一种导航卫星信号的相关特性快速评估方法
2020-05-15 10:56:58申洋赫张晓松刘彬闫金栋
航天器工程 2020年2期
申洋赫 张晓松 刘彬 闫金栋
(北京空间飞行器总体设计部,北京 100094)
地面接收机对卫星导航信号进行捕获、跟踪、解调,从而完成对用户的定位、测速、授时。信号处理过程均是利用接收信号与本地参考信号的相关特性来实现的。相关特性是衡量接收信号与本地信号在时间轴上偏移一段时长之后的相似程度,是基带信号处理的基础,决定着导航系统的定位、测速、授时等关键性能和指标[1-2]。相关特性的优劣可用相关曲线来衡量,伪码跟踪性能和测距精度分别与相关曲线的对称性和尖锐程度直接相关。如果导航信号发生异常,会导致其相关曲线出现“变形”、“多峰”等异常现象,通过观察相关曲线的特征可以对信号进行监测。
开展导航信号相关特性评估,可提高导航卫星载荷测试的全面性,暴露出传统测试方法所不能挖掘的细节问题,最终可优化导航信号体制设计。导航信号相关特性的实际应用面临信号种类繁多,多星并行等复杂测试工况,在信号采集设备工作模式、采集信号特征估计算法方面尚未形成统一标准,进而影响了测试效率不能满足多种信号、多星并行的需求[3-6]。目前利用信号采集设备采集信号时,采样时钟通常利用内部的高稳晶振,将增加信号频率估计的搜索运算量;另外,为防止模拟-数字转换(ADC)在信号采样过程中发生混叠,采样频率远大于数字基带信号的带宽,因此捕获和跟踪算法的运算量增加,从而导致相关特性评估方法耗时较长[7-8],无法满足对其高效快速评估的需求。
针对上述问题,本文提出一种快速评估导航信号相关特性的方法。与传统方法相比,本文方法利用星地同源的采集模式,对信号捕获跟踪环节增加了抗混叠滤波和抽取处理,并对生成的相关曲线进行内插,从而有效提高评估速度,解决传统相关特性评估方法耗时较长的问题。
1 闭环相关特性分析
