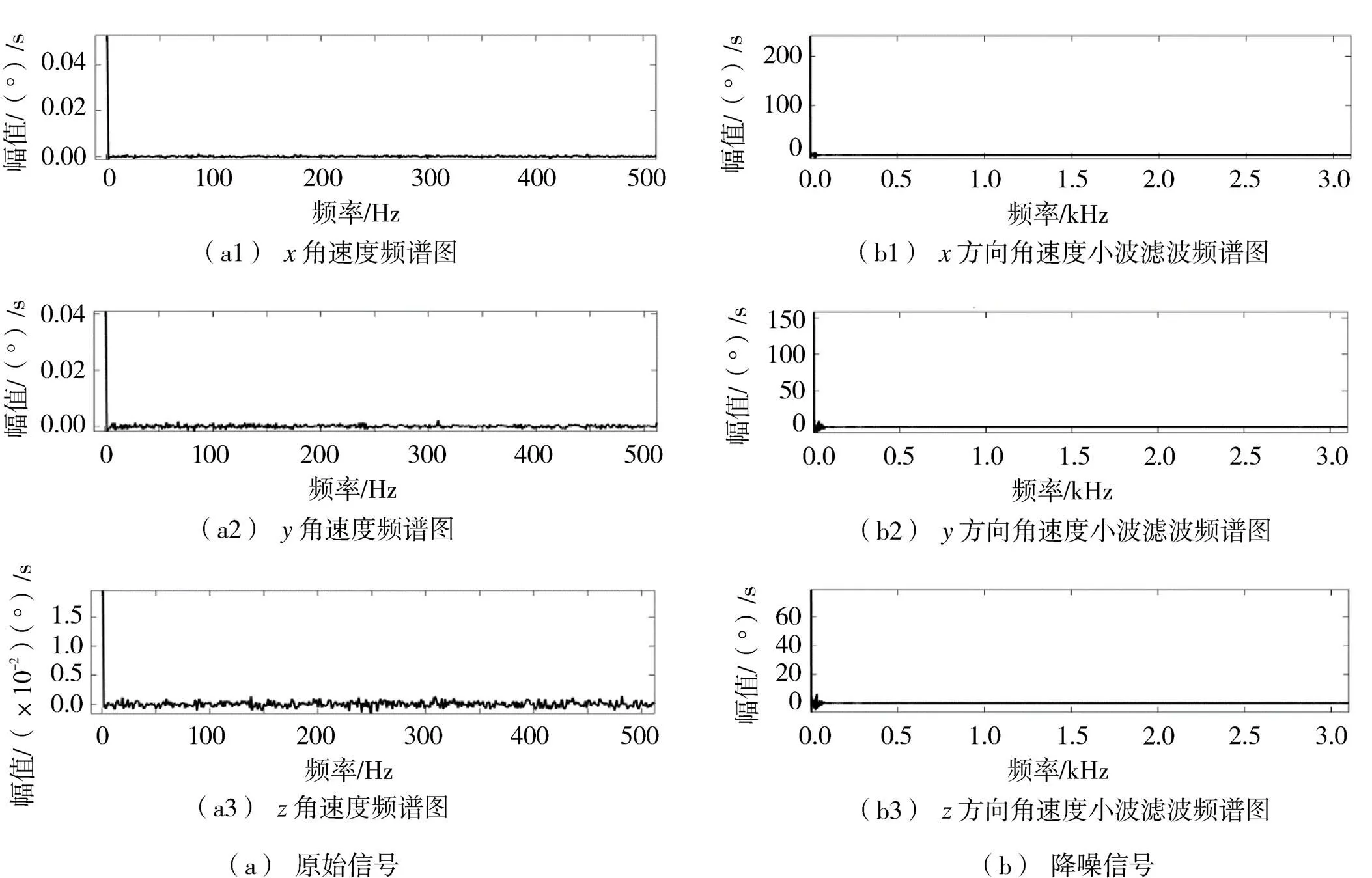
图11 陀螺仪原始信号与db5降噪后信号FFT结果

表4 db5小波去噪后数据对比
4 结语
为消除M8U惯性器件的误差,提高导航精度,本文通过连续的数据实测,对原始信号进行了频域、时域两个方面的研究。首先采用了FFT变换、功率谱密度法初步分析原始数据的频率特征,发现原始信息主要集中在零频附近,且伴随着少量噪声,但是噪声类型不能确定。后续进行时域分析。在时域分析时采用Allan方差分析法。通过求解对原始信息的Allan方差,获得了原始信息的噪声构成,及包含量化噪声、角度随机游走、速率随机游走和偏置误差。为了简化降噪复杂度,选择小波变换作为去噪手段。在选择小波类型时,进行多种小波变化对比试验。根据实验数据的表现选择db5小波作为滤波实施方法。本次实验获得了u-blox公司的导航产品UBLOX-EVK-M8U惯性器件的误差特性。通过对两次实验实测惯性传感器信息的举例说明,采用多种数字信号处理手段和小波变换滤波,得到了较为光滑和理想的惯性传感器信息结果,该结果在均值和方法上均有较好改善。为后续组合导航工作提供了一定程度的光滑度保证。
[1] TIAN Z S, ZHANG Y, ZHOU M, et al.Pedestrian dead reckoning for MARG navigation using a smart phone[J]. EURASIP Journal on Advances in Signal Processing, 2014(1): 65.
