
多光谱大幅宽光学遥感卫星的热设计及验证
2020-05-10 07:51王子辰
光学精密工程 2020年4期
李 强,孔 林,2*,张 雷,2,3,王子辰
(1.长光卫星技术有限公司,吉林 长春 130033;2.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;3.中国科学院大学,北京 100039;4.上海质量监督检验技术研究院,上海 200233)
1 引 言
低成本、轻量化光学遥感卫星近来愈发受到国内外航天院所、高校以及卫星技术公司的关注和青睐。尤其在商业航天领域,研发成本及周期的限制使得商业遥感卫星技术向小型化、高性能以及批量化研制方向发展,以满足商业卫星快速组网的需求。近年来,随着“商业航天+互联网”的跨界融合以及商业资本的不断涌入,很多商业遥感卫星公司应运而生[1-2]。美国美丽大地(Terra Bella)公司(原天空盒子成像(Skybox Imaging)公司)的“天空卫星”系列,于2013年11月发射首颗卫星SkySat-1,实现了微卫星优于1 m分辨率的光学成像以及1 m级视频成像[3]。美国行星(Planet)公司(原行星试验(Planet Labs)公司)的鸽群(Flock)系列纳卫星实现了3~5 m分辨率成像,并在2015年6月实现了20颗卫星同时在轨[4]。国内的商业卫星公司也顺势而起,不断涌现。以长光卫星技术有限公司为代表的“吉林一号”系列星座目前已实现13颗卫星在轨,并计划于2030年完成星座在轨卫星数量138颗,实现全球任意点10 min以内重访能力。
2019年1月,吉林一号系列两颗光学遥感卫星成功入轨,卫星平台搭载2台PMS相机、1台SWIR(短波红外)相机、1台MWIR(中波红外)相机以及2台LWIR(长波红外)相机。PMS相机具备多谱段、大幅宽的特点,相机共设置19个可见光及近红外谱段,空间分辨率5 m,幅宽110 km,区域覆盖性及成像效率好。4台红外小相机配合2个主载荷相机实现了0.4~13.5 μm全谱段成像能力,并具备较高的光谱分辨率。卫星将在林区遥感监测、林火预警、海洋生态监测以及海上搜救应急等方面发挥重要作用。
