一种基于空空链路的双目标中继信息流设计方法
2020-05-15 00:01盛瑞卿朱舜杰邢卓异白崇延赵洋
航天器工程 2020年2期
盛瑞卿 朱舜杰 邢卓异 白崇延 赵洋
(北京空间飞行器总体设计部,北京 100094)
我国探月工程的第三阶段将实施月面软着陆和样品采集,并将月壤样品带回地球。为实现这一目标,需要通过月球轨道交会完成样品转移,实现首次无人月球轨道交会对接[1]。与地球轨道交会对接相比,由于其特殊的深空环境和测控难度,无人月球轨道交会对接技术在控制的自主性、快速性以及系统的鲁棒性上都有较高的要求。
为实现自主交会对接,需在实施交会对接任务的目标航天器和追踪航天器上配置交会敏感器,完成两个航天器的相对位置、速度测量以及相对角度和角速度的测量[2]。根据目前国内外的工程实施情况,交会敏感器一般有微波雷达、激光雷达、GPS测量、光学瞄准镜等。其中,微波雷达除具备相对位置、角度、速度测量功能以外,还具备通信功能[3-4]。
目前,我国在载人航天领域已实现了地球轨道的交会对接技术,该领域利用空空链路实现了将固定的某些目标飞行器的遥测数据通过载人飞船下行地面站的信息流设计方案[5]。由于地球轨道交会对接具备GPS和中继星等手段,可以确保近似全弧段的地面上下行测控链路支持,所以利用空空链路的方案设计在时仅考虑了少数关键下行遥测的单向传输能力,未涉及上行遥控支持能力,也不支持双向全遥测数据的传输能力。而月球轨道交会对接存在天然的月球遮挡,造成每圈至少有40 min的不可见弧段;同时地面测控资源受限,每个航天器仅有一个深空地面站支持。因此,当某个航天器或某个地面站出现通信链路故障的情况下,迫切需要两器依然具备一定的遥控和遥测能力,提高任务的可靠性。
本文探讨了载人航天地球轨道交会对接任务空空通信任务的实现方案,实现了一种用于月球轨道交会对接,支持上下行通路双向自由传输的空空通信方案。
1 空间链路架构设计
微波雷达作为一种交会对接用测量敏感器,除具有捕获、跟踪和测量功能外,还具有空空通信功能,可以从目标航天器(Target Vehicle,简称TV)与追踪器(Chase Vehicle,简称CV)相距约100 km时建立通信链路,实现两飞行器之间的双向通信。