对导航信号进行评估,往往需要评估一段时间内的信号。闭环相关特性分析一方面可利用前一时刻的经验数据进行跟踪,实时估计导航信号载波频率和载波相位,对其进行载波剥离产生基带信号,继而进行相关特性分析;另一方面在捕获的码相位的基础上进一步提高其估计精度,有助于信号质量的评估。
闭环相关特性的分析主要包括以下步骤:①首先将采集数据送入到软件接收机,进行信号捕获和跟踪处理;②根据跟踪环路结果,将接收信号进行载波剥离,可复现接收信号的测距码片;③与本地测距码的互相关,可以产生导航信号的相关曲线;④通过观察相关曲线的特征可对信号进行监测。
信号的捕获和跟踪是闭环相关特性分析的基础,若这两个环节运行缓慢,则会严重制约信号评估的速度,因此本文重点对信号的捕获和跟踪环节进行改进,从而提高导航信号评估的效率。
1.1 一种改进的基于FFT的捕获算法
基于时域相关器的捕获算法是一种常用方法,它从多普勒频率和伪码两个维度对信号进行串行搜索,运算量巨大。作为信号相关特性分析的第一步,若信号捕获耗时较长,势必也会限制整个系统运行的速度。鉴于工厂阶段对卫星相关特性进行分析,可采取星地同源(即使用卫星输出的10 MHz原子钟信号作为采集设备的外源时钟),可使多普勒频移范围相对较小,即加快其在频率上的搜索时间。因此,本节重点寻找一种可在伪码维度实现并行搜索的算法。由于基于快速傅里叶变换(FFT)的捕获可实现在伪码维度的并行搜索,本文拟采用基于FFT的算法对信号捕获。
在导航接收机射频前端,为防止ADC在信号采样过程中发生混叠,采样频率经常大于奈奎斯特定理所要求的采样频率(即过采样)。然而,过采样一般远大于数字基带信号的带宽,导致捕获采样点数增多,对基于FFT变换的捕获算法来讲,将会涉及到大点数的FFT变换,因此增加了捕获的计算量。
为了既拥有过采样的优点而又尽量减少捕获处理的运算量,本文拟对上述算法中的基带信号进行整数倍抽取。若基带信号的频谱函数为X(ejω),对其进行M倍抽取,则根据信号处理理论可知[9]
(1)