该光学遥感卫星光学载荷多且温控要求严格、卫星平台大功率密度单机布局紧凑,星体结构导热性能差,给相机组件及单机的温度控制增添了难度。同时,受商业遥感卫星研制成本及星上能源的研制,该卫星热控分系统不具备充足的主动热控资源,如何利用有限资源完成多个光学载荷、平台单机以及重要承力结构的温度控制成为热控分系统挑战。以往针对该量级光学载荷及卫星平台的热设计通常采用饱和式散热面搭配温度补偿的方式,这种热控方式虽能较为精确以及稳定地控制组件温度水平,但也浪费掉了不少资源[5-6]。
该卫星热控分系统实现了多个光学载荷集成热管理及热控资源均衡分配,根据各光学载荷的热控需求,实现密集光学载荷间的热解耦,并对有限热控资源进行合理分配,实现各光学载荷的温度控制;首次实现新型柔性高导热率材料PGS在卫星平台单机散热方面的在轨利用,避免了轻量化、结构紧凑卫星采用传统刚性热管带来的增重及安装困难问题;卫星热控分系统从正样设计、实施、试验再到在轨验证全流程仅用不到8个月,快速实现了卫星在轨热分析模型修正,为后续同类型批产卫星热控设计提供了一种高效、可行的设计思路。
2 卫星结构及热控需求分析
2.1 卫星光学载荷及平台结构布局
卫星2台光学主载荷相机通过柔性支腿与相机安装板连接,短波红外相机通过支架安装在相机安装板+Y侧,中波红外相机通过支架安装在相机安装板-X侧,2台长波红外相机通过支架安装在-X向支撑板上,辨云相机通过支架安装在相机安装板-Y侧。光学载荷布局(支架省略)如图1所示。
卫星平台+Y向仪器舱单机有锂离子蓄电池、电源控制器、中心机、三轴光纤陀螺、成像处理箱、测控答应机以及飞轮组件等。
2.2 外热流分析
卫星所处500多公里太阳同步轨道,轨道倾角100°左右,降交点地方时12点。根据卫星飞行轨道参数,计算了卫星在对日定向姿态下(长期模式),冬至及夏至时刻卫星外表面上所到达外热流(太阳辐射、地球反照、地球红外辐射)的轨道平均热流密度,如表1所示。
根据外热流计算结果可以看出:+X方向由于太阳直射的影响外热流数值较大,不宜作为散热面,其余面热流均较小,可作为散热面。根据整星结构布局以及大功耗单机分布,将整星散热面设置在+Y及-Y面的蒙皮上。

表1 到达卫星各表面的平均外热流密度
2.3 热控需求分析