以空空链路建立的两飞行器通信链路为基础,搭建了地面站、目标飞行器、追踪器之间的双目标中继通信链路,具体双目标中继链路架构规划的示意图详见图1。
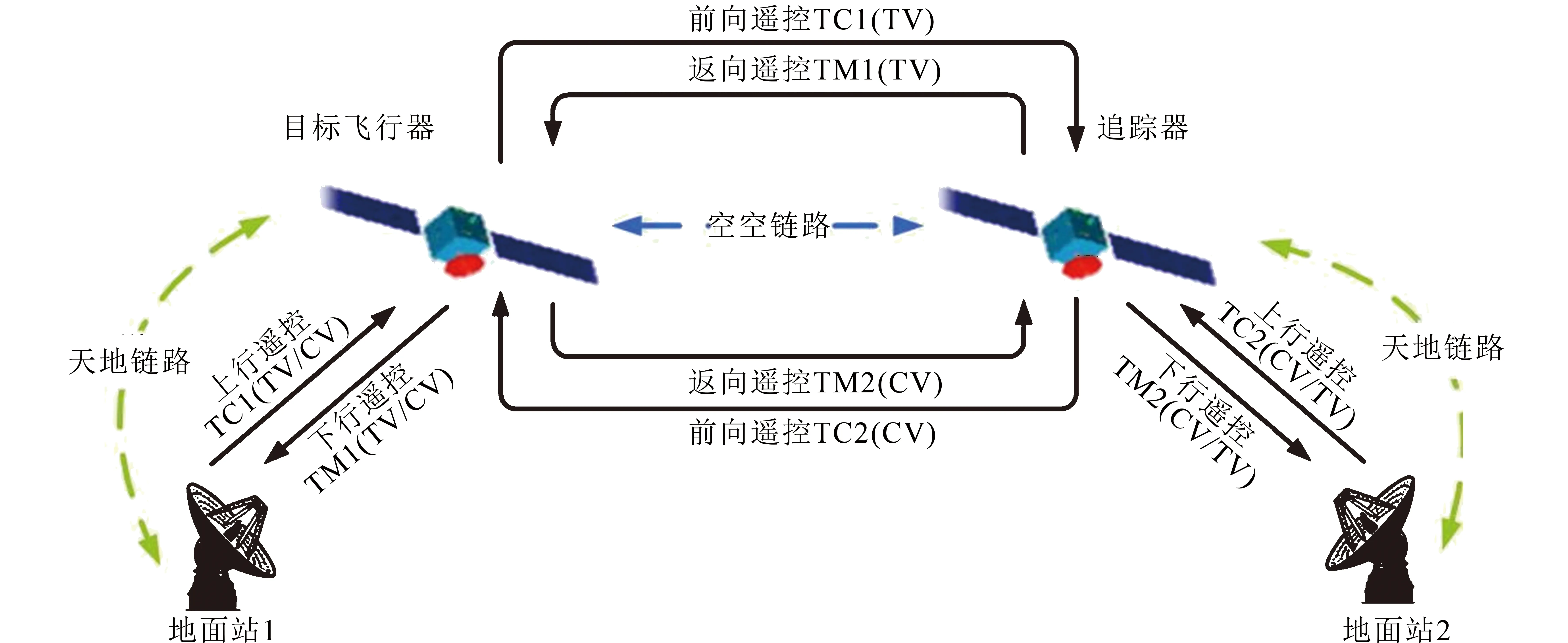
图1 空空双中继链路规划Fig.1 Bi-objective relay planning based on space to space communication
其中,地面站对目标飞行器、追踪器发送遥控信号定义为上行链路,目标飞行器、追踪器向地面站发送遥测信号定义为下行链路;任一飞行器(目标飞行器或追踪器)向另一飞行器发送遥控信号定义为前向链路,任一飞行器(目标飞行器或追踪器)向另一飞行器发送遥测信号定义为返向链路。
地面站1向目标飞行器发送上行遥控信号TC1(TV/CV),目标飞行器接收到该信号后,解析该信号属于自身飞行器或追踪器,若为自身飞行器遥控信号TC1(TV),则直接译码后转发至相应设备执行,若为追踪器遥控信号TC1(CV),则通过前向遥控链路转发至追踪器;目标飞行器收集自身的下行遥测信息TM1(TV)的同时,通过返向遥测链路接收追踪器的遥测信息TM1(CV),目标飞行器将两部分遥测信息按照相关协议进行组织,经调制后形成下行遥测信号TM1(TV/CV)下传至地面站1。在此通信过程中,可认为目标飞行器作为中继,实现了地面站与追踪器之间的通信。
同理,地面站2向追踪器发送上行遥控信号TC2(CV/TV),追踪器可解析出目标飞行器遥控信号TC2(TV),通过前向链路转发至目标飞行器;同时,追踪器可收集目标飞行器的遥测信息TM2(TV),与自身遥测信息一起经调制形成下行遥测信号TM2(CV/TV)下传至地面站2。在此通信过程中,可认为追踪器作为中继,实现了地面站与目标飞行器之间的通信。
2 空间链路协议设计
2.1 遥控空间链路协议设计
遥控空间链路主要用于上行链路和前向链路。考虑到本文中的上行遥控涉及多个地面站信源及多个航天器用户端,因此遥控方式选用CCSDS分包遥控体制[6-7]。分包遥控方案中,数据注入的数据结构、格式采用分层结构,各层的数据结构及其关系如图2所示。