式中:ω为信号的角频率;M为抽取的整数倍数;k为序号,取值范围为0至M-1;Y(eiω)是M倍抽取后序列的频谱函数。首先将原序列的X(ejω)扩展M倍,接着将其右移2π的整数倍,最后将M个扩展移位的频谱函数进行平均,这个过程容易造成频谱混叠。
根据序列抽取频谱不混叠的奈奎斯特条件,如图1所示,本文先对基带信号进行抗混叠低通滤波,将序列的有效频带限制在折叠频率fs/(2M)以内,然后再对其进行M倍抽取,最终计算其同相和正交支路的相关值,如下
(2)

(3)
式中:r(ω),lI(ω),lQ(ω),sL(ω)分别为r(Mk),lI(Mk),h(Mk),lQ(Mk)的频域形式;H(ω)为抗混叠滤波器的传输函数,呈低通特性。
不断改变本地伪码信号的角频率(本文采用星地同源,可有效减少角频率的改变次数,加速相关结果出现最大值),直至式(4)中相关结果R出现最大值。
(4)
此时所对应的伪码相位值以及设置的本地载波角频率即为信号伪码相位和载波角频率的粗略估计。
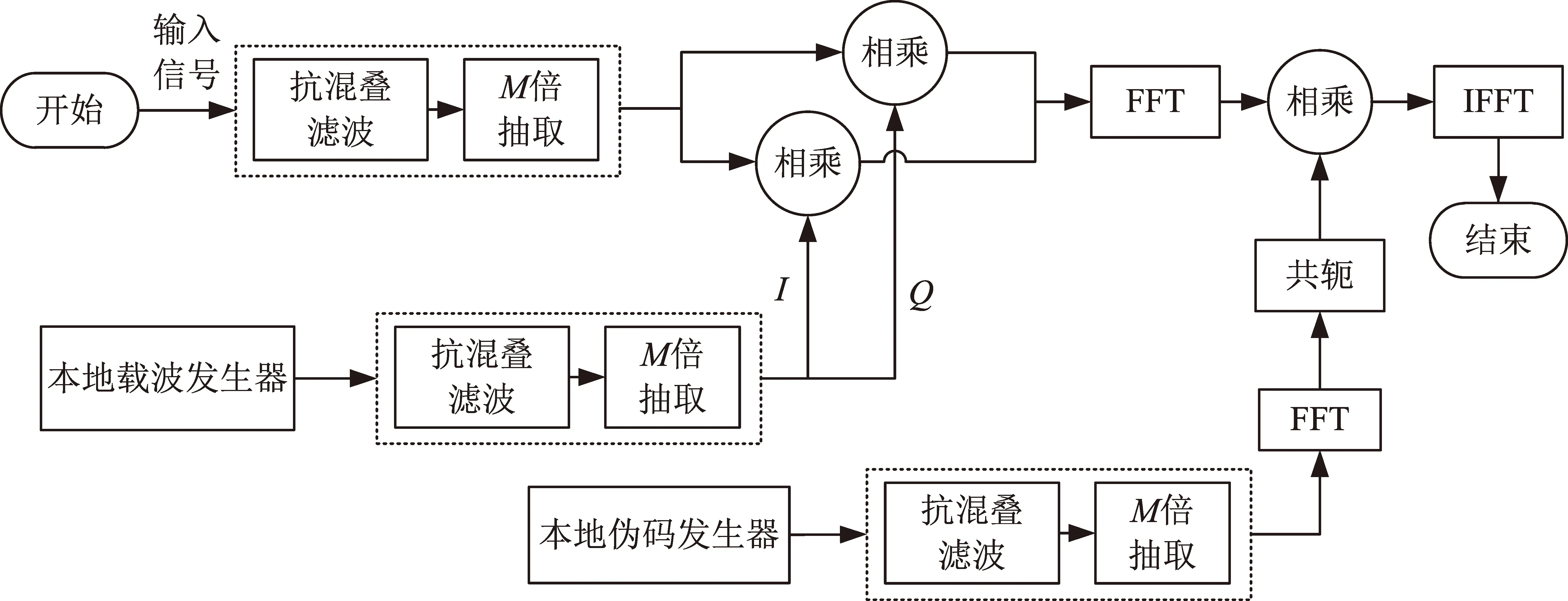
图1 改进的基于FFT的捕获算法Fig.1 Modified acquisition method based on FFT
1.2 基于抽取的导航信号跟踪环路
导航信号跟踪环路是闭环信号相关域系统的重要模块,可对伪码和载波进行精确地实时跟踪[9-10]。扩频码和载波的跟踪是一个相互耦合并且很复杂的问题。如图2所示,中频信号sIF(n)首先与载波环所复制的载波混频,产生I、Q两路混频结果i和q,它们分别与码环所复制的超前、即时和滞后三份伪随机码进行相关;即时路的相关值被当做载波环鉴别器的输入,其他两条支路上的相关值作为码环鉴别器的输入;最终,载波环和码环分别对它们的鉴别器输出值进行滤波,将滤波结果用来调节各自的载波数控振荡器和码数控振荡器的输出相位和频率等状态,使载波环所复制的载波与接收载波保持一致,同时又使码环所复制的即时码与接收伪随机码保持一致,以保证下一时刻接收信号的载波和伪随机码被彻底剥离;最终载波环鉴别器可以解调出导航电文数据比特。
