
柔性变形机翼设计及其结构力学性能分析
2020-05-21 10:46张雄雄燕必希孙广开宋言明
机械设计与制造 2020年5期
张雄雄,燕必希,孙广开,宋言明
(1.北京信息科技大学仪器科学与光电工程学院,北京100192;2.光电信息与仪器北京市工程研究中心,北京100016)
1 引言
“机翼”是决定飞机性能的关键部件。传统飞机一般根据特定飞行任务和环境条件下的空气动力学特性设计机翼的总体布局和形状参数,并采用轻量化、高强度和固定式的材料结构制造,利用电传感技术感知各种载荷[1]。这种固定式刚性机翼可以通过襟翼、前缘缝翼等机构的简单刚性变形使飞机在特定飞行条件下改善其空气动力学性能。但是,固定机翼的局部刚性变形会使翼型截面几何廓形产生非连续变化和曲率突变,影响气动特性。更大的问题在于飞行环境参数是连续变化的,固定式机翼通常只能在一个设计点达到最优气动性能,大多数情况下性能不佳,在提升飞行性能和多任务适应性等方面存在瓶颈。
随着军事和民用发展需求以及科学技术的进步(尤其是无人机的应用发展),传统固定式机翼飞行器已经不能满足不断增加的飞行效率、多任务能力和灵活性需求,拥有高飞行效率和高性能飞行器,并且在飞行过程中能够适应多种飞行任务和不同环境条件的变形机翼技术受到日益广泛的关注和研究[2-3]。
目前,变形机翼(MorphingWing)已经成为未来先进航空飞行器的重要特征和发展方向。与固定式机翼不同,变形机翼的形状变形通常采用高度灵活的机翼系统,通过致动机构实现翼型的改变,实时调整其构造以获得飞机在特定飞行条件下改善的空气动力学性能。变形机翼可以根据不同的飞行任务和飞行环境条件改变机翼形状进而获得最优的飞行性能。拥有高飞行效率和高性能变形机翼飞行器能够在很大程度上减少能量消耗,有效增加续航能力[4];在多任务飞行过程中拥有优秀的环境适应能力并且在不同环境下达到最优飞行状态,相比传统的固定式机翼飞行器具有更强的生存能力。传统的固定式机翼飞行器只具有单一的飞行模式,为克服传统飞行器这种单任务模式的缺点,变形机翼飞行器提供了一种可行的解决方案。
变形飞机的概念最早可以追溯到1890年,法国Clément Ader提出了变体飞机的设计思想。他首次提出变体侦察机出于对速度的追求,机翼应设计成类似于蝙蝠或者鸟翅膀的形状,框架可折叠,面积可以缩小至1/2,甚至1/3。此后,国内外学者对变形机翼做了大量研究。1931年,HILL设计了一种变掠角飞机并进行了试飞。1955年,美国提出了XB-70Valkyrie轰炸机研究计划。该飞机采用刚性变体技术,两侧机翼翼端采用液压折叠可变设计,其下偏角可在25°到70°之间切换[5]。2001年,NASA提出了新型柔性变体飞机的概念,该飞机在飞行过程中可以随时改变机翼翼展、后掠角大小,其翼梢小翼可以自由地分叉与合并,如鸟类一样灵活。