分包遥控中采用的数据结构包括遥控包、遥控传送帧,其长度可根据上注需求由用户自主定义。遥控传送帧被分为长度固定的短码块进行差错编码,装入遥控信道传输单元(CLTU)中,在其前后加上起始序列和结尾序列以标志一个CLTU的开始和结束。这些CLTU通过无线调制后进入物理信道,向接收端发送。在连续传送多个CLTU之间可以用空闲序列连接,空闲序列适当CLTU不存在时,用来维持比特同步的,其码字是“0”和“1”交替的序列,长度不限。
因此,一个CLTU可包含若干个遥控传送帧,一个遥控传送帧可包含若干个遥测包,一个遥控包可包含若干个遥控应用数据。为确保路由业务的一致性,这里进行统一约束,对于一个CLTU,其内部的遥控传送帧可定义为不同航天器;对于一个遥控传送帧,其内部的遥控包则要求对应同一航天器。
因此,对于地面上注的一条发往某航天器的指令,分包遥控对应的路由业务处理流程如下:首先,在遥控传送帧数据格式中的帧主导头中,通过航天器标识定义,以确定当前该遥控传送帧应发往的航天器;其次,在遥控包数据格式中的包主导头中,通过包标识定义,以确定该遥控包所分发的对应设备。即通过遥控传送帧的主导头和遥控包的主导头唯一确定了一条指令的最终输出端口。

图2 分包遥控数据格式Fig.2 Format of the telecommand data
2.2 遥测空间链路协议设计
遥测空间链路主要用于下行链路和返向链路。分包遥测体制[6,8]作为面向传输的一种动态调度机制,能够根据用户需要灵活调动不同的源包,并通过虚拟信道调度,实现多数据流使用同一物理信道进行数据传输,更适用于本文所给出的以空空链路为基础构建的双中继通信链路。分包遥测体制中其数据格式如图3所示。
各设备根据需要动态生成自身的遥测源包(E-PDU)并发送至数管计算机,数管计算机接收到多路E-PDU后,根据源包调度策略生成多路协议数据单元(M-PDU),之后将其构造成适合虚拟信道传输的虚拟信道数据单元(VCDU),交给物理层进行传输。在物理信道的传输中,每一个VCDU被封装在一个信道访问数据单元(CADU)中,CADU提供长度固定的信道访问时隙,由同步标识符划分每个时隙的界限。
与分包遥控体制不同的是,分包遥测体制中VCDU可根据业务等级不同选择是否进行差错控制编码,构成编码虚拟信道数据单元(CVCDU);用户自定义数据长度仅限最大长度相比,分包遥测中每个VCDU/CVCDU中的数据域长度是固定的。