[2] LI Z P, FAN Q J, CHANG L M, et al.Improved wavelet threshold de-noising method for MEMS gyroscope[C] // 11th IEEE Inter-
national Conference on Control and Automation(ICCA), Taichung: IEEE, 2014: 530-534.
[3] 姜博文, 王可东. 低成本车载组合导航在GPS失效时的算法设计[J]. 传感技术学报, 2017, 30(3): 412-417.
[4] 谢钢.GPS原理与接收机设计[M]. 北京: 电子工业出版社, 2017.
[5] 韩厚增. 惯导辅助BDS/GPS高精度动态定位模型研究[D]. 徐州: 中国矿业大学, 2017.
[6] 杨洋.GPS/SINS深组合导航中的关键技术研究[D]. 南京: 南京理工大学, 2013.
[7] 许根源, 王直, 王志强. 基于自适应卡尔曼滤波的GPS/INS位置组合导航[J]. 电子设计工程, 2017, 25(21): 100-103+108.
[8] 刘建锋, 丁传红, 王医民. 基于Allan方差的激光陀螺信号分析[J]. 仪器仪表学报, 2007(S1): 108-110+136.
[9] 孙淑光, 王天游, 程鹏, 等.MEMS惯性传感器随机误差分析与去噪研究[J]. 计算机测量与控制, 2016, 24(3): 291-295.
[10] 韦官余, 徐伯建, 丁阳. 动态阿伦方差辅助的卡尔曼滤波算法在GPS/INS组合导航中的应用[C] //第二届中国卫星导航学术年会, 广州: 第二届中国卫星导航学术年会组委会, 2012.
[11] 胡昌华, 李国华, 刘涛, 等. 基于Matlab 7.X的系统分析与设计: 小波分析[M]. 西安: 西安电子科技大学出版社, 2004: 1-27.
[12] 李正周.Matlab数字信号处理与应用[M]. 北京: 清华大学出版社, 2008.
[13] 李海涛. 基于MEMS的SINS/GPS/磁力计组合导航算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2017.
[14] 童姣叶.MEMS加速度计的1/f噪声分析及滤波技术研究[D]. 成都: 电子科技大学, 2016.
[15] 李世银, 张楠, 武中文, 等. 基于小波分析的MEMS加速度计去噪优化算法[J]. 传感技术学报, 2018, 31(5):705-709.
[16] 漆贯荣. 时间科学基础[M]. 北京: 高等教育出版社, 2006.
[17] 中国公共安全.u-blox无连线3D惯性导航新变革[J]. 中国公共安全, 2016(5): 18.
[18] U-blox.u-blox 8/u-blox M8 receiver description[K]. 2017.
[19] 杜峰, 唐岚, 丁峻强.PSD和PWELCH函数的分析改进及应用[J]. 中国测试, 2010, 36(1): 93-96.
[20] EL-SHEIMY N, HOU H Y, NIU X J. Analysis and modeling of inertial sensors using Allan variance[J]. IEEE Transactions on Instrumentation and Measurement, 2007, 57(1):140-149.
[21] 彭思龙, 李保滨, 胡晰远. 小波与滤波器组设计: 理论及其应用[M]. 北京: 清华大学出版社, 2017.
[22] DAUBECHIES I.Ten Lectures on Wavelets[M]. Philadelphia: Society for Industrial and Application Mathematics, 1992.
[23] SONG G X, ZHAO R Z.Three Novel Models of Threshold Estimator for Wavelet Coefficients[M]. Berlin: Springer, 2001.
Implementation of u-blox INS information denoising based on db5 wavelet analysis
YU Lu1,2, MA Hong-jiao1, LUO Jin-tao1, HU Yong-hui1
(1. National Time Service Center, Chinese Academy of Sciences, Xi’an 710600, China;2. School of Electronic, Electrical and Communication Engineering, University of Chinese Academy of Sciences, Beijing 101400, China)
This study analyzed the UBLOX-EVK-M8U micro-mechanical inertial device in frequency and time domain by the FFT (fast Fourier transform), PSD (power spectral density) and Allan variance methods. And the main source of random noise was obtained, it mainly includes quantization noise, angular velocity random walk and zero offset instability. Based on the analysis of the noise characteristics, the wavelet transform is used for filtering. After introduced the basic principle of db5 wavelet, the denoising effect of different wavelet transforms is analyzed and compared, and the best match type was found. Finally, a processing method based on db5 wavelet is designed. This method can effectively remove the noise of acceleration and angular velocity, the simulation results shown that the db5 wavelet 5-layer decomposition has significant improvements in terms of variance and waveform similarity.
u-blox; Allan variance; wavelets; Inertial Navigation System (INS)
10.13875/j.issn.1674-0637.2020-01-0054-12
2019-05-16;
2019-06-18
地理信息工程国家重点实验室2017年度开放基金资助课题(SKLGIE2017-Z-1-1)
于露,女,硕士,主要从事组合导航研究。
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
北京航空航天大学学报(2021年9期)2021-11-02
科技风(2021年19期)2021-09-07
电子制作(2019年13期)2020-01-14
中国惯性技术学报(2019年1期)2019-05-21
百科探秘·航空航天(2017年9期)2017-12-31
制造技术与机床(2017年10期)2017-11-28
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
山东工业技术(2016年15期)2016-12-01