该卫星光学载荷多且集中,主载荷相机为离轴三反式Cook型结构,同时装配了调焦机构及定标机构,相机结构复杂并与热控耦合较多;3个星敏感器安装在主载荷相机承力筒上,5台光学小相机分布在两台主载荷相机周围,所有光学载荷布局紧凑。热控分系统需要在保证光学相机温度水平的同时,还需防止主载荷相机内部、光学载荷之间多层隔热组件表面对相机成像产生杂光影响。
卫星平台采用轻量化结构设计,出于减震考虑在部分舱板之间安装了减震器,使平台结构间导热性能变差;同时卫星单机功耗分布不均匀,大功耗单机相对集中在一个单机舱内,与体贴帆板紧邻舱段密闭内部温度较高导致内部单机散热困难。热控分系统需要合理设计散热面及导热措施,保证舱内全部单机温度在合理范围内。
利用有限热控资源,采取主、被动热控相结合的方式,全部光学载荷与卫星平台隔热安装,对主载荷相机各组件、相机安装板以及平台蓄电池采取主动热控措施保证温度可控,对5台光学小相机、平台单机及结构采取被动热控措施维持温度水平。
3 卫星主要热设计及热分析计算
3.1 光学主载荷热设计
温度是影响光学相机成像质量的重要因素,光学反射镜的温度变化会导致相机离焦[7],因此需通过主动热控的方式控制光学反射镜及承力结构的温度变化。
该光学主载荷相机反射镜采用辐射式主动热控的方式,将反射镜控温加热器粘贴到反射镜背部的多层隔热组件,有效降低控温超调等对反射镜温度的影响,增强其温度稳定性。反射镜主动热控示意图如图2所示。
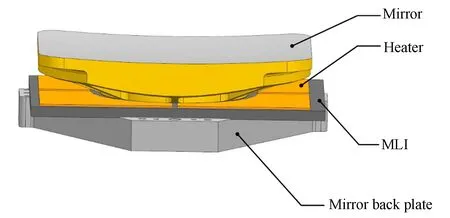
图2 反射镜辐射式主动控温示意图Fig.2 Sketch of radiant active temperature control for mirrors

图3 分层隔热示意图Fig.3 Sketch of layer heat insulation
主载荷相机承力筒为钛合金结构,导热率较小,利用在承力筒外表粘贴柔性导热石墨膜降低其在轨温度梯度;承力筒内外表面均包覆一定单元数的多层隔热组件,减小外部低温环境对承力筒温度的影响。同时承力筒上多个遮光罩、后罩及挡光光阑均与承力筒隔热安装,如图3所示,并采用多个隔热垫分层隔热的方式,增强隔热效果。
承力筒设置3个主动控温加热区,加热片贴在承力筒内表面上,加热片形状及分布根据承力筒的结构及温度分布进行优化设计,加热片分布如图4所示。通过严格的隔热设计以及加热区合理的优化,保证钛合金结构的承力筒各部分温差优于2 ℃。