分包遥测具备虚拟信道调度和源包调度两级调度机制,通过这两种调度机制,以满足地面根据不同的应用过程将各个源包分发到不同的数据宿。
要实现源包调度,需要在E-PDU数据格式中,通过包主导头中定义应用过程标识符,以区分该遥测源包对应设备端的第几路源包;要实现虚拟信道调度,则需要在VCDU数据格式中,通过VCDU主导头中定义VC-ID号,以区分当前使用的VC信道。
因此,当一个CADU形成以后,也就唯一确定了当前数据域各源包的下传调度周期。

图3 分包遥测数据格式Fig.3 Format of packet telemetry data
2.3 双目标空间链路通信协议
对于具备中继功能的航天器,除实现常规对地通信外,还需具备数据转发功能。因此,要求航天器上执行数据管理功能的数管计算机至少包括3个功能模块:对地数据通信模块、数据转发模块以及数据分发/采集模块。其中,对地数据通信模块主要实现与地面站遥控数据接收及遥测数据发送的功能;数据转发模块主要实现将本机的遥控数据和遥测数据发往另一航天器的功能;数据分发/采集模块主要实现将处理后的遥控数据发往执行端设备以及采集各执行端设备组织形成遥测数据的功能。对应于本文所选用的上行分包遥控体制和下行分包遥测体制,遥控数据信息和遥测数据信息在整个通信链路中的传递路径如图4、图5所示。
地面站与器上航天器统一采用上行遥控通信链路传输单元(CLTU)、下行遥测信道访问数据单元(CADU)进行数据交互;两个航天器之间遥控信息通过遥控传送帧、遥测信息通过虚拟信道数据单元(VCDU)进行数据交互;单一航天器内部数管计算机与各执行机构遥控信息通过遥控包、遥测信息通过遥测源包(E-PDU)进行信息交互。

图4 以目标飞行器为中继信息交互图Fig.4 Information interaction using TV relay
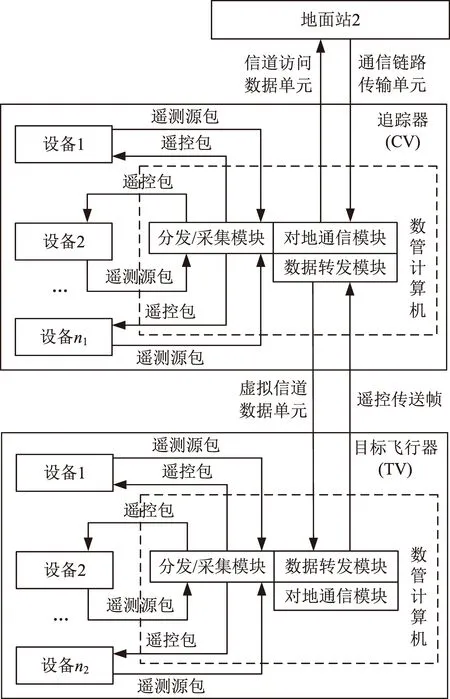
图5 以追踪器为中继信息交互图Fig.5 Information interaction using CV relay
3 工程实践
3.1 双目标中继信息流设计实例
