ADS-B监视与程序管制融合研究
2020-05-11 11:22赵泽荣李雨峤李占宏
网络安全技术与应用 2020年5期
◆赵泽荣 李雨峤 李占宏
ADS-B监视与程序管制融合研究
◆赵泽荣1李雨峤2李占宏1
(1.中国民用航空飞行学院 四川 618307;2.东南大学 江苏 211189)
为了实现程序管制的信息化,本文在ADS-B监视系统可视化的基础上,融合了程序管制功能,采用C++与Opengl ES结合的开发平台,开发了程序管制的人机交互系统。该系统不仅能记录管制员在程序管制下的操作指挥流程,而且也提供了事后回放功能,特别是在监视信息中断的情况下,监视系统恢复到程序管制指挥功能。该系统不仅是程序管制的指挥工具,而且也是监视系统的备份,同时,该系统也可以作为管制员进行教学和复训的实战训练工具。
ADS-B;程序管制;融合处理;人机交互
1 概述
随着民航运输业的快速发展,空中流量大幅度增加,为了减轻管制员的工作负担,提高飞行效率,雷达监控、雷达管制等主动式管制已经成为基本管制手段[1]。如今正在推行的ADS-B监视技术,将会替代雷达管制成为下一代集通信、监视和导航为一体的空中交通管理系统[2]。但属地化管理的中小型机场由于受航班量、经济条件等限制,缺乏雷达等先进监控设备,仍主要依靠程序管制。相对于雷达管制,程序管制常被认为是“被动式服务”、“瞎子指挥”,因无法直观显示空中动态、需要机组配合通报、采用固定程序[3]。不论采用什么方式指挥飞机,程序管制都是每个管制员必须熟练掌握的基本技能,而“摆棋子”是增强管制员空中交通运行情况的辅助手段。所谓“摆棋子”是管制员通过旗子代表目标,在纸质航图上标识飞机的大概位置,是一种比较传统的空中交通指挥方式,它是其他指挥系统失效后的最原始的备份方法。到目前为止,“摆棋子”这种传统方法仅局限为实物的方式,虽然可靠,但有很多的缺陷,如缺乏灵活性、效率低等,最关键的是操作不可重现,对指挥的失误原因和责任的界定没有依据。随着计算机技术的发展,软硬件的可靠性大大提高,“摆棋子”的传统程序管制方法可以通过计算机进行可视化呈现,实现人机界面交互。因此本文采用C++与Opengl ES结合的开发平台,按照“摆棋子”的流程,关联飞行计划,设计开发一套替代“摆棋子”程序管制的实物软件,提高程序管制员的工作效率,同时,可引进ADS-B数据和雷达数据,当雷达系统和ADS-B监视系统失效的情况下,软件切换到“摆棋子”状态,并在界面呈现当前目标所在的位置,管制员根据当前目标的分布情况,按照程序管制的方式进行指挥飞机,而且该软件可以作为管制员进行教学的程序管制训练工具。
2 系统软件设计及实现