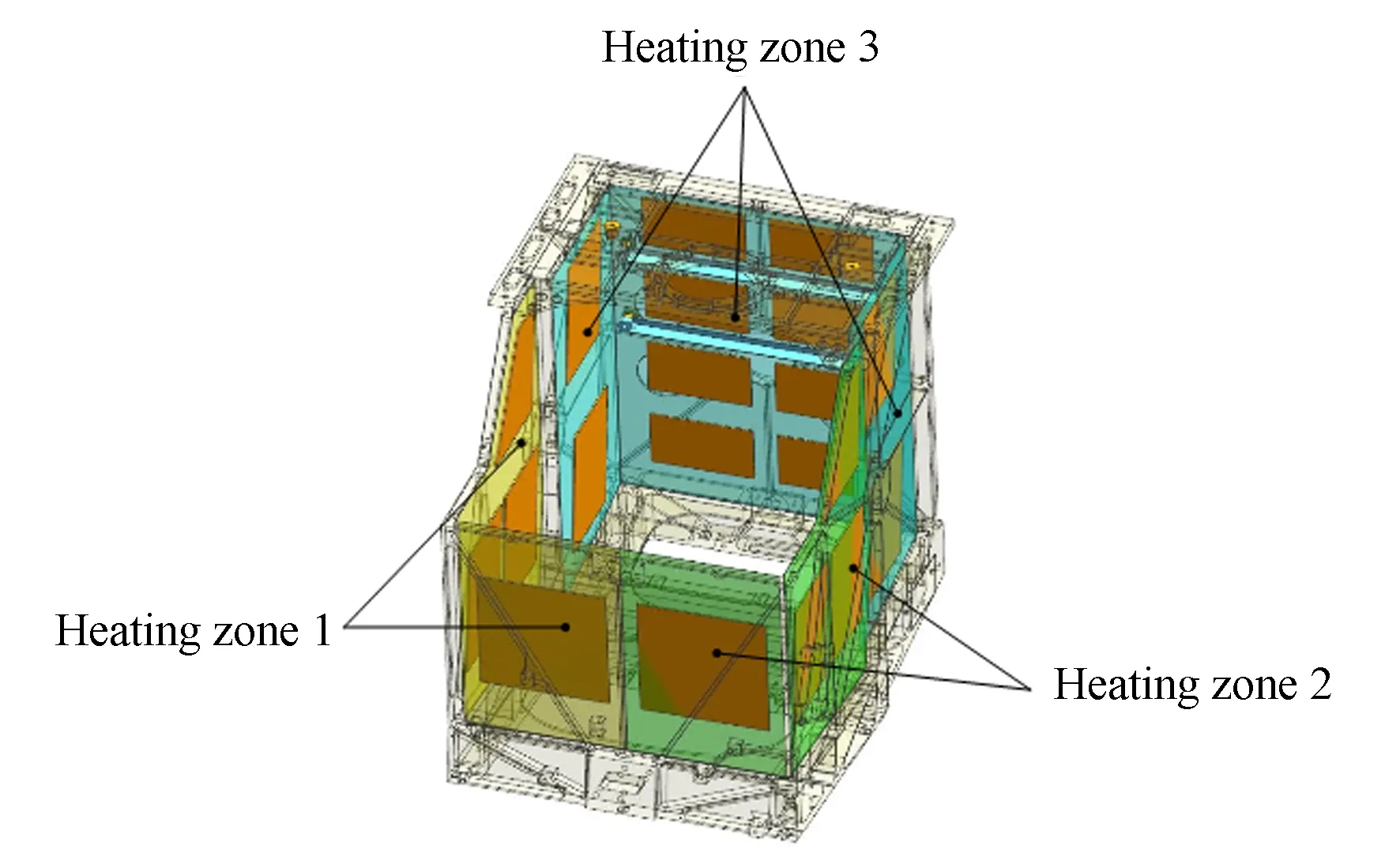
图4 承力筒主动热控示意图Fig.4 Sketch of bearing cylinder′s active thermal control
3.2 其他光学载荷热设计
4个光学红外相机和1个辨云相机通过支架与相机安装板相连,3个星敏感器通过支架与主载荷相机承力筒相连,各光学载荷支架与安装面通过聚酰亚胺材料隔热安装,实现各光学载荷间的热解耦。对3个星敏感器支架进行主动控温,并将3个加热回路的热控功耗分配给5台小相机支架,实现热控功耗的合理利用。5台小相机本体均采用被动热控的方式进行热设计,保持红外及辨云相机在轨处于较低的温度水平,相机地面装调和热光学试验根据仿真分析温度结果进行,在地面装调时预留好相机入轨后因温度变化产生的离焦量。
3.3 卫星平台热设计
卫星平台+Y舱常开及大功耗单机相对集中,整个+Y向蒙皮开设了散热面,面积约0.35 m2;而-Y舱常开单机较少,-Y向蒙皮开设部分散热面,面积约0.1 m2;+X舱安装有成像处理箱及中心计算机,瞬时功耗分别为90 W和97 W,在+X向舱板左上靠近成像处理箱位置开设300 mm×200 mm大小的散热面,将同舱的锂离子蓄电池与舱板隔热安装,同时包覆20单元多层隔热组件,隔绝周围环境的热影响。整星散热面如图5所示。

图5 卫星散热面简图Fig.5 Scheme of satellite radiating surfaces
-X舱紧邻帆板,舱内常开单机受帆板温度影响较大,同时-X舱为密闭狭小舱段,热量无法有效排散,导致单机温度过高。利用一种新型高导热率材料PGS(Pyrolytic Graphite Sheet),增强单机与舱板,舱板与散热面间的导热,该新型材料具有柔性好、导热率高以及低密度等特点,近年来普遍被应用于航天器的导热增强设计中[8-9]。建立PGS材料导热模型简图如图6所示,其各部分热阻计算公式如式(1)~式(3)所示:

图6 PGS材料导热模型简图Fig.6 Sketch of PGS heat conduction model
(1)
(2)
(3)