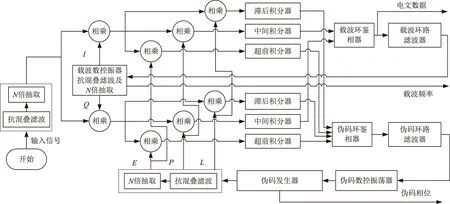
图2 改进的跟踪环路Fig.2 Modified tracking loop
跟踪环路一般采用二阶环路滤波器,其能够很好地跟踪相位阶跃和频率阶跃信号,可处理绝大多数时间内导航接收机收到的导航信号,另外在环路复杂性和稳定性方面也比较理想。
整个跟踪环路的传输函数为
(5)
式中:ωn和ζ分别为特征频率和阻尼系数;s为拉普拉斯变换参数。
根据1.1节的分析,跟踪环路中也存在过采样的问题,无疑会增加中频信号处理的运算量因此本文同样对图2中的I、Q两路混频结果采取先抗混叠滤波再N倍抽取的措施,从而提高跟踪环路处理速度。
跟踪环路中的3条支路相关积分值可表示为
(6)

(7)

1.3 载波剥离和相关特性分析
利用跟踪环路输出的采集信号伪码相位和载波角频率的精确估计,将采集信号进行载波剥离,复现测距伪码信号,便可进行相关特性分析。理论分析如下。
若p(k)表示复现伪码信号,l(k)表示生成的本地测距码,为便于分析,其相关函数R(τi)可写为傅里叶逆转换形式
(8)
式中:P(ejω),L(ejω)分别表示复现伪码信号和本地测距码信号的频谱函数;τi表示伪码信号与测距码信号的相位差。
由于1.2节信号跟踪环中对基带信号进行了N倍抽取,复现的伪码信号以及生成的本地测距码信号也均被N倍降采样,它们的频谱函数分别用Pdown(ejω)和Ldown(ejω),根据信号处理理论,其可写为
(9)
由式(9)可知,降采样后复现的伪码信号和生成的本地测距信号的频谱容易发生混叠,经过离散傅里叶逆转换后,其时域信号(即相关曲线)将会失真,不能真实地分析其相关特性。