现阶段中国管制员培养院校都配备了雷达管制模拟机、程序管制模拟机及机场塔台管制模拟机,但通常都要求由“机长位”进行操作配合[4]。通过一个“机长位”对应一个管制员位、多个“机长位”对应多个“管制员位”等组合方式来实现模拟的管制场景,而且对“机长位”操作者的操作技能要求很高。这样的训练都是为了增加管制员对管制间隔的理解及提高管制意识,只是停留在对管制原理的理解及技能的训练,而且这样的模拟训练和实际的管制操作有一定的差别,为了弥补这样的不足,本软件的设计主要从实践的角度出发,引入真实的飞行数据,学员或工作人员可以采用雷达管制的方式来指挥飞行,同时在飞行数据中断的情况下,采用程序管制来指挥飞机。
2.1 系统构架
为了实现ADS-B监视与程序管制的融合,需要获取ADS-B数据,并对ADS-B监视数据的处理及显示等。系统构架如图1所示。在图1中,地面站接收飞机广播的ADS-B监视数据,并把ADS-B监视数据按照一定的协议标准组报,发送给ADS-B监视数据服务器,监视和程序管制终端通过登录ADS-B监视数据服务器获取数据,通过解析ADS-B监视数据,可以知道目标在空域中的分布情况,也为程序管制的初始空域分布提高了经纬度坐标、高度、航向及速度等参数,为程序管制流程的实现奠定了基础。
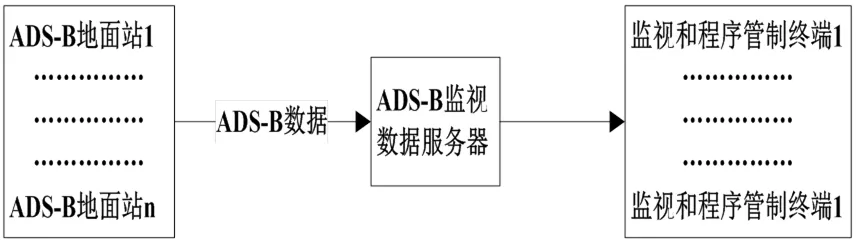
图1 系统构架示意图
2.2 监视和程序管制终端软件设计
监视和程序管制终端包括了系统参数初始化模块、系统显示参数配置处理模块、网络数据接收处理模块、ADS-B报文解析模块[5]、监视目标显示处理模块、程序管制目标显示处理模块、系统数据保存模块及数据回放处理模块。其功能示意图如图2所示。下面对每个功能模块作详细的论述。
(1)系统初始化模块:系统启动时,加载航线、导航点数据库;读取地形背景图;加载程序管制及监视目标显示的配置属性;读取登录服务器的配置信息等。
(2)系统显示参数配置处理模块:为用户提供航线、导航点的显示配置接口,方便用户设置适合自己的显示模式;同时也为用户提供了监视模式和程序管制模式下目标的显示方式设置,包括目标的形状、大小、颜色及标牌的显示内容等。
(3)网络数据接收模块处理:主要是根据初始化时读取的登录服务器配置信息,开启网络的处理功能,并登录服务器获取ADS-B监视数据,为了确保数据的安全性及登录的合法性,在登录服务器时,需要登录验证处理,而且接收到的ADS-B数据是加密处理过的,因此需要对数据包进行解密。
(4)ADS-B报文解析模块:主要是解析1090ES模式的CAT21报文[6]及UAT模式的CAT33报文[7]。
(5)监视目标显示模块:根据的显示配置参数和姿态数据,在界面显示目标,并相应用户对所有操作,如标牌拖动、目标测距及鼠标键对目标的操作设置等。
(6)程序管制目标的显示处理模块:显示目标的在电子航图上的位置,并响应用户移动目标到航图的任何位置,记录下用户对目标的每个操作细节,而且可以提供给用户设置目标的报告时间点、高度等,当目标到达预定的报告时间或高度时,界面会给管制员提示。