其中:RO1为物体1与PGS材料的接触热阻,K1为物体1(Object 1)与PGS材料间的接触换热系数,A1为物体1与PGS材料的接触面积;RP为PGS材料的导热热阻,δ为PGS材料热传导方向上的有效长度,λ为PGS材料的导热率,A2为PGS材料的导热截面面积;RO2为PGS材料与物体2(Object 2)的接触热阻,K2为物体2与PGS材料间的接触换热系数,A2为物体2与PGS材料的接触面积。假设两个物体温度均匀且与外界绝热,且PGS与两物体接触面温度均匀,当温度稳定后,物体1的温度为T1,物体2的温度为T2,且T1>T2,可以得出物体1与物体2之间的单位面积上的换热量为:
(4)
当两物体最终温度维持在T1,T2不变且PGS材料长度及与两物体接触面积不变时,公式(4)中单位面积的换热量q仅与PGS材料的总厚度d有关,即PGS材料叠加的层数约多,换热量越大。当然,在实际应用时还要考虑PGS材料层数增多带来的柔性下降及实施难度增加,合理设计PGS材料叠加层数。

图7 -X舱单机散热路径Fig.7 Sketch of radiant active temperature control for units
利用PGS材料在单机与周围舱板、舱板与散热面之间建立传热路径,保证接触面积同时增加PGS材料层数。这样,该单机的全部散热路径如图7所示,通过新型导热材料建立了2条新的散热路径(图中右侧两条散热路径),与原来的2条散热路径(图中左侧两条散热路径)组合在一起,有效降低单机温度。
如图7所示,传热路径中实线代表导热路径,虚线代表辐射路径。Rcti代表两个对象间的接触导热热阻,与接触导热系数及接触面积有关;Rci代表物体本身的导热热阻,与材料导热率、导热截面积以及热量传递方向长度有关;Ri代表物体表面辐射热阻,与物体表面的红外发射率及物体有效辐射面积有关;Ri-j代表空间辐射热阻,与物体有效辐射面积及和另一物体表面间的视角系数有关[10]。
3.4 热分析计算
根据以上热设计方案,利用有限元热分析软件对该卫星建立热分析模型如图8所示。卫星构件多为薄板结构,故将其划分为壳单元,单元厚度按照体积等效厚度计算,采用热耦合方式对模型进行简化,共建立了286个热耦合,手动划分了7 875个壳单元。

图8 卫星热分析模型Fig.8 Thermal analytic model of satellite