文献[6-7]设计了一种基于柔性机构变形(原理如图1)的可变弦向弯曲度机翼系统模型,并完成了风洞试验及模拟飞行测试。国内学者对变形机翼也进行过不少研究。文献[8]研究了类似于HECS机翼的基于杆索基结构的三维柔性变弯度机翼结构并采用遗传算法对机翼结构进行了拓扑优化研究。文献[9]对变弯度机翼准定常流动分离特性进行了实验研究,分析了机翼外围流场状态与机翼外形之间的关系。但是,现有变形机翼研究在面向实飞的小型变体无人机及柔性变形结构和功能上欠缺研究。
针对小型无人机实际飞行设计了柔性变形机翼。研究的重点是设计一种可以在两个指定标准翼型之间实现连续弯度调整的新颖的变形机翼系统。变形功能实现依靠沿着机翼跨度的一组柔性肋结构来实现,通过分布式的舵机—摇臂驱动系统实现弯度调节[10]。这种新颖的设计满足对致动精确性和控制可靠性的需要,响应时间短,有限的重量载荷以及足够的结构刚度和强度保证了无人机实际飞行的安全性。
2 柔性变形机翼设计
柔性变形机翼变形功能通过一组由分布式舵机—摇臂系统驱动的柔性肋机构实现。设计的变形机翼能够在两个指定状态之间实现连续的弯度调整。
2.1 柔性肋设计原理
NACA翼型是机翼设计中最常用的参考翼型之一,NACA0012是对称翼型,机翼结构的最大厚度和弦长比为12%,弯度为零。在实际飞行中NACA0012翼型具有较高的牵引力和较低的阻力系数,更适合以相对较低的升力系数高速巡航。机翼结构NACA6412的最大厚度与弦长比与NACA0012相同为12%,最大弯度为6%。NACA6412翼型具有较高的升阻比,在飞机实际飞行中所受阻力较小的同时可以有效地提高机翼的升力,更适用于低速滑行的飞行条件。标准NACA0012和NACA6412翼型结构,如图1所示。
提出了一种在NACA0012(非弧形)和NACA6412(弧形)之间实时调整翼型弯度的机翼设计,机翼可以连续精确的变形到目标构型,优化机翼实际飞行时的升阻比。如图1(c)所示。柔性变形机翼由两部分组成:由中心翼梁支撑的标准部分(靠近前缘)和由柔性肋结构组成的变形部分。机翼没有变形的时候,非变形部分和变形部分形成标准NACA0012翼型的配置。一旦变形,变形部分的形状变为与标准NACA6412翼型新配置。通过两种翼型的变化实现整个机翼翼型弯度的调整。应该注意的是,变形后的整个翼型不具有与标准NACA6412翼型相同的结构,只是变形部分形成NACA6412机翼构型,而非变形部分与NACA0012翼型保持一致。因此,设计的柔性变形机翼可以在两种翼型之间实现形状变形进行弯度调整,但是变形后的机翼翼型不能与NACA6412翼型的配置混淆。
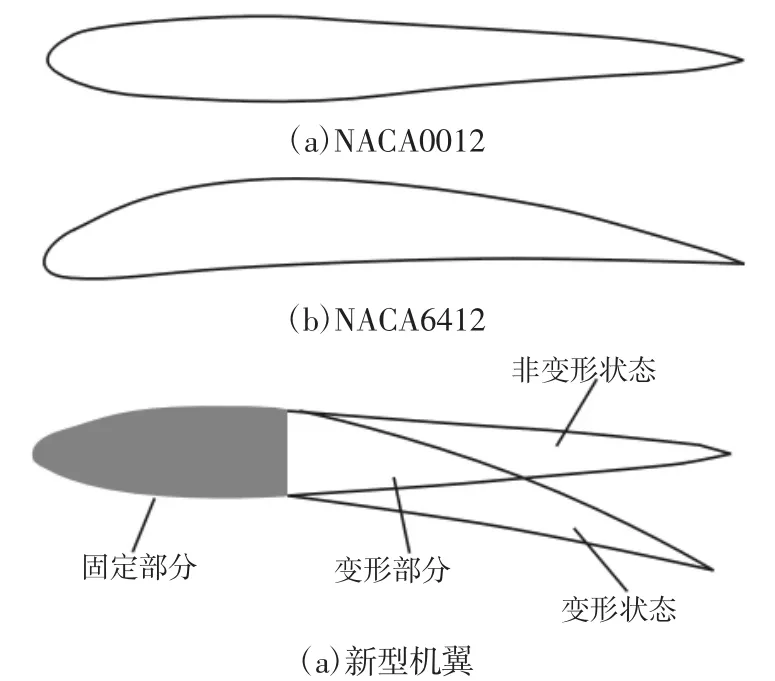