文献[11]研究了利用二次曲线插值法对相关曲线进行插值,但由于已知数据点通常存在误差,从而使插值曲线逼近效果不理想。本文利用文献[12]中构造最小二乘插值函数的方法对相关曲线进行插值,从而可真实地分析其相关特性。
已知上述相关函数R(τi)产生的离散数据(τi,R(τi)),i=0,1,…,n,且n+1个互异插值节点存在如下关系τ0<τ1<τ2<…<τn,形成插值区间[τ0,τn],在插值区间中寻找一个插值函数C(τi),使C(τi)与R(τi)的误差平方和在最小二乘条件下最小,确定的函数即为插值函数,从而形成逼近真实的相关曲线,具体步骤可见图3。本文方法还可分析任意波形发生器产生的模拟信号,观察不同干扰对相关曲线的畸变影响,可为干扰信号的优化积累数据。

图3 闭环信号相关特性分析流程Fig.3 Analysis process of closed-loop signal correlation characteristics
2 实测数据分析
为验证本文提出的方法,利用某系列信号采集设备对工厂阶段某导航卫星的下行信号进行采集,采样率为650 MS/s,参考时钟输入为卫星原子钟的10 MHz信号,前面已提及,这样做的好处为尽可能地实现星地同源。对捕获来讲,减少频域搜索范围,充分利用伪码相位并行搜索的优点。本节主要分析频率为1 561.098 MHz、带宽为±2.046 MHz的信号,将传统分析方法(基于FFT的捕获以及常规跟踪环路)作为参照,分析本文提出的改进方法所带来的优势。
首先分析传统方法和改进方法(捕获130倍抽取、跟踪50倍抽取)捕获跟踪的细节。分别对导航卫星在卫星号、载波频率、伪码相位3个维度进行捕获。经过对37颗导航卫星的搜索后,可获得卫星的信号特征。对比可知,2种方法除了对伪码相位的估计不同之外,其他参数完全一致,由于改进方法对基带信号进行了抽取,估计的码相位自然不同。前文已介绍,捕获对码相位只要求粗略估计,650 MS/s的采样频率对于码速率为2.046 MS/s的信号来讲过于浪费,因此改进方法对基带信号进行了130倍抽取,降采样为5 MS/s,对码相位的估计精度依然可以达到0.5个码片之内,完全可满足捕获对码相位粗略跟踪的要求;这种方法带来的优势确是显而易见的,将捕获时间由原来的103.18 s减少到15.58 s。