本节以某无人月球轨道交会对接深空探测器为例,给出了基于空空链路的目标飞行器与追踪器上、下行信息流设计结果。目标飞行器、追踪器均配置有数管计算机(System Management Unit, SMU)和控制计算机GNCC(Guidance Navigation Control Controller, GNCC),用于数据管理与制导、导航控制。除以之外,目标飞行器作为主动飞行器,配置空空敏感器微波雷达;追踪器作为被动飞行器,配置空空敏感器微波雷达应答机。SMU作为BC端与GNCC采用1553B总线进行互联;GNCC作为主叫方与微波雷达、微波雷达应答机采用RS422总线进行互联;微波雷达与微波雷达应答机之间则采用空空链路实现通信。
3.1.1 上行遥控信息流
地面站上行的遥控信号通过测控设备转发至目标飞行器侧数管计算机SMU_TV,SMU_TV经射频解码后,解析出各个遥控传送帧,并判断该遥控传送帧归属地为目标飞行器(TV)或追踪器(CV),其中继上行遥控信息流如图6、7所示。
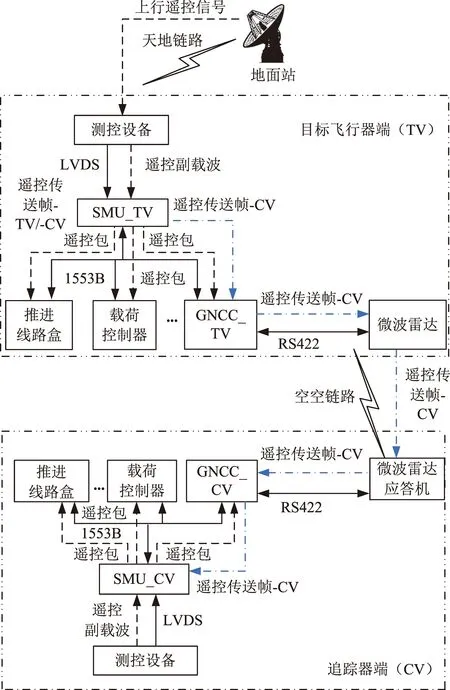
图6 以目标飞行器为中继上行遥控信息流Fig.6 Information flow of telecommand using TV relay
若为当前航天器的遥控传送帧,则数管计算机解析出该遥控传送帧的各个遥控包,通过1553B总线发送至各个RT设备端执行。
若为另一航天器的遥控传送帧,则处理流程如下,这里以目标飞行器(TV)接收到追踪器(CV)的遥控数据为例进行说明。
(1)目标飞行器侧数管计算机SMU_TV将该遥控传送帧发送至RT设备端的控制计算机GNCC_TV特定接收缓冲区,等待其取走。
(2)GNCC_TV周期性轮询该接收缓冲区,当查询到数据后,将该数据转发至微波雷达主机。
(3)微波雷达主机通过空空链路将数据发送至微波雷达应答机。
(4)追踪器侧控制计算机GNCC_CV周期性轮询微波雷达应答机接收数据缓冲区,当查询到数据后,将该数据放置总线发送缓冲区,并向追踪器端SMU提出服务请求。
(5)追踪器侧数管计算机SMU_CV周期性查询各RT终端服务请求,当接收到GNCC_CV提出的该服务请求后,立即从其发送缓冲区接受该遥控指令帧,并清除其服务请求位。