图1翼型结构示意图Fig.1 Schematic Diagram of Airfoil Structure
图1 (c)的非弧形和弧形配置作为机翼变形的两个翼型状态。机翼变形是通过一组可变翼片设计的柔性肋结构实现的柔性肋是符合两个参考状态的几何构型的多单元机构。
每个部件都有相同的滑动轨和转动接头作为连接构件。因为柔性肋的设计是图1(c)所示的两个参考状态的配置。所以每个子组件具有唯一的几何特征,柔性肋设计的基本单元与整体结构,如图2、图3所示。子组件可以分为前子组件,端子组件和通用子组件。除了末端子组件,每个子组件通过连接两个相同的外部构件和一个嵌入的内部构件形成。每对外部构件牢固地结合到相应的内部构件以形成基本单元的完整组件。
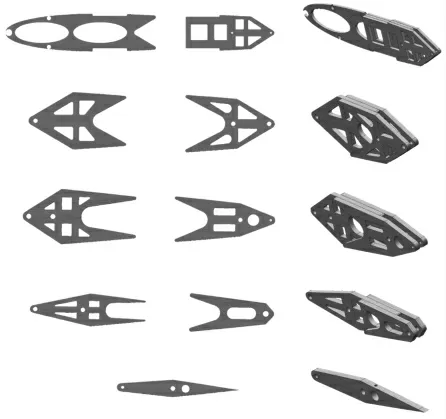
图2 柔性肋基本单元Fig.2 The Basic Unit of the Flexible Rib
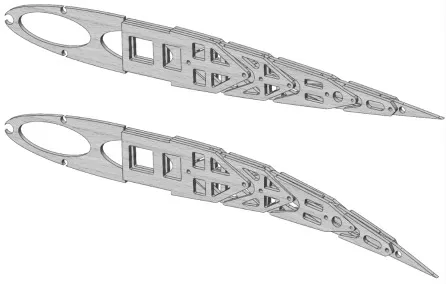
图3 柔性肋整体结构Fig.3 The Whole Structure of the Flexible Rib
2.2 变形机翼设计
变形机翼整体结构及其局部细节,如图4所示。变形区内的柔性肋系统包含七组柔性肋结构,间隔120mm。每组柔性肋结构的前基本单元子组件牢固地连接到主翼梁。机翼由三组舵机驱动的分布式摇臂系统为变形提供动力,舵机位置位于变形区,实际固定在机翼翼梁上。碳纤维杆作为传动连接,通过每组柔性肋的末端基本部件和每组摇臂系统的末端。整个变形机翼设计为薄木结构,以承受气动载荷。由于各基本单元结构的连接和柔性肋结构的变形作用,在变形面上会形成小间隙。
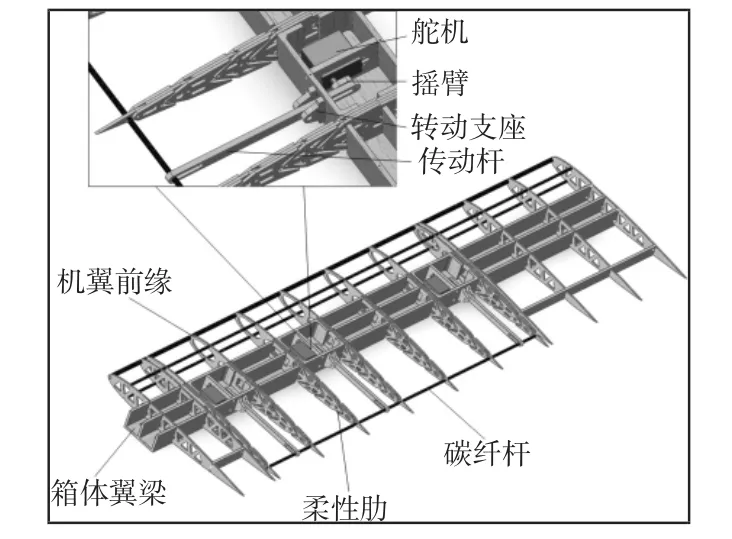
图4 变形机翼整体结构及局部细节Fig.4 Deformed Wing Structure and Local Details
3 变形机翼气动特性分析
为了检验变形机翼设计的空气动力学特性并获得作用在机翼表面上的气动载荷,用标准CFD软件Fluent对翼型的空气动力学进行了数值分析。选择翼型在弯度最大弧形结构下进行分析,因为此时处于空气载荷最大的状态。空气被处理为具有恒定密度为1.225kg/m3的不可压缩粘性流,平均流速假定为20m/s,在15℃的温度和101,325Pa的大气压下将粘度系数设定为1.48×10-5m2/s。雷诺数约为49W,CFD模拟采用基于压力的粘性Spalart-Allmaras模型的绝对速度公式,计算过程中忽略热传递。
雷诺系数公式:
将翼型放入一个最小控制尺寸为弦长(360mm)36倍的控制区域内,网格选择四边形单元,使边界层控制区域内网格最大宽度约为2.60mm,翼型周围的等压力值线,如图5所示。选择AOA在(-4~16)°范围内进行空气动力学分析。为了比较最大变形和未变形机翼的气动特性,在图6中给出了NACA0012翼型(未变形机翼)和最大弯度变形时的翼型升力(CL)和阻力(CD)系数之间的相关性,随AOA变化的升阻比函数,如图7所示。两组风洞试验数据分别为雷诺数(Re)为20W和100W的NACA0012翼型的风洞测试结果,如图6、图7所示。仿真分析获得的NACA0012翼型和变形机翼型在雷诺数为49W条件下的数值结果,NACA0012翼型的数值结果与参考实验数据吻合良好。数值结果和参考实验数据在所考虑的整个AOA的范围内都具有相似的趋势。在图6中观察到,当CL=0.4时,未变形和变形的翼型的CL-CD曲线相交。在交叉点下方,未变形的机翼具有更高的升力与牵引比,而变形机翼在交点上方具有较高的升阻比。当UAV以相对较低的升力系数(CL<0.4)高速巡航时,由于产生的较低的牵引力,未变形机翼更有效地起作用。另一方面,当UAV以相对较高的升力系数(CL>0.4)在低速下滑行时,变形到最大弯度的机翼构型产生较低的阻力而使得UAV更有效地飞行。变形机翼在低速和高速飞行模式之间不断变化时,可以有效改善无人机的空气动力学性能。在相同的AOA中,CFD结果,如图7所示。进一步证明,变形的翼型与未变形的翼型相比具有更好的升阻比。
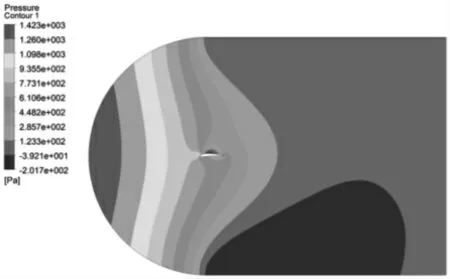
图5 压力等值线Fig.5 Pressure Contour
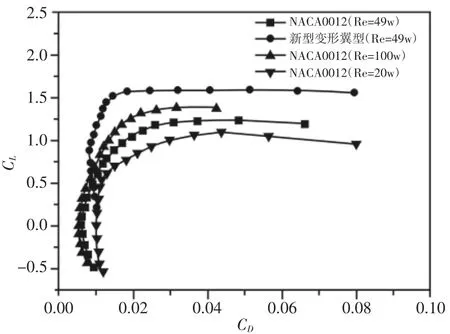
图6 未变形和变形的翼型的CL-CD曲线Fig.6 The Undeformed and Deformed Wing Type CL-CD Curve

图7 未变形和变形翼型的升阻比随AOA变化曲线Fig.7 The Undeformed and Deformed Wing Type of Lift Drag Ratio with AOA Change Curve
4 结构完整性
采用有限元分析方法进行结构完整性分析。将柔性肋组件的3D模型导入到有限元静力学分析模块中,使用二次六面体单元和二次楔形单元共同离散化柔性肋组件的3D模型。利用二次四边形接触单元和二次三角形接触单元对接触区域进行建模。柔性肋选用桦木胶合板材料作为基本单元组件的材料。
前基本单元组件的左表面作为柔性肋与翼梁连接的固定端,变形机翼系统中的碳纤连接杆将约束末端基本单元组件在驱动点的运动,所以驱动点在驱动力方向得到碳纤杆的固定支撑。采用粘合接触条件来考虑每个基本单元组件中的层状薄木单元之间的粘附。对连接的子组件与子组件之间的接触表面以及子组件和销的接触表面施加无摩擦接触条件。
