实时预测FPSO与穿梭油船位置的方法
2020-04-30 07:06
船海工程 2020年1期
(中海油能源发展采油服务公司,天津 300452)
FPSO的储油能力一般为3 d(北大西洋Foinhaven油田)到11 d(中国南海流花油田)的产量[1]。对于离陆岸较远的海上油田,利用管线输送的技术性和经济性都不可接受,故普遍采用穿梭油船运输[2]。在FPSO串靠外输作业中,穿梭油船没有动力输出,仅依靠拖船通过拖缆牵引穿梭油船,穿梭油船通过系泊大缆连接于FPSO的艉部或艏部,拖船通过拖缆调整FPSO与穿梭油船的相对位置关系,将拖轮、穿梭油船停靠在与FPSO呈直线状态是处于安全状态[3]。以15万t级FPSO为例,其与穿梭油船总长均在200 m之上,连接2艘船的系泊大缆仅有60~90 m,在一次长达约22 h的原油外输作业中风浪流变化莫测。常规操作是当观测到FPSO和穿梭油船之间相互夹角或相对距离或系泊大缆拉力达到警戒值时,拖船再拖曳穿梭油船,但常常来不及调整二者的相对位置,因而时常发生碰撞。已有研究强调FPSO原油外输作业时人机交互的复杂性,指出努力增加作业时间窗口和降低操作者反应时间是提高作业安全的重要准则[4]。
由于受到风速风向、浪高浪向、流速流向、系泊缆拉力和拖缆拉力、FPSO及穿梭油船装载变化等多因素影响[5],采用多浮体水动力计算模型来预测船体运动位置,运算所需时间较长,难以满足实时计算的要求。有学者提出:先模拟计算多因素下的船体运动坐标,构建模拟数据库;再用实时监测的数据近似匹配模拟数据库,实现实时预测船体运动坐标[6]。但这种方法预测准确度不够理想,费效比不佳。因此,提出一种基于最小二乘法原理对实时监测船舶的高精度卫星定位数据进行数值拟合,再利用回归方程计算出未来短时间内船舶位置的方法。
1 FPSO串靠外输风险分析
据统计[7],1995—2013年,英国和挪威在北海海域进行了8 702次外输作业,共发生28次有记录外输事故,其中外输油期间有19次,事故类型主要为FPSO与穿梭油船发生碰撞、2船大角度偏移、外输软管原油泄漏。而国内FPSO串靠外输作业中常发生事故有FPSO与提油船发生擦划或碰撞挤压、2船大角度偏移、系泊大缆破损等,外输作业典型事故案例见表1。
分析国内外FPSO串靠外输事故可知,串靠外输作业风险产生的客观原因:1次外输作业时间长,天气、海况突变恶劣,监测数据分散于不同设备,船舶定位精度低;主观原因:人员夜间作业易疲劳导致监控不连续,系泊船长靠个人经验指挥且指挥时效性差。

表1 中国 FPSO串靠外输典型事故案例
为了解决系泊船长提油作业时缺少实时参考依据的问题,需设计的系统不仅要实时监测FPSO、穿梭油船和拖船的位置,而且能较高精度预测一段时间内FPSO与穿梭油船相对位置,从而降低系泊船长反应时间和增加拖船作业时间窗口,实现从源头上消除安全隐患。
2 船舶方位计算方法
2.1 2船距离的计算
大地坐标系是以大地经度L、大地纬度B和大地高度H来呈现空间任1点的位置。空间直角坐标系的原点选取椭球中心点O,X轴选取赤道面EW和起始子午面N'GS'的交线,Y轴选取赤道面EW上和X轴正交的方向,Z轴选取椭球的短轴且Z轴以向北为正,从而形成右手空间直角坐标系OXYZ。测站点I的法线交椭球面于P点,N′PS′为I的子午面,见图1。

图1 测站点在椭球体空间直角坐标系中位置示意
对于同一椭球,地面上任1点的空间直角坐标与相应的大地坐标的关系[8]为
(1)
见图1,大地站心空间直角坐标系的坐标原点为测站点I,x轴选取大地地平面和大地平行圈的交线,y轴选取大地地平面和大地子午线北端的交线,z轴选取测站点I在椭球体的法线方向。
针对以测站点I为原点的大地站心空间直角坐标系,假设任意点J的坐标为(xj,yj,zj),而I,J两点在以椭球为原点的空间直角系中的坐标为(Xi,Yi,Zi)和(Xj,Yj,Zj),则有关系式