(6)SMU_CV接收到该遥控指令帧后,则对其进行解析得到各个遥控包,通过1553B总线发送至各个RT设备端执行。
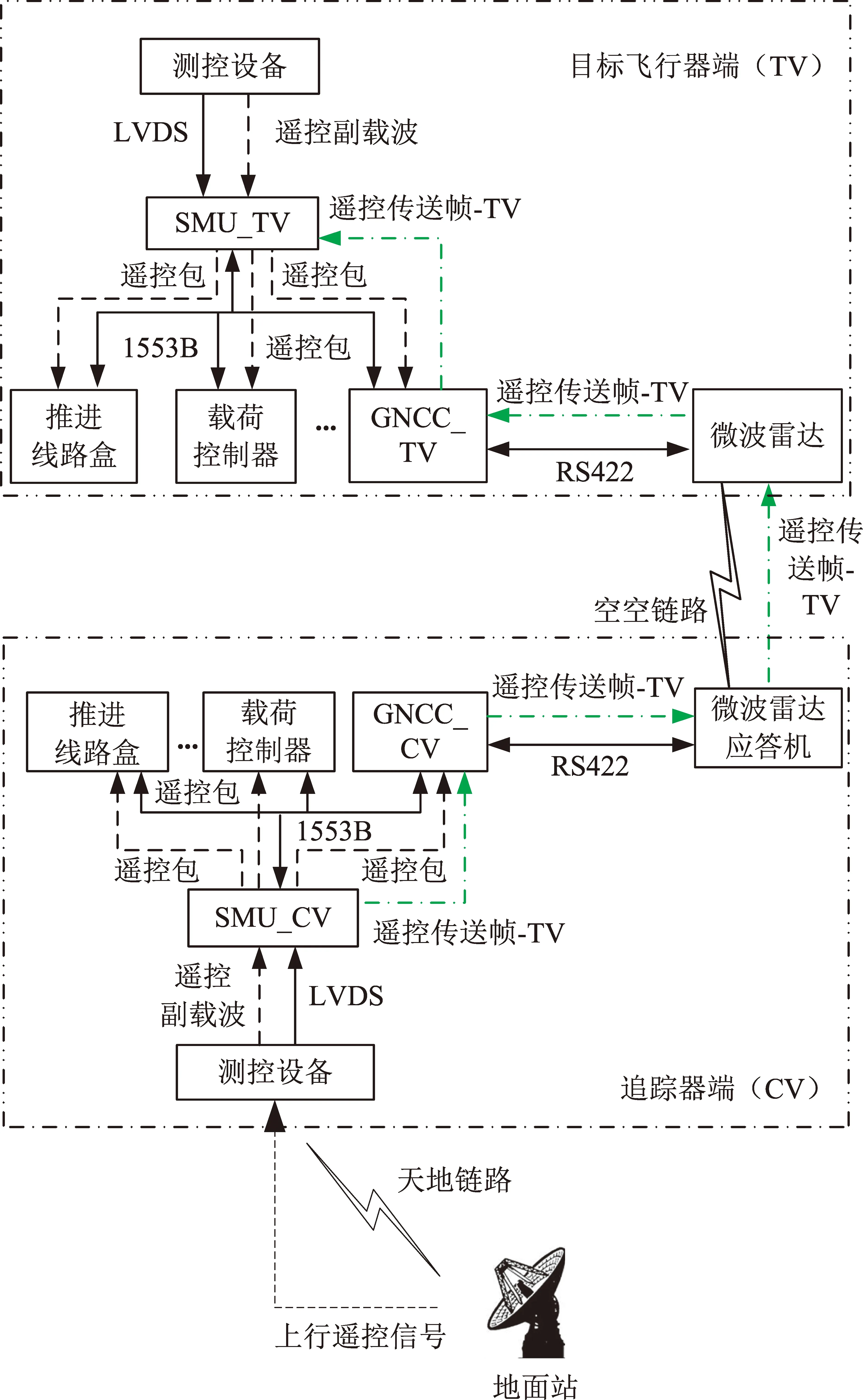
图7 以追踪器为中继上行遥控信息流Fig.7 Information flow of telecommand using CV relay
3.1.2 下行遥测信息流
目标飞行器(TV)和追踪器(CV)端数管计算机通过测控设备下行的遥测数据应具备按照虚拟信道调度策略分时调度虚拟调度功能,完成两个航天器的遥测源包下传,其中继下行遥控信息流如图8、9所示。这里以目标飞行器通过空空信道接收到追踪器的遥测数据为例,介绍下行遥测信息流的处理流程。
(1)追踪器侧数管计算机SMU_CV周期性通过1553B总线接收来自各个RT设备端的遥测源包(E-PDU)后,按遥测源包调度周期完成遥测源包的调度及其封装,形成虚拟信道数据单元VCDU-CV,其中VCDU-CV中的VC-ID标识设置为追踪器常规遥测源包。
(2)SMU_CV将形成后的VCDU-CV通过1553B总线发送至RT设备端的控制计算机GNCC_CV特定接收缓冲区,等待CCU取走。

图8 以目标飞行器为中继下行遥测信息流Fig.8 Information flow of telemetry using TV relay
(3)GNCC_CV周期性轮询该接收缓冲区,当查询到数据后,将该数据转发至微波雷达应答机。
(4)微波雷达应答机通过空空链路将数据发送至微波雷达主机。
(5)目标飞行器侧控制计算机GNCC_TV周期性轮询微波雷达主机接收数据缓冲区,当查询到数据后,将该数据放置总线发送缓冲区,等待数管计算机取走。
(6)目标飞行器侧数管计算机SMU_TV周期性查询各RT终端发送缓冲区数据,取走各RT终端的遥测源包以及GNCC_TV特定发送缓冲区的VCDU-CV数据。

图9 以追踪器为中继下行遥测信息流Fig.9 Information flow of telemetry using CV relay
(7)SMU-TV接收到数据后,将各RT终端的遥测源包按照遥测源包调度周期进行调度和封装,形成虚拟信道数据单元VCDU-TV,其中VC-ID标识设置为目标飞行器常规遥测源包。
