环轨起重机整机回转系统分析研究
2020-05-19 02:06
建筑机械化 2020年3期
(徐工集团工程机械股份有限公司建设机械分公司,江苏 徐州 221004)
环轨起重机是一种上车系统运行在环形轨道上,可实现起升、变幅和回转的超大型起重设备,在国内尚属空白。其回转系统及回转阻力计算方法在文献中极少出现,这给环轨起重机设计造成困难。
环轨起重机可采用2 种回转方式:①滑靴回转方式;②轨道轨轮回转方式。两种回转方式回转阻力计算方法有所差异,本文主要研究轨道轨轮回转方式回转阻力计算方法。通过对环轨起重机回转系统分析,提出环轨起重机回转阻力计算方案,为环轨起重机设计提供依据。
1 环轨起重机简介
环轨起重机是由路基箱、轨道、平衡台车、回转平台和上车臂架系统等组成,环轨起重机整机回转时,平衡台车绕回转中心在圆形轨道上滚动,带动整机回转。环轨起重机回转系统由轨道、平衡台车、回转平台和液压系统组成。平衡台车由前平衡台车和后平衡台车组成。整机示意图如图1 所示。
2 回转阻力

图1 环轨起重机整机示意图
环轨起重机整机回转时,前平衡台车与后平衡台车同时绕环形轨道中心回转。整机无论空载状态还是吊重状态,前后平衡台车承受载荷均不一样,其所需驱动力也不一样,需要两套液压系统分别驱动前平衡台车和后平衡台车,通过控制系统实现前平衡台车与后平衡台车同步回转。环轨起重机回转阻力分析可等效为前平衡台车和后平衡台车回转阻力分析,本文以前平衡台车回转阻力为研究对象。
2.1 模型简化
环轨起重机前平衡台车和后平衡台车回转采用轨行式运行机构。前平衡台车主要由多级平衡梁和台车组成。多级平衡梁用于承受起重机的自重和外载荷,并均分至驱动台车和从动台车上。台车主要由车架、车轮和行走减速机组成。驱动台车用于驱动相连的平衡台车并带动整个环轨起重机回转。
环轨起重机整机回转简化为前平衡台车绕环轨中心推动回转平台和臂架系统运动,后平衡台车绕轨道中心推动回转平台和剩余配重运动。如图2 和图3 所示。

图2 前平衡台车推动部件
图3 后平衡台车推动部件
2.2 前平衡台车受力分析
环轨起重机在吊重时,前平衡台车承受吊重物、臂架系统和部分配重的重量。整机回转时,相当于前平衡台车负载吊重物、臂架系统和部分配重的总重量绕环形轨道中心回转。前平衡台车的回转阻力由滚动阻力、坡道阻力、曲线行驶阻力、水平导向轮附加阻力、风阻力和启制动惯性力。下述分析以前平衡台车为研究对象。
环轨起重机前平衡台车回转总阻力F为

式中F——前平衡台车回转总阻力;
Fm——前平衡台车滚动阻力;
Fp——前平衡台车坡道阻力;
Fq——前平衡台车曲线行驶阻力;
Fs——前平衡台车水平导向轮附加阻力;
Fwd——臂架系统风载荷折算至前平衡台车的阻力;
Fqg——臂架系统启制动惯性载荷折算至前平衡台车的阻力。
2.2.1 滚动阻力
平衡台车采用轨轮在轨道上滚动的方式实现整机回转。滚动阻力Fm如下

式中p——前平衡台车正压力,p=G+Gb+Gm+GL+Gp;
f——滚动摩擦系数;
μ——车轮轴承摩擦系数;
d——车轮轴径;
D——车轮踏面直径;
β——附加摩擦阻力系数;
G——吊重物重量;
Gb——臂架重量;
Gm——桅杆重量;
GL——拉板系统重量;
Gp——使用配重量。
2.2.2 坡道阻力
由于环轨起重机所在地面会存在一定坡度,在整机回转时,前平衡台车需要克服由于地面坡度所产生的阻力。坡道阻力Fp