信号跟踪环路经过反馈回路的动态调整,环路的鉴相器以及滤波器均达到稳态,信号被成功跟踪,可得到即时、超前、滞后三路相关值,并且即时路的I路(同相)可输出数据比特,即时路的Q路(正交)输出噪声。为了保证跟踪环路对码相位的高精度估计,改进方法对基带信号进行了50倍抽取,处理时间由传统方法的87.92 s减少到72.76 s。
码环鉴相器初始值来自于捕获算法码相位的粗略估计,本文捕获算法对基带信号进行了抽取,牺牲估计精度换取速度(但可满足对码相位粗略跟踪的要求),如图4和图5所示,与传统方法码环鉴相器相比,改进方法码环鉴相器在初始时刻的输出幅度较大,但是经过码环的反馈调节,输出数值越来越小,最终码相位数据得到收敛。
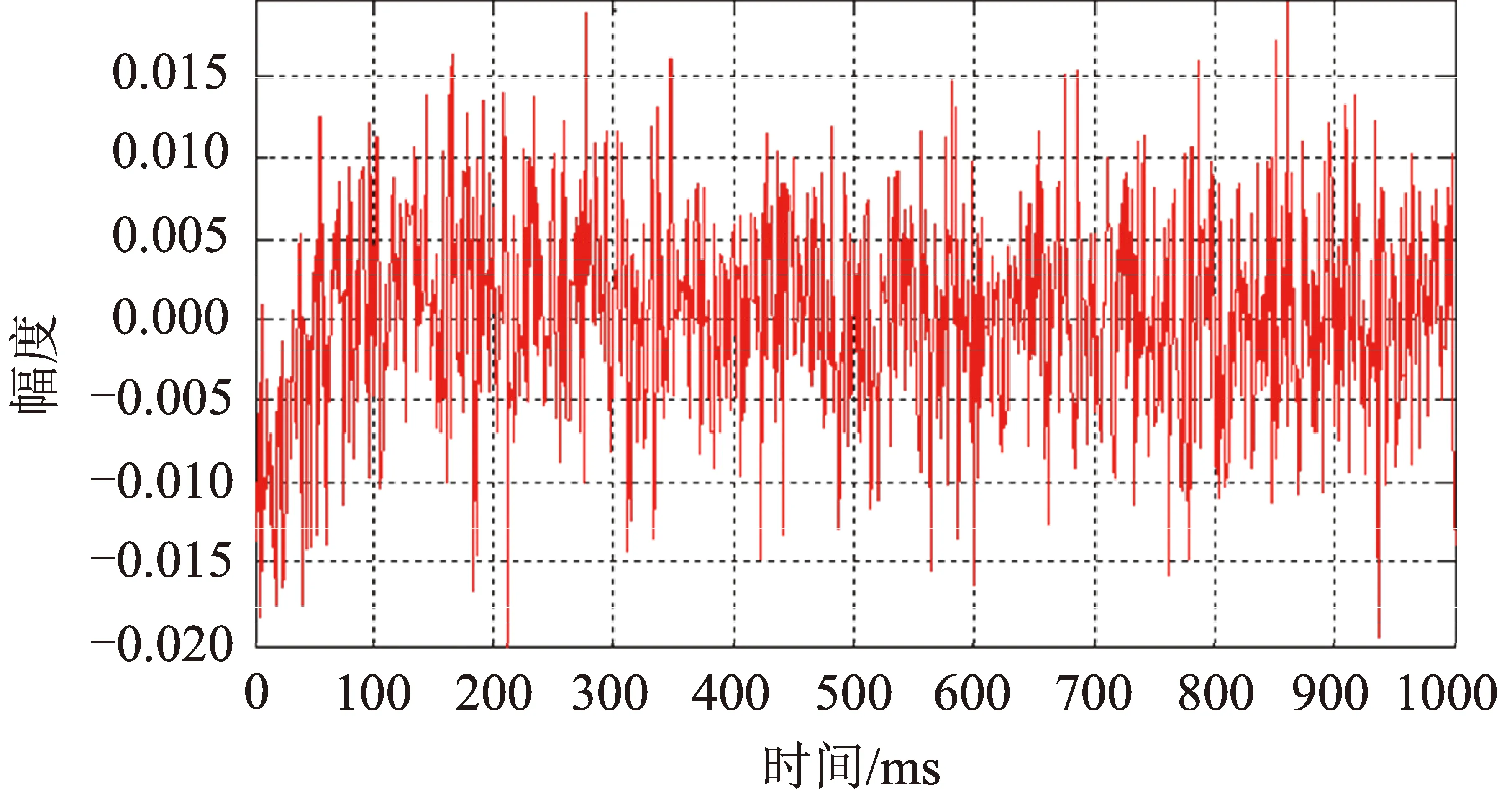
图4 传统方法码环鉴相器结果Fig.4 Phase discriminator result of the traditional tracking loop
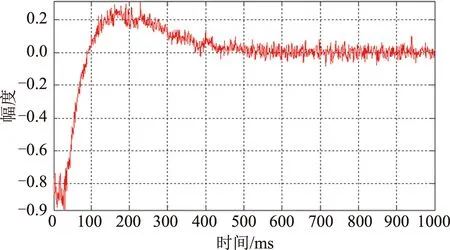
图5 改进方法码环鉴相器结果Fig.5 Phase discriminator result of modified tracking loop
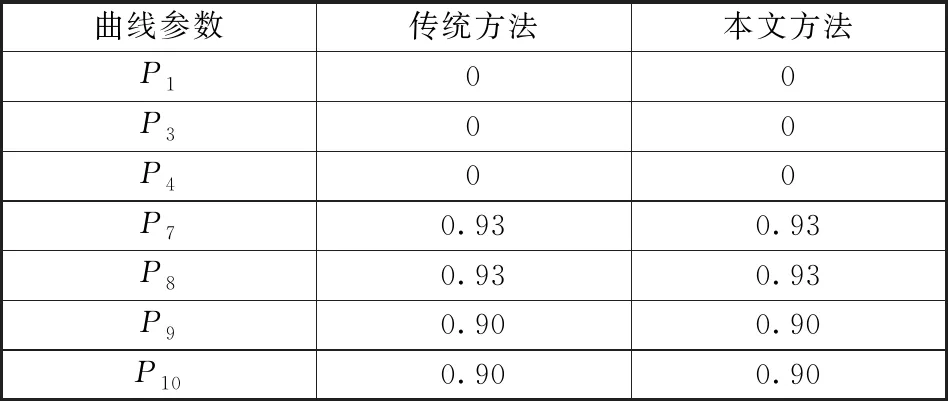
