基于自适应PD的永磁同步电机转速控制研究
2020-05-11 11:43李亚宁
微型电脑应用 2020年1期

摘 要: 介绍了一种基于自适应PD算法的永磁同步电机转速控制,提出了一种简化型自适应策略,对PD参数进行在线自校正,与传统PD控制器相比,增强了控制器对电机非线性、时变性及扰动的响应性能。且该自适应策略结构简单,更易于工程实现,具有一定的工程实用价值。系统仿真结果表明,与传统PD控制效果对比,响应过渡时间更短,超调量更小。
关键词: 自适应; PD; 永磁同步电机; 控制; 转速
中图分类号: TP391 文献标志码: A
Speed Control of Permanent Magnet Synchronous Motor Based on Adaptve PD
L Yanng
(Basc Repartment, Ar Force Engneerng Unversty, Xan 710051)
Abstract: Ths paper ntroduces a speed control of permanent magnet synchronous motor based on adaptve PD algorthm, and proposes a smplfed self-adaptve strategy to carry out onlne self-correcton of PD parameters. Compared wth tradtonal PD controller, the controller enhances ts response performance to nonlnear, tme-varyng and dsturbance of motor. Moreover, the adaptve strategy s wth a smple structure, easy to mplement n engneerng, and has a certan practcal value n engneerng. The smulaton results show that compared wth the tradtonal PD control, the response transton tme s shorter and the overshoot s smaller.
Key words: Adaptve; PD; PMSM; Control; Speed
0 引言
隨着电机技术的发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)由于具备体积小、效率高且高可靠性等优势,得到越来越多的工程应用。特别是在高精度伺服转速控制领域,由于电机矢量控制表现出的力矩波动小的特性,使得低速控制效果优越,永磁同步电机的矢量控制表现出更优越的转速控制效果[1]。
永磁同步电机的本体具有非线性、时变性及强耦合特性,传统PD控制器属于线性控制器,定常的参数使得在转速控制效果上具有一定局限性。随着对电机转速性能的需求提升,出现了基于模糊推理、自适应、神经网络、遗传算法等智能控制算法[2-5]。其中,自适应控制可分为模型参考自适应控制和自校正自适应控制。模型参考自适应要选取合适的参考模型非常困难,且模型很难得到实现,自身的缺陷使得模型参考自适应目前无法得到广泛应用。在线自校正自适应控制以经典控制为基础,通过自适应策略机构在线调整控制参数,提升控制品质。问题的关键在于自适应策略的设计,本文提出了一种结构简单的自适应机构,工程实现简单,且能够取得较好的电机转速控制效果,具有一定的工程实用性。
1 永磁同步电机数学模型
永磁同步电机的矢量控制基本原理是将定子上的电流通过坐标转换分解成直轴分量d和交轴分量q。通过控制q=0,控制调节d的大小达到控制电机输出力矩的目的[6]。小功率电机的电感相对很小,忽略电机电感的影响,可以将矢量控制简化为控制电压分量的问题,问题转换为控制Uq=0,控制调节Ud的大小从而达到控制电机转速的目的。坐标转换过程如下,静止三相ABC电压坐标系转换到两相αβ静止坐标系的变换矩阵为:Uα
Uβ=231-1/2-1/2
03/2-3/2Ua
Ub
Uc 两相αβ静止坐标系转换到两相dq旋转坐标系的变换矩阵为:Ud
Uq=cos θsn θ
-sn θcos θ Uα
Uβ 式中θ表示电机转子相对定子的电角度,可以通过与电机同轴按照的高精度编码器或旋转变压器等测角传感器获取。
本文设计的永磁同步电机转速控制结构图如图1所示。