建立热分析模型时,忽略卫星电连接器、电缆线、设备安装螺钉等细节特征,卫星全部表面构成封闭体,去掉设备安装板或舱板上的小孔,使得辐射角系数归一性得到满足。不考虑仪器安装板间的接触导热,舱内单机按照等效质量的原则简化成规则的六面体或者圆柱体,热耗均匀分布在壳体表面。
仿真计算中根据卫星在长期模式下卫星姿态、太阳常数、多层面膜及散热面涂层表面属性、帆板光电转化效率、卫星舱内单机功耗,定义高温、低温两个极端工况如下:
高温工况:
(a)太阳常数取最大值1 414 W/m2;
(b)多层面膜聚酰亚胺单面镀铝二次表面镜按末期属性计算,性能参数为αs/ε=0.64/0.69;
(c)散热面白漆按非对日面寿命末期计算,性能参数为αs/ε=0.3/0.86;
(d)帆板电池片按最小光电转化效率计算,帆板对日面等效辐射特性参数为αs/ε=0.915/0.82;
(e)按一轨成像、一轨数传工作,各单机按功耗最大配置;
(f)主动热控工作(要求满足工作温度指标)。
低温工况:
(a)太阳常数取最大值1 322 W/m2;
(b)多层面膜聚酰亚胺单面镀铝二次表面镜按初期属性计算,性能参数为αs/ε=0.36/0.69;
(c)散热面白漆按初期属性计算,性能参数为αs/ε=0.17/0.86;
(d)帆板电池片按最大光电转化效率计算,帆板对日面等效辐射特性参数为αs/ε=0.775/0.82;
(e)相机、数传不工作,各单机按功耗最小配置;
(f)主动热控工作(要求满足工作温度指标)。
卫星主载荷相机、光学小相机、部分平台单机热分析结果如表2所示。高、低温工况下某时刻主承力筒温度云图如图9所示。

表2 卫星热分析结果
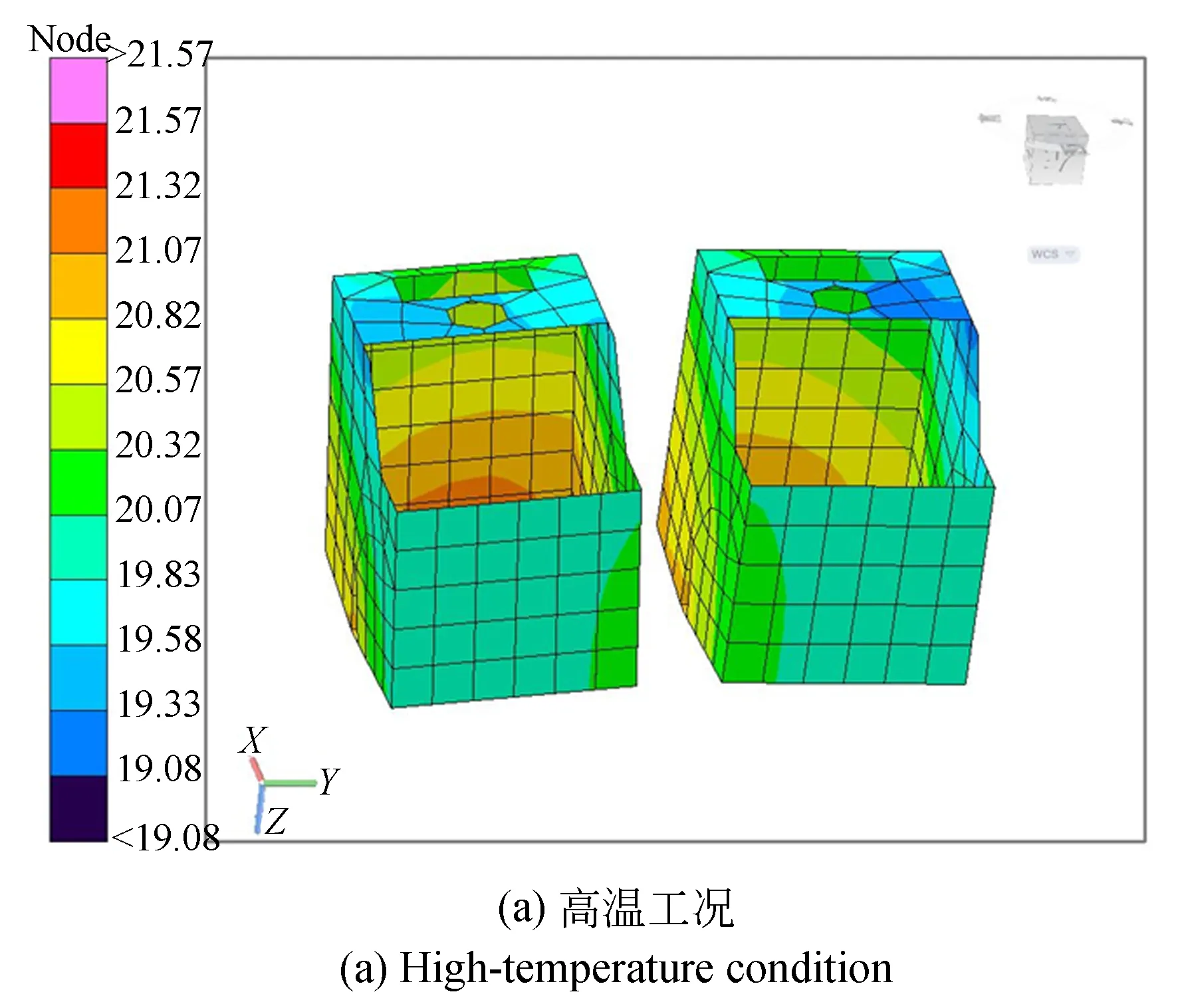
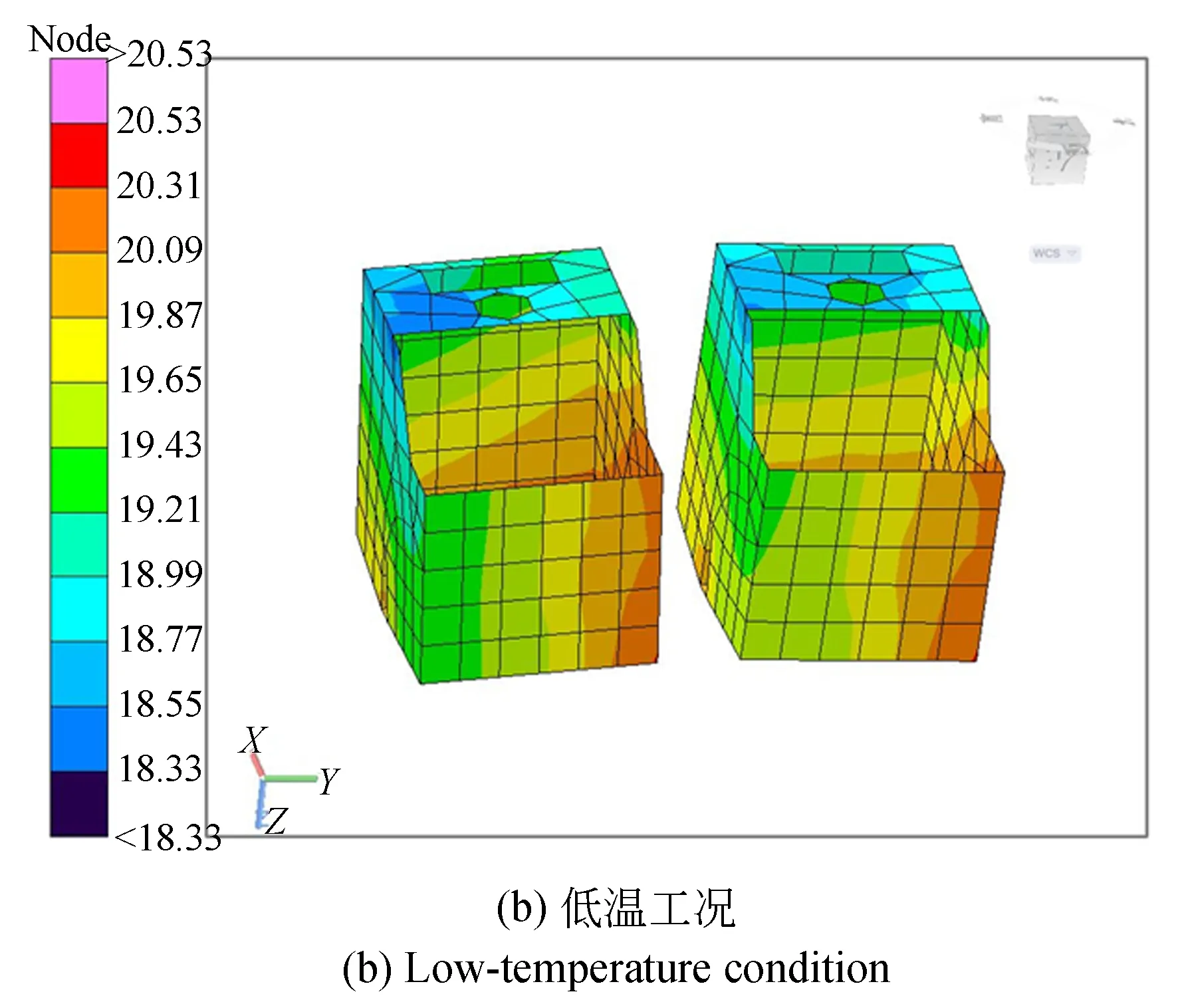
图9 高、低温工况相机承力筒温度云图Fig.9 Temperature nephogram of bearing cylinder on high/low temperature condition
从表2的计算结果看出,高、低温工况下,各主载荷相机组件均满足控温要求;平台单机中,安装在帆板后面的测控答应机最高温度为35.2 ℃,较未做散热措施的44.3 ℃降低了近9 ℃。从图9承力筒温度云图可以看出,承力筒在高低温工况下各区域温差小于2.5 ℃,说明针对承力筒的增强导热措施效果明显。