如图6所示,验证了1.3节中对相关曲线进行插值的效果。由于射频前端的带宽是受限的,导航信号的自相关函数不再具有尖锐的尖角,而是变得圆滑而平缓。图6(a)中绘制的是未对相关曲线进行插值的情形。可见由于跟踪环路中对基带信号进行抽取,复现的伪码信号采样率偏低,导致相关曲线变得失真,不能用于相关特性的分析;而对相关曲线进行插值后,图6(b)中的相关曲线圆滑而平缓,可真实地反映导航信号的相关特性。图7给出了传统方法分析出的相关曲线,对图6(b)和图7相关曲线的形状一致性进行评估[13]:设相关峰曲线的最大值为R0,距离最大值R0为0.05码片、0.10码片的相关曲线的取值记为R-0.05,R0.05,R-0.10,R0.10,通常相关曲线的评估参数可写为
(10)
P1=P4-P3
式中:当i=3,4时,m取值分别为0.05,0.10;当i=7,8,9,10时,n取值分别为-0.05,0.05,-0.10,0.10。分别利用式(10)计算本文方法和传统方法相关曲线的评估参数,结果如表1所示。
表1的数据表明2条曲线的评估参数相同,其形状完全一致,从而印证了改进算法的有效性。
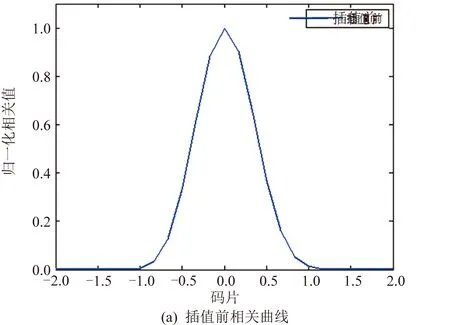
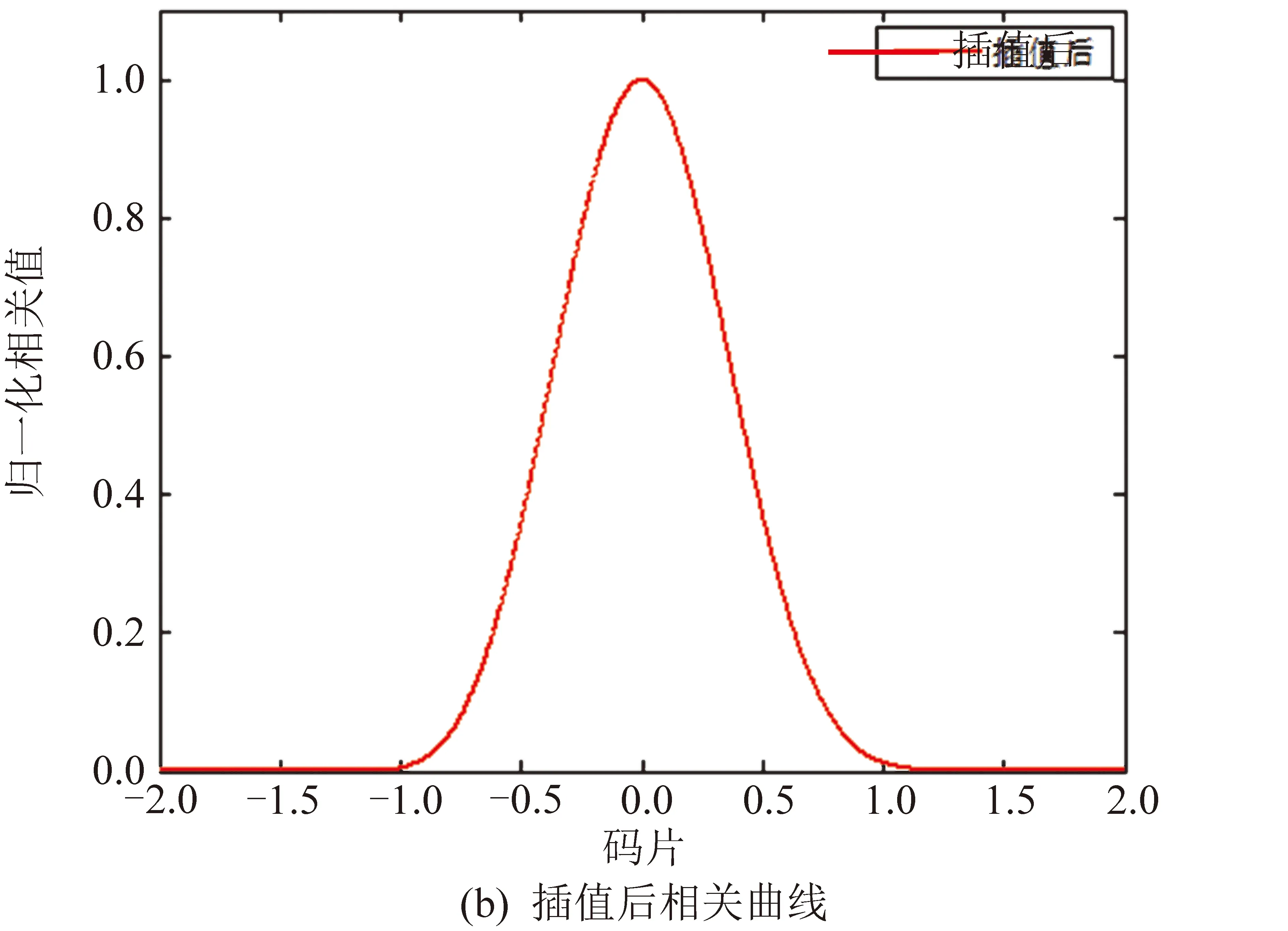
图6 本文方法相关曲线结果Fig.6 Correlation curve of this work
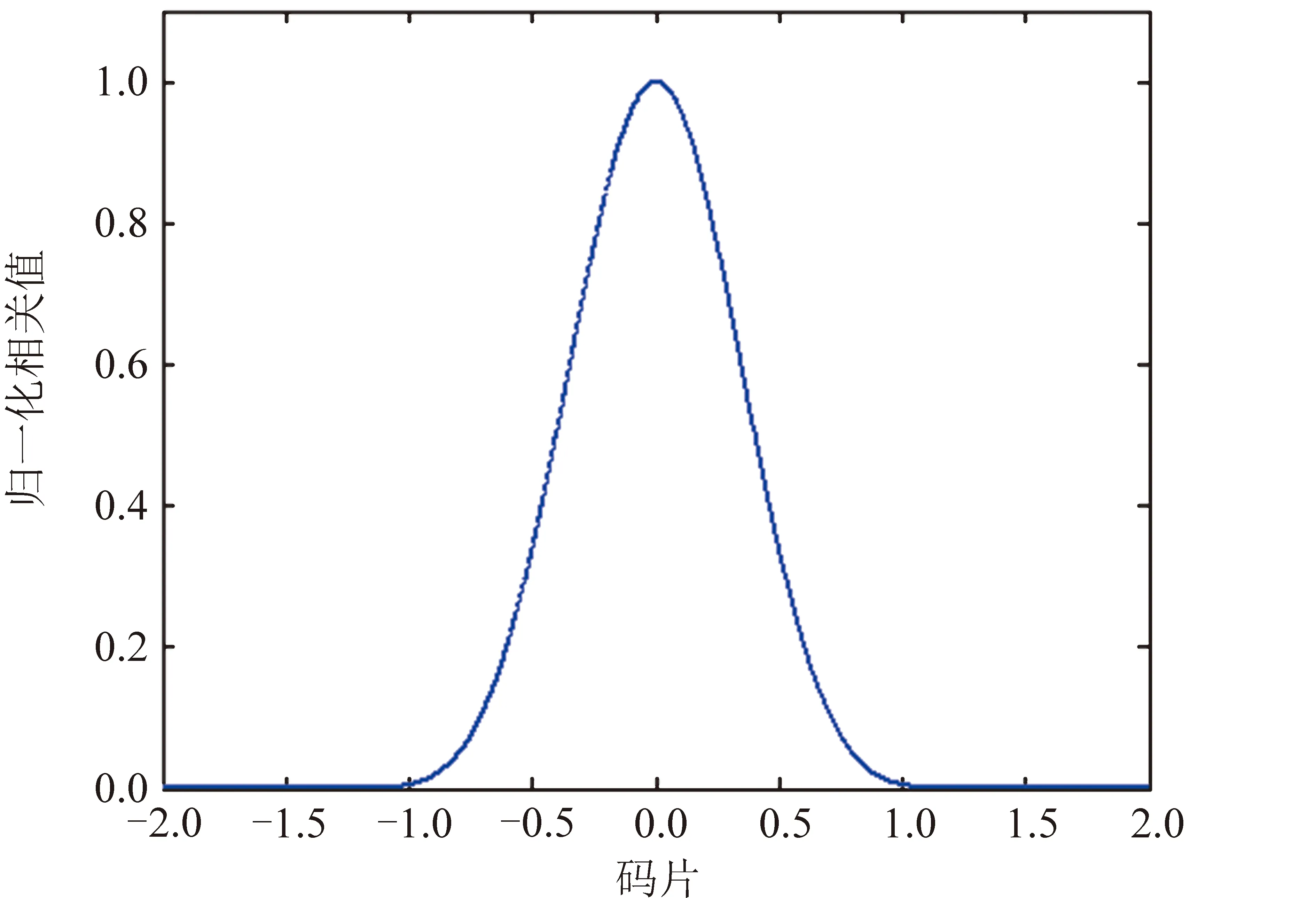
图7 传统方法相关曲线Fig.7 Correlation curve of the traditional method
表1 传统方法与本文方法相关曲线参数对比
Table 1 Parameter comparison of correlation curves of traditional method and proposed method
曲线参数传统方法本文方法P100P300P400P70.930.93P80.930.93P90.900.90P100.900.90
3 结束语
本文针对传统相干特性评估方法耗时较长的问题,进行了技术改进:
(1)针对信号捕获算法,采用卫星输出的10 MHz原子钟信号作为采集设备的输入时钟,可加快其在频率维度的搜索;增加了抗混叠滤波及抽取模块,可降低其在伪码维度的搜索运算量。实测结果表明捕获时间可由传统方法的103.18 s减少至15.58 s。
(2)针对信号跟踪算法,在输入信号、本地载波发生器、伪码发生器后端增加了抗混叠滤波及抽取模块,可减少超前、即时、滞后多支路相关运算量,实测结果表明跟踪时间可由传统方法的87.92 s减少至72.76 s。
(3)针对新增抽取模块导致相关曲线失真的问题,本文通过构造插值函数,复现真实的相关曲线,并对本文方法和传统方法的相关曲线参数进行评估,结果表明2条相关曲线的评估参数相同,形状一致。
本文所提方法可应用于导航卫星工厂电测阶段相关特性的高效评估。此外,具备干扰检测功能的导航接收机有着较为可观的市场前景,其为提高接收信号的载噪比,需额外增加相干积分时间,将严重影响接收机的实时性。本文方法不仅可有效检测干扰信号,还可改善接收机的实时性,可应用于上述技术领域。
猜你喜欢
杭州电子科技大学学报(自然科学版)(2023年3期)2023-06-30 06:57:34
上海公路(2018年4期)2018-03-21 05:57:46
探测与控制学报(2015年4期)2015-12-15 15:00:50
数字通信世界(2015年5期)2015-04-04 13:28:15
集美大学学报(自然科学版)(2015年4期)2015-02-28 01:13:39
石家庄理工职业学院学术研究(2014年4期)2014-04-27 14:14:41
电测与仪表(2014年8期)2014-04-04 09:19:36
陕西理工大学学报(自然科学版)(2014年6期)2014-03-25 00:37:44
电视技术(2014年19期)2014-03-11 15:38:10
现代防御技术(2014年6期)2014-02-28 18:26:27