(8)SMU-TV按照虚拟信号调度策略分时调度VCDU-CV和VCDU-TV,完成目标飞行器和追踪器两个飞行器的遥测源包下传。
3.2 试验验证
为验证上述设计方案的正确性,搭建试验验证平台进行数据流通性验证和数值分析,试验设备连接示意图如图10所示。
该试验系统中,SMU和GNCC之间采用1553B总线互联,选用国产J61580R芯片实现;GNCC与微波雷达、微波雷达应答机之间均采用RS-422平衡式异步串行接口,选用标准的差分发送和接收芯片HS1-26C31和HS1-26C32实现;微波雷达及其应答机之间通过微波高频信道完成伪码调制信号的发射与接收。各设备之间的数据传输码率均以航天器已完成在轨试验验证的速率进行设置,如表1所示。

表1 参数设置说明
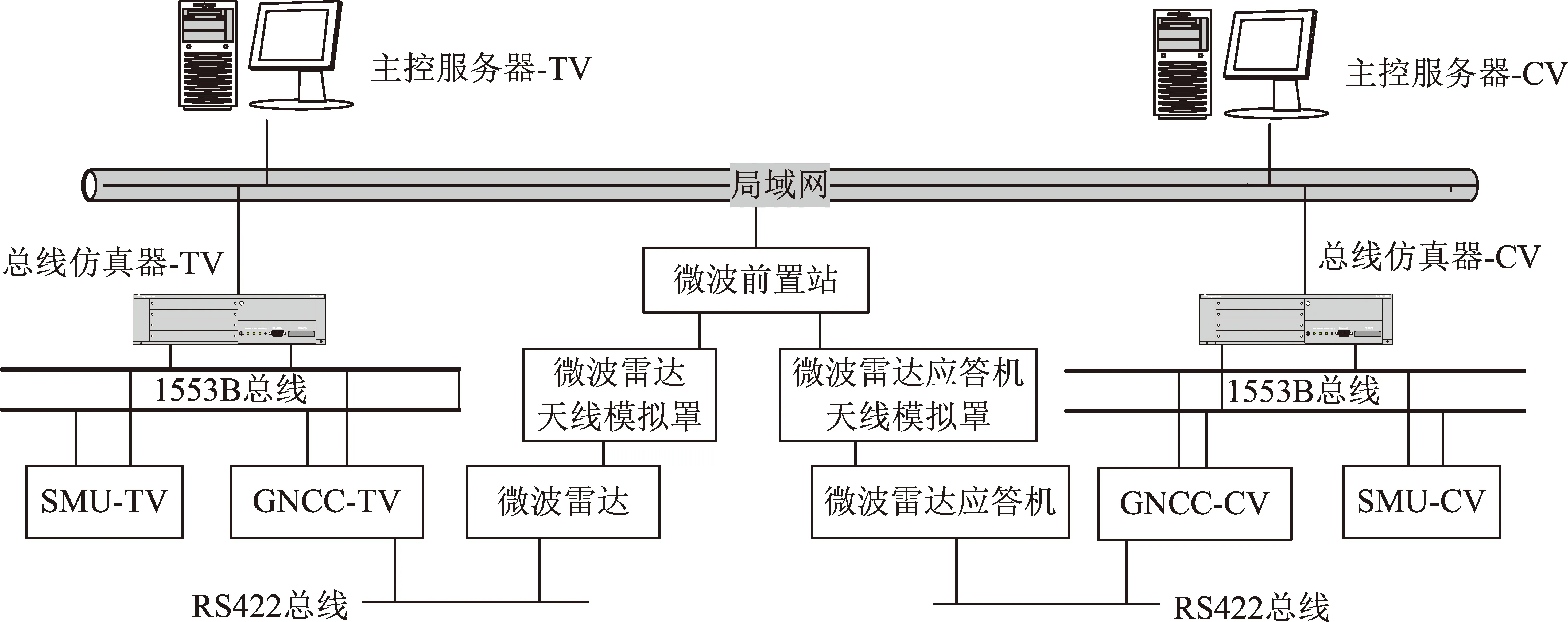
图10 试验系统连接示意图Fig.10 Connection of experimental system
利用试验系统,进行测试项目的验证:
(1)通过目标飞行器主控服务器发送追踪器遥控指令,对目标飞行器作为中继的指令信道连通性进行验证;
(2)通过追踪器主控服务器发送目标飞行器遥控指令,对追踪器作为中继的指令信道连通性进行验证;
(3)通过目标飞行器主控服务器,修改SMU_TV中追踪器虚拟信道调度周期,对目标飞行器作为中继下行追踪器遥测的信道连通性进行验证;
(4)通过追踪器主控服务器,修改SMU_CV中目标飞行器虚拟信道调度周期,对追踪器作为中继下行目标飞行器遥测的信道连通性进行验证。
在对上述信道连通性进行验证的基础上,同时对信道的传输性能进行评估。以下主要从两航天器间数据传输率和数据转发延时进行评估。
两航天器间的数据传输分别经过1553B总线、RS422总线以及空空链路。根据上述信息流传输路径,器间数据链路的数据传输率
RBI-O=
由于1553B、RS422总线数据传输率远大于空空链路的通信能力,因此,两航天器间数据链路的传输率近似等效于空空链路的传输率,即RBI-O≈RMW。