基于3.1CFD仿真结果,得到二维变形机翼型在最大弯度时的气动载荷,最大载荷为1423Pa,最小载荷为-201.7Pa,平均载荷为767Pa。然后通过机翼变形区的跨度来计算柔性肋总的受力。在结构完整性分析中在每个翼上考虑了114.05N的设计升力。因此,从CFD模拟获得的空气动力学载荷被放大到设计升力114.05N。每个柔性肋结构有效地承担作用在120mm跨度(两个柔性肋之间的空间)的气动载荷。
在柔性肋结构的Von-Mises等效应力分布,如图8所示。整个柔性肋受到Von-Mises等效应力的最大值为5.3MPa,集中在胶合板与销轴接触面,小于胶合板屈服强度11.65MPa。结果表明,气动载荷产生的最大有效应力小于柔性肋屈服强度,柔性肋结构设计可以保证设计载荷的安全。
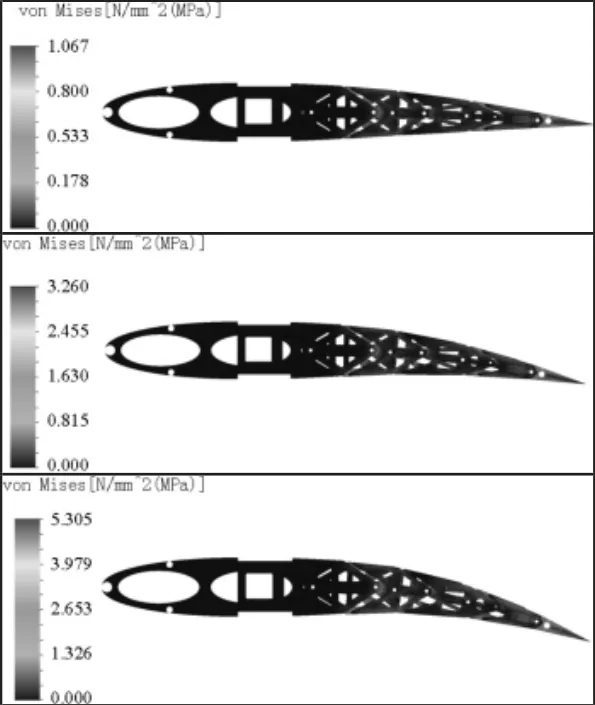
图8 柔性肋等效应力分布Fig.8 The Equivalent Stress Distribution of the Flexible Rib
机翼的整个结构由木材构成,包括桦木层压板,轻木和桐木。基于结构应力分析结果。伺服电机必须提供的致动变形机翼的力约为5.43N,同时考虑到可靠性和重量负载,每个舵机的最小输出转矩为0.27N·m,选择Hitec HS-5685标准金属齿轮微型舵机以满足这一要求。
5 结论
(1)柔性变形机翼设计针对面向实际飞行的小型无人机。变形功能实现依靠沿着机翼跨度的一组柔性肋结构,可以在两个指定标准翼型之间实现连续弯度调整。这种新颖的设计满足对致动精确性和控制可靠性的需要,响应时间短,有限的重量载荷以及足够的结构刚度和强度保证了无人机实际飞行的安全性。
(2)气动分析的结果表明:柔性变形机翼在未变形时具有较高的牵引力和较低的阻力系数;更适合以相对较低的升力系数高速巡航。变形时的翼型具有较高的升阻比,在飞机实际飞行中减小阻力的同时可以有效地提高机翼的升力,连续的变形能力可以有效改善柔性变形机翼的空气动力学性能。
(3)力学分析的结果表明:在无人机实际飞行过程中气动载荷产生的有效应力5.3MPa小于柔性肋的屈服强度11.65MPa,柔性肋组件的设计可以安全地承受负载,验证了柔性变形机翼的结构完整性,可满足小型无人机的实际飞行要求。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2021年6期)2021-07-20
西安航空学院学报(2020年5期)2020-12-08
北京航空航天大学学报(2020年10期)2020-11-14
液压与气动(2020年2期)2020-02-18
北京航空航天大学学报(2017年8期)2017-12-20
航空学报(2015年4期)2015-05-07
凿岩机械气动工具(2014年3期)2014-03-01
振动、测试与诊断(2014年5期)2014-03-01