(7)系统参数保存模块:该模块处理系统需要保存的数据,主要有日志信息、显示配置信息、ADS-B监视数据及程序管制操作的详细过程等。
(8)数据回放模块:该模块需要回放的数据有ADS-B监视数据和程序管制操作流程数据,由于数据格式的不统一,需要进行时间上的匹配处理。在回放的时候,提供了快速、暂停、查询等功能,便于事后原因的查找及分析。
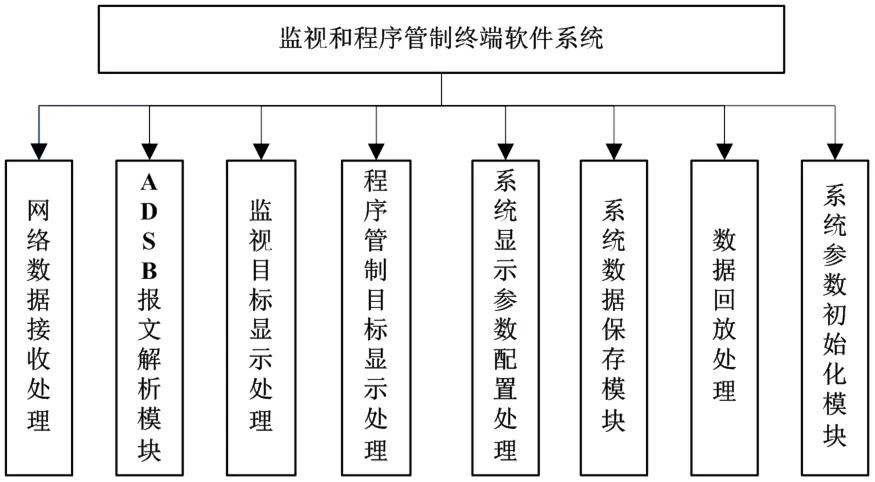
图2 终端功能模块示意图
软件启动时,根据图3所示的程序流程图,读取系统初始化参数,响应用户登录服务器,并获取ADS-B监视数据,解析报文并更新目标显示队列;当启动数据回放功能时,暂停网络数据对目标显示队列的更新,读取需要回放的监视数据及程序管制操作日志,并更新目标显示队列;当用户对目标和界面的显示进行设置时,根据设置的显示类型,把设置的显示参数分别更新到程序管制目标显示属性队列、航图显示属性队列和监视目标显示属性队列;整个界面的刷新通过定时器完成,轮换目标显示队列并匹配显示属性参数,实现监视目标的显示处理、程序管制目标显示处理和背景航图显示处理。
3 系统验证及案例分析
为了验证该融合系统的可行性及适用性,按照图1所示的构架,搭建了测试平台。ADS-B监视和程序管制终端登录了服务器,获取了ADS-B数据,并在监视界面按照监视模式显示目标在空域中的交通状态。如图4所示,效果图是在断开监视数据的情况下,目标在空域中的分布情况,现在的显示模式为程序管制,在该图中,目标的显示是按照“棋子”模式代替,而标牌显示了目标的呼号、速度及高度[8],管制员可以把速度为0的目标清场,以减少当前界面的交通复杂度。如果想获得目标的详细参数,可以把鼠标放在目标上,当呈现“手形”状态时,就会显示目标的详细参数;同时管制员可以在该状态下,移动目标到任何地方,这时管制员可以按照程序管制的原理来移动目标达到要求的位置,而且监视界面会记录了管制一切的操作。当管制员把飞机指挥到落地后,可以拖动目标到左下角的回收站中,从而删除了目标在界面上的显示,从而减轻管制员的心理压力。在程序管制的过程中,该界面提供了对目标时间报告点、高度报告点、等待位置报告点等参数设置的接口,当目标达到一定的时间门限后,在界面上会提醒管制员,该目标应该到了进行空中对话的要求,有利于管制员对多个目标的交通指挥。
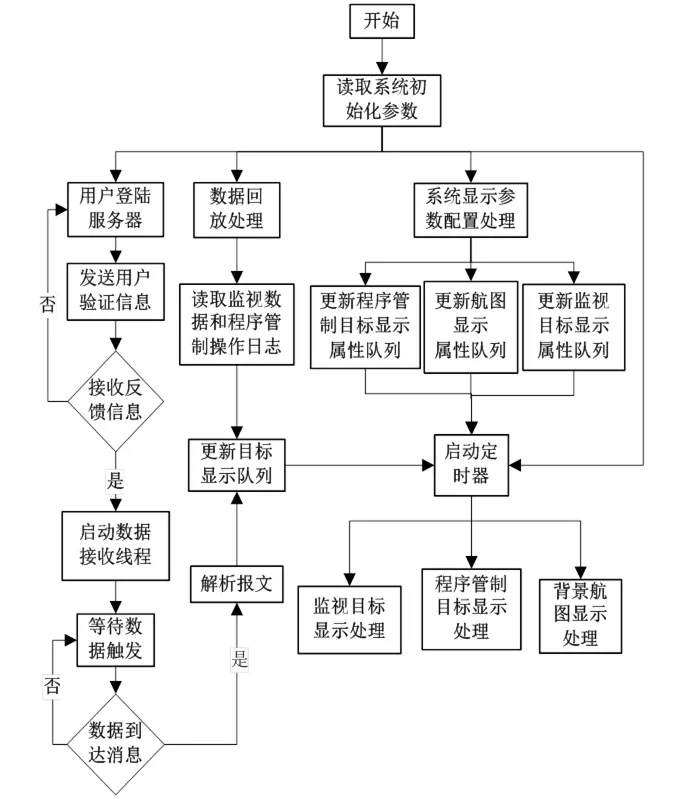
图3 程序设计流程图
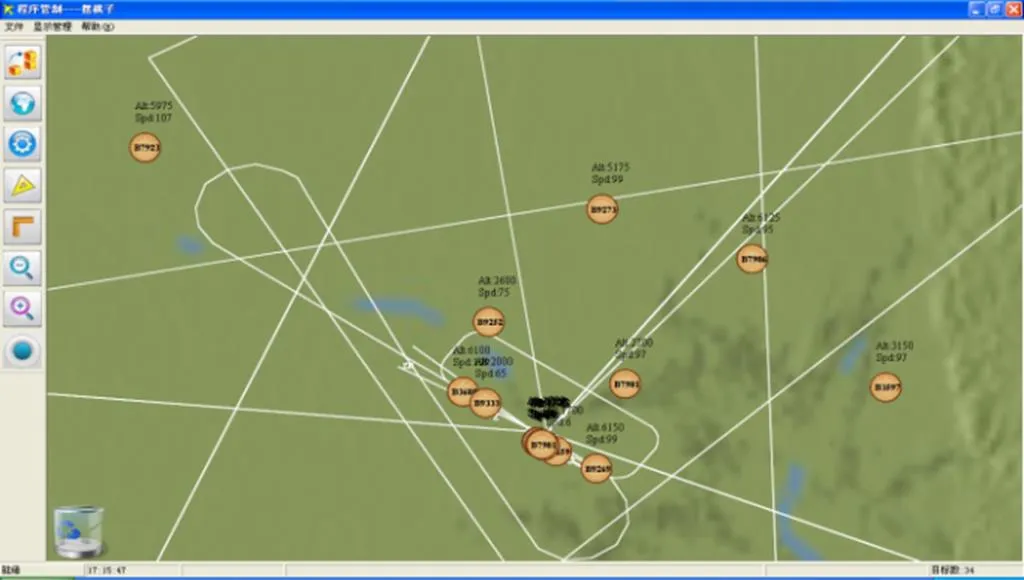
图4 ADS-B监视和程序管制测试效果图
4 结束语