控制系统省略了电流环控制回路[7],简化了系统结构,通过以上坐标变换矩阵的逆变换,即可将两相直流电压分量转换为驱动永磁同步电机的三相交流分量。系统主要工作过程是通过位置传感器的微分折算出电机的实际转速,将实际转速与设定转速进行偏差运算,将所得偏差输入控制器,控制器输出Ud电压值,另外将Uq设置为零,通过上述坐标变换的反变换,从而得到施加到电机上的三相电压。
2 自适应PD控制策略
假设在电机转速控制系统中,转速偏差e(t)的响应变化曲线如图2所示。
图2中,在第1和3区域中,偏差和偏差微分的积ee′>0,这时偏差向着增大的趋势发展,此时应该增加控制作用,使偏差降低。在第2和3区域中,偏差和偏差微分的积ee′<0,这时偏差向着减小的趋势发展,此时应该减少控制作用,降低响应超调量。
因此,根据以上推断确定如下的自适应控制方案:
(1) 首先,电机转速控制器一般选用P控制器[8],根据电机参数及负载惯量,利用经典控制理论校正方法推算出最优参数(Kp、K),将其作为控制器的初始值。
(2) 对Kp进行搜索校正。根据ee′>0时,逐渐增大比例系数Kp值;ee′<0时,逐渐减小比例系数Kp值,得到Kp推算公式:Kp(k+1)=Kp(k)+ηe(k)Δe(k)式中,η表示搜索步长,其取值的大小是影响系统响应的关键,可以通过最优化的方法进行选定。对η进行最优化选择时,最优化目标函数可选为[9]:Qmn=∫t0t|e|dt 通过多次仿真实验,以使得目标函数值达到最小作为最优参数选择依据,可以确定η的论域。
3 仿真结果对比
以某小型永磁同步電机为研究对象,其电机相关参数如表1所示。
按照上文所述的控制策略,搭建系统控制模型如图3所示。
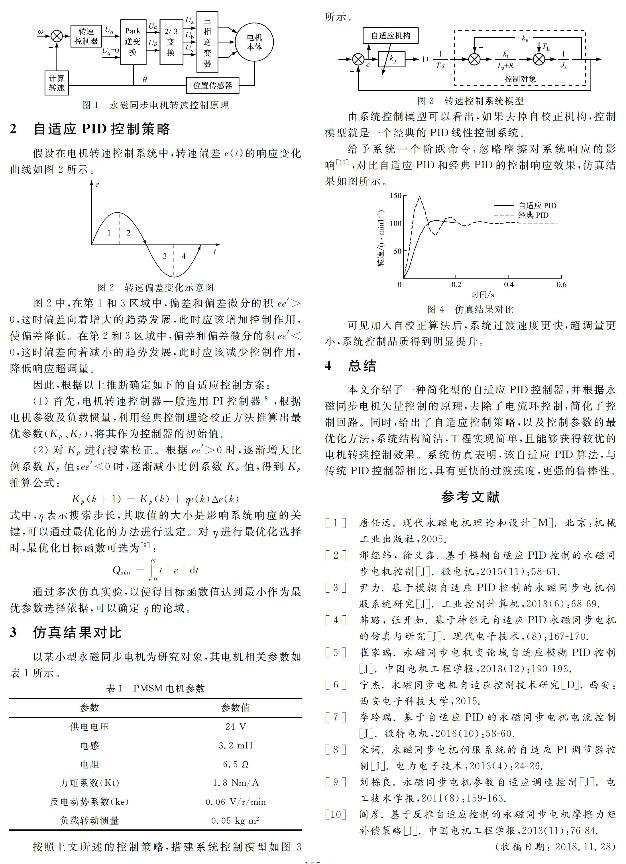
由系统控制模型可以看出,如果去掉自校正机构,控制模型就是一个经典的PD线性控制系统。
给予系统一个阶跃命令,忽略摩擦对系统响应的影响[10],对比自适应PD和经典PD的控制响应效果,仿真结果如图所示。
可见加入自校正算法后,系统过渡速度更快,超调量更小,系统控制品质得到明显提升。
4 总结
本文介绍了一种简化型的自适应PD控制器,并根据永磁同步电机矢量控制的原理,去除了电流环控制,简化了控制回路。同时,给出了自适应控制策略,以及控制参数的最优化方法,系统结构简洁,工程实现简单,且能够获得较优的电机转速控制效果。系统仿真表明,该自适应PD算法,与传统PD控制器相比,具有更快的过渡速度,更强的鲁棒性。
参考文献
[1] 唐任远. 现代永磁电机理论和设计[M]. 北京:机械工业出版社,2005.
[2] 邢经纬, 徐义鑫. 基于模糊自适应PD控制的永磁同步电机控制[J]. 微电机,2015(11):58-61.
[3] 尹力. 基于模糊自适应PD控制的永磁同步电机伺服系统研究[J]. 工业控制计算机,2013(6):68-69.
[4] 韩璐, 张开如. 基于神经元自适应PD永磁同步电机的仿真与研究[J]. 现代电子技术,(8):167-170.
[5] 崔家瑞. 永磁同步电机变论域自适应模糊PD控制[J]. 中国电机工程学报,2013(12):190-193.
[6] 宁杰. 永磁同步电机自适应控制技术研究[D]. 西安:西安电子科技大学,2015.
[7] 李玲瑞. 基于自适应PD的永磁同步电机电流控制[J]. 微特电机,2016(10):58-60.
[8] 宋词. 永磁同步电机伺服系统的自适应P调节器控制[J]. 电力电子技术,2013(4):24-26.
[9] 刘栋良. 永磁同步电机参数自适应调速控制[J]. 电工技术学报,2011(8):159-163.
[10] 阎彦. 基于反推自适应控制的永磁同步电机摩擦力矩补偿策略[J]. 中国电机工程学报,2013(11):76-84.
(收稿日期: 2018.11.28)作者简介:李亚宁(1980-),女,西安市人,硕士研究生,讲师,研究方向:电子技术应用。文章编号:1007-757X(2020)01-0104-02
猜你喜欢
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
科技视界(2016年26期)2016-12-17
科教导刊·电子版(2016年26期)2016-11-21
汽车科技(2016年5期)2016-11-14
中国新通信(2016年16期)2016-10-18
科技视界(2016年21期)2016-10-17
大众理财顾问(2016年9期)2016-10-11
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28