4 热平衡试验
对两颗正样卫星开展热平衡试验,考察卫星在真空以及模拟轨道热环境下的温度水平,验证热设计的正确性和可行性,以及热分析计算的准确性。
4.1 试验方案
该光学遥感卫星的热平衡试验利用空间环境模拟器模拟卫星所处冷黑和真空环境,利用红外加热笼模拟卫星各表面到达外热流,试验中体贴帆板采用模拟件,通过在其表面粘贴电加热器模拟体贴帆板等效热流。试验中,卫星各表面到达外热流按照轨道平均外热流施加,体贴帆板等效热流按照瞬态施加。其他试验装置包括温度测控系统、综合仿真设备、电源系统等,试验装置组成、两个颗卫星在真空罐内的状态如图10(a)所示,试验现场如图10(b)所示。
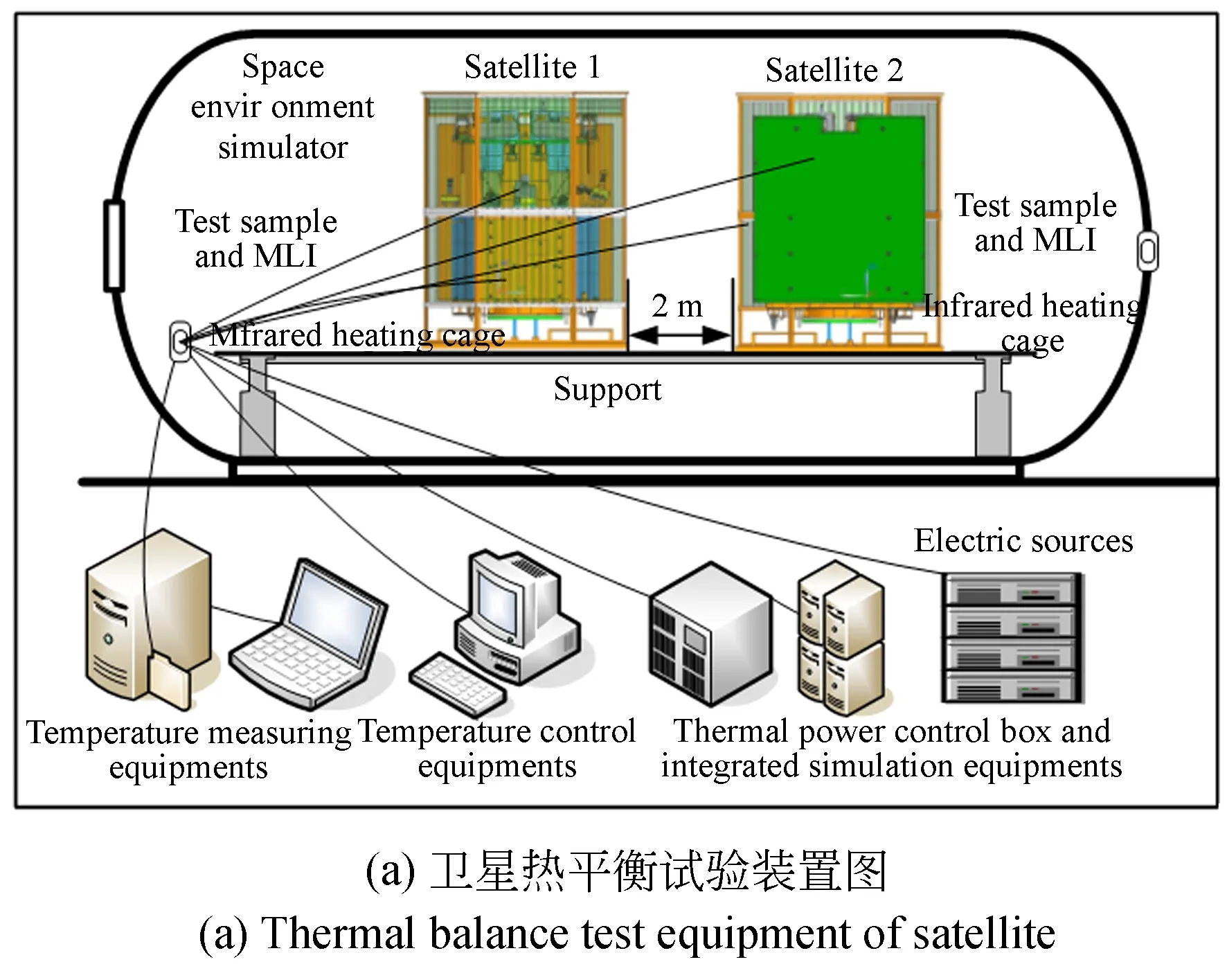
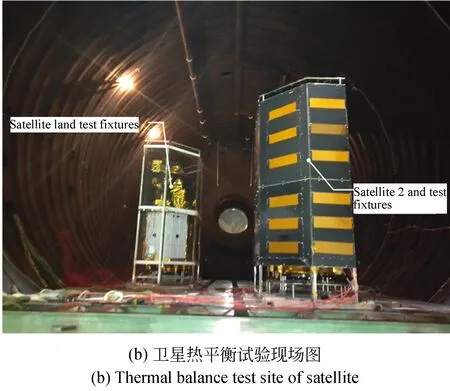
图10 热平衡试验装置及现场Fig.10 Thermal balance test equipment and site
4.2 试验结果
热平衡试验将卫星所受最大、最小外热流及单机功耗作为热平衡试验的高、低温工况输入条件,以01星为例,高、低温工况相机各组件试验温度曲线如图11所示,卫星平台主要单机温度曲线如图12所示。
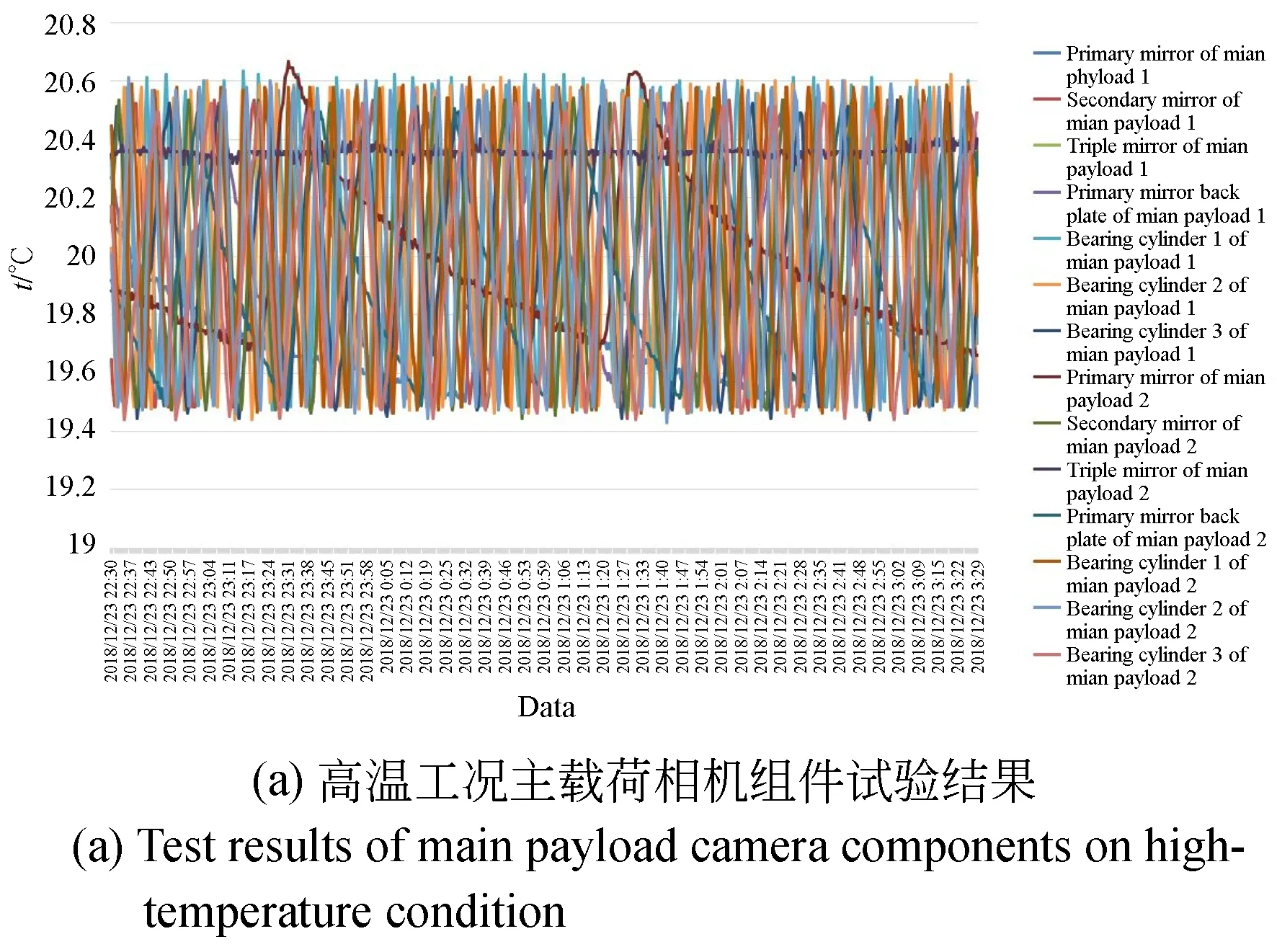
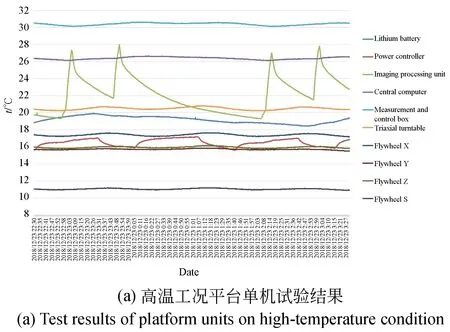
从图11及图12中相机组件和平台主要单机热平衡试验结果来看,高、低温工况下,相机各组件温度在19.4~20.6 ℃之间,平台主要单机温度在7.0~32.0 ℃之间,满足控温要求且有一定的设计裕量,与热分析结果基本一致,表明针对卫星各组件的热设计正确可行,热分析结果准确可靠。
5 在轨验证
两颗光学遥感卫星于2019年1月22日在酒泉卫星发射中心发射,发射入轨后卫星热控分系统各项功能正常,舱内外单机温度处于合理水平。对卫星各组件温度进行入轨3个月的在轨测试,相机组件及平台主要单机在轨温度如图13所示。卫星各组件在轨温度与热分析、热试验温度对比结果如表3所示。