式中a——坡度角;
g——平衡台车偏角(图4)。

图4 g角示意图
2.2.3 曲线行驶阻力Fq

式中——曲线行驶阻力系数。
2.2.4 水平导向轮附加阻力Fs
驱动台车和从动台车竖向采用4 个车轮,横向采用2 个导向轮(图5)。台车竖向轮轴线平行而非向心,即竖向轮瞬时运动方向的法向与圆形轨道径向方向存在夹角β(图6)。由于竖向轮瞬时运动方向的法向与圆形轨道径向方向不一致,台车在运动过程中,台车竖向车轮与轨道在径向方向会存在相对滑动。因竖向车轮与轨道间相对滑动产生的在轨道径向方向的摩擦力是水平导向轮的正压力。(注:竖向车轮与轨道在法向方向存在滚动滑动,为简化计算,此处简化为竖向车轮与轨道间的静摩擦滑动。)

式中μ1——钢铁之间静摩擦系数;
μ1——轮子的滚动阻力系数。
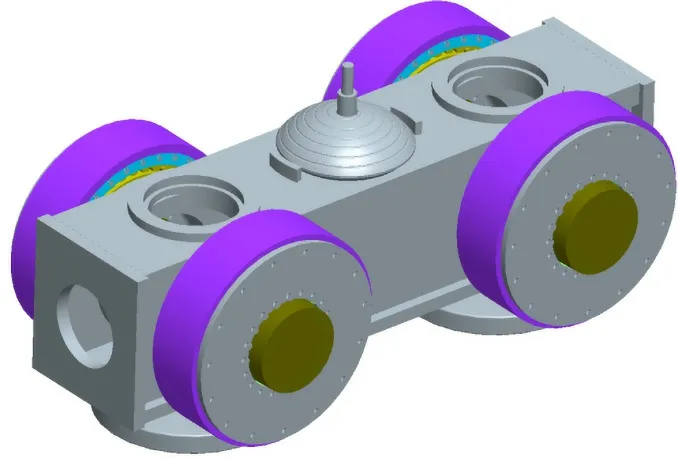
图5 台车结构

图6 β角示意图
2.2.5 风阻力Fwb
环轨起重机回转过程中,需要承受整机风载荷。前平衡台车主要承受主臂、副臂和重物风载。因主臂、副臂和重物风载作用点位置不同,采用力矩平衡原理将臂架系统和重物所受风载荷折算至前平衡台车位置(图7)。折算方法如下:

式中Fw1——主臂风载;
Fw2——副臂风载;
Fwg——重物风载;
L1——主臂风载作用点离环形轨道回转中心的水平距离;
L2——副臂风载作用点离环形轨道回转中心的水平距离;
L3——重物风载作用点离环形轨道回转中心的水平距离;
R——环形轨道回转半径。

图7 前平衡台车风载折算图
2.2.6 启制动惯性力Fqg
折算至前平衡台车启制动惯性力

其中,启制动角加速度

式中h——启制动角加速度;
Th——回转一周时间;
ta——启制动加速时间;
mzb——主臂重量;
mfb——副臂重量;
Q——重物重量;
L4——主臂质心离环形轨道回转中心的水平距离(图8);
L5——副臂质心离环形轨道回转中心的水平距离;
L6——重物质心离环形轨道回转中心的水平距离。

图8 臂架系统质心力臂图
2.3 驱动装置计算
由上确定前平衡台车回转阻力之后,如何布置合适数量和合适力矩的驱动轮,以驱动整车回转,成为环轨起重机回转系统设计的关键点。
在特定工况下,因前台车采用平衡梁结构,单个驱动轮上正压力相同,其所提供的最大驱动力矩是定数,需要布置多个驱动轮共同驱动。
驱动轮个数

式中nq——确定驱动轮个数;
n——最少驱动轮个数;
N——前台车轮子总数量。
单个轮子驱动力矩

式中M——单个轮子驱动力矩;
Mq——单个轮子最小驱动力矩;
Cq——驱动放大系数;
Rr——轮子半径。
3 结语
本文以环轨起重机前台车为研究对象,通过对回转系统分析,明确了环轨起重机回转阻力考虑因素及计算方法,同时确定了驱动轮的布置数量和单个驱动轮的驱动力矩,对环轨起重机回转系统设计具有指导意义。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
中国新技术新产品(2020年4期)2020-05-05
中国工程机械学报(2019年6期)2019-12-31
发明与创新·中学生(2018年10期)2018-10-15
质量技术监督研究(2018年1期)2018-03-26
家庭百事通·健康一点通(2017年9期)2017-09-22
创新作文(1-2年级)(2017年1期)2017-04-19
制造业自动化(2017年2期)2017-03-20
科技创新导报(2016年27期)2017-03-14