随着信息化技术的发展,许多传统的工作方式都可以通过计算机替代。本文通过计算机可视化技术实现了ADS-B监视与程序管制的融合处理,并开发了人机交互处理软件,该软件在没有ADS-B监视数据时,可以作为独立的程序指挥系统,否则就是ADS-B监视系统的备份。该软件不仅可以实际应用,而且也可以作为管制员培训时的实践工具。以后的工作就是完善并提高该系统的自动化程度,增加语音识别技术和程序管制评估等功能,使该软件更好地满足管制员的工作需求。
[1]陆琴谦,于婷婷.民航高校空中交通管制模拟机教学探析[J].江苏航空,2013,126(1):48-50.
[2]RTCA DO-260B,Minimum Operational Performance Standards for 1090 MHz Extended Squitter Automatic Dependent Surveillance–Broadcast(ADS-B)and Traffic Information Services – Broadcast(TIS-B).
[3]康东祥,荣朴.典型考核方法在程序管制模拟训练中的应用[J]. 科技资讯,2015,182(12):206-207.
[4]张晓燕,马江涛.ATC3 在管制员模拟培训中的应用分析[J].中国民航大学学报,2013,31(3):27-30.
[5]RTCA.Minimum Aviation System Performance Standards for Automatic Dependent Surveillance Broadcast(ADS-B). DO-242A. June 25,2002.
[6]杨珊,时宏伟.Asterix Category 021 协议的应用与分析[J].电讯技术,2011,51(10):132-136.
[7]RTCA. Minimum Operational Performance Standards for Universal Access Transceiver(UAT)Automatic Dependent Surveillance-Broadcast(ADS-B).DO-282B. December 2,2009.
[8]赵泽荣.基于vxWorks的UAT机载报文编码实现[J].控制工程,2016,23(6):944-948.
猜你喜欢
新传奇(2022年37期)2022-10-22
北京航空航天大学学报(2021年6期)2021-07-20
当代陕西(2020年13期)2020-08-24
流行色(2019年7期)2019-09-27
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
新商务周刊(2018年15期)2018-12-06
科技与创新(2018年11期)2018-11-29
创新作文(1-2年级)(2017年4期)2017-09-22
航空知识(2017年2期)2017-03-17