由图表中的结果可以看出,主载荷相机组件在轨温度波动不大于(20±0.3)℃,优于热分析及热平衡试验结果;4台小相机在轨温度处于热分析及热试验温度范围内,热分析和热试验对其在轨温度进行了准确预示;平台单机温度在9~30 ℃之间,测控答应机最高温度29.5 ℃,针对其的散热设计效果明显。总体来看,在轨温度与热分析及热试验结果偏差在±3 ℃以内。

表3 卫星在轨温度与热分析、热试验结果对比
Tab.3 Temperature and thermal analysis/test comparison of satellite on orbit (℃)

6 结 论
本文对针对多光谱、大宽幅光学遥感卫星光学载荷多热控资源少、平台单机功耗不均且轻量化结构导热困难等特点,分别对主载荷相机、光学小相机以及卫星平台进行热控设计,并通过热分析及热试验进行验证。
对主载荷相机,采用隔绝冷源、优化承力结构导热性能以及合理布置加热区等方式进行热设计,实现在轨温度(20±0.3)℃的波动;对5个小相机及3个星敏感器及2个主载荷相机进行热解耦和集成热管理,并通过热分析及热试验结果评估相机在轨温度环境。在轨结果显示,评估效果准确,各相机温度均在评估温度范围内;对卫星平台进行散热面位置优化、利用PGS材料增强单机散热效果,降低测控答应机温度近15 ℃,有效解决了密闭、狭窄舱段单机的散热问题。
在轨遥测数据显示:主载荷相机温度控制在19.7~20.3 ℃之间,光学小载荷温度控制在-31.2~6.6 ℃之间,舱内单机温度在9.7~29.5 ℃之间。各温度结果均满足热控指标要求,在轨数据与热分析及热试验结果偏差小于±3 ℃。说明针对该光学遥感卫星低成本、轻量化的热控设计正确合理,并为同类型商业组网卫星的热控设计提供的参考和借鉴。
猜你喜欢
新教育时代电子杂志(教师版)(2022年31期)2022-02-09
新疆钢铁(2021年1期)2021-10-14
军民两用技术与产品(2021年10期)2021-03-16
航天工业管理(2019年11期)2019-04-20
能源(2017年9期)2017-10-18
空间控制技术与应用(2015年4期)2015-06-05
航天返回与遥感(2014年4期)2014-07-31
筑路机械与施工机械化(2014年10期)2014-03-01
国际太空(2012年11期)2012-08-14
国际太空(2012年11期)2012-08-13