图11给出了不同长度下器间链路时延试验结果,可以看出,随着遥控注入数据长度的增加,时延相对变大。针对目前月球无人采样返回任务中所涉及到的最大长度1024 bit范围内的注入数据而言,基本时延不超过1 s左右。考虑到地月之间的距离大约为40万千米,仅电波的传输需要的时间至少需要1.3 s,因此不足1 s的数据转发时延能够适应月球无人采样返回任务中应急情况下在轨航天器的数据转发需求。而当数据长度超过1024 bit后,数据转发延时变化较大,因此对于需要上注超长注入数据时,需要额外评估其注入所引入的延时风险。
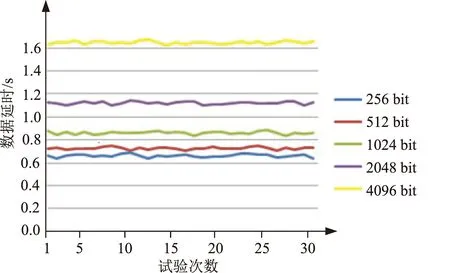
图11 不同字节长度器上传输时延对比Fig.11 Uplink delay ratio for different byte lengths
4 结束语
航天器的在轨运行,需要通过地面站上注指令并接收器上遥测进行航天器在轨操作和状态维护。因此,地面站与器上测控设备之间的通信链路就显得尤为重要。目前,航天器在轨上下行主要依靠地面站与器上测控设备之间的通信完成。本文在此基础上,通过相对导航敏感器建立的链路,实现了单一航天器除利用自身测控设备与地面站建立联系外,还可通过地面站、另一航天器的测控设备以及空空链路构建一条备份通路,用于上下行数据的自由传输。该方案是月球无人轨道交会对接任务中确保任务可靠性的一种重要技术手段,可作为在轨某一地面站或某一航天器测控设备出现故障时进行上下行链路备份的保障手段。
通过对空间数据传输协议以及器地上下行链路进行设计,给出了一种适用于月球轨道交会对接的空空通信实现方案,通过试验验证,该空空通信方案期间传输速率可达4 kbit/s,传输时延在数据长度不超过1024 bit时最高不超过1 s,可以完全满足在应急和故障条件下遥控和遥测数据的传输能力,对于未来的多器配合运行的深空探测任务具有重要的参考价值。
猜你喜欢
国际太空(2022年7期)2022-08-16
国际太空(2022年2期)2022-03-15
航天器工程(2022年1期)2022-02-21
国际太空(2019年9期)2019-10-23
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
东方少年·布老虎画刊(2018年2期)2018-05-14
小天使·二年级语数英综合(2017年10期)2017-10-31