(2)
由GPS接收机易得椭球上任意一点的大地纬度B、大地经度L和大地高度H,代入公式(1)计算出(Xi,Yi,Zi)和(Xj,Yj,Zj),再代入公式(2)计算出(xj,yj,zj),则有I,J两点间的空间距离Sij与J点在以原点为I的大地站心空间直角坐标系中的坐标(xj,yj,zj)之间的关系为
(3)
2.2 2船夹角的计算
由GPS接收机易得FPSO和穿梭油船的航向角分别为AF,AS,(°),航向角为船体相对正北方向的角度,易得FPSO与穿梭油船之间相对夹角AFS为
AFS=|AF-AS|
(4)
3 模型建立
3.1 最小二乘法拟合原理
假设测量得到一组数据为(xi,yi)(i=1,2,…,m)及每个点的权系数为ai,则有函数关系y=f(x,a)。f(x,a)基于最小二乘法在某种准则下与所有实测数据点最为接近,其误差平方和最小[9-10]。
3.2 预测船舶位置的数学模型
通过分析船舶定位点,预测船舶的运动位置,可分解为估算出船舶在未来时刻的经度、纬度和航向。基于最小二乘法数值拟合原理,船舶的各定位数据分别与时间t建立函数关系。
式中:t为外输进行时间,s;A为船舶航向在90 s内的变化量,();a1,a2和a3为待定系数;f(t)为适用以下条件的因变量,船舶经度f(t1)、船舶纬度f(t2)和船舶航向角f(t3),()。
实时拟合计算船舶过去过去一段时间内的定位点数据——经度、纬度和艏向角,并求出待定系数a1,a2和a3,分别得到船舶经度f(t1)、船舶纬度f(t2)和船舶航向角f(t3)随时间变化的线性回归方程。根据这些线性回归方程,模拟计算出船舶未来一段时间内的经度、纬度和航向,并在电子海图上显示预测的船舶方位信息。
4 算法海上验证测试
基于船舶位置预测数学模型开发软件系统并将其安装于南海海洋石油111 FPSO的服务器。系统通过数传电台实时接收GPS组块监测的FPSO和穿梭油船的经度、纬度和航向等定位数据,再经过软件系统实时计算,外推出一段时间之后FPSO和穿梭油船的经度、纬度和航向,并以实线船型图标、虚线船型图标分别动态呈现FPSO和穿梭油船当前及一段时间之后位置关系,软件系统主界面见图2。
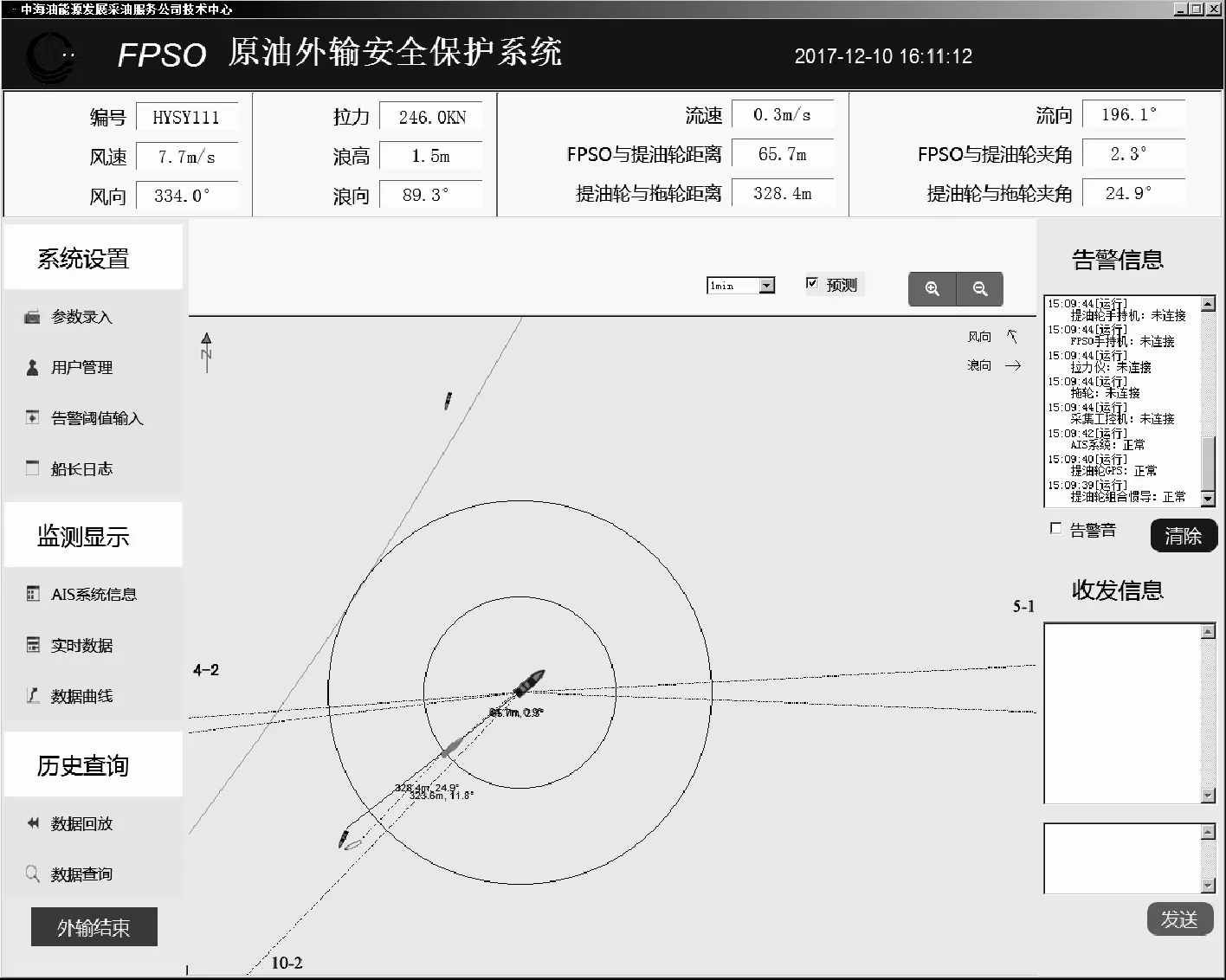
图2 软件系统主界面
系统应用测试的环境条件:风速≤11 m/s,浪高≤2.5 m,流速≤1 m/s。选取1次外输作业中的850组数据作为研究对象。经统计分析,得到FPSO和穿梭油船的经度、纬度和航向角的预测精度情况,见表2。

表2 FPSO和穿梭油船的经度、纬度和航向的预测精度
由表2知,先分别计算出FPSO和穿梭油船在外推1、5和10 min的纬度、经度和航向的预测值,再借助GPS组块测出对应外推时间的实际值,对预测值和实测值的差值取绝对值,最后分别统计出预测经度偏差小于5 m,预测纬度偏差小于5 m,预测航向偏差小于4°在850组数据中的所占百分比。结果表明,采用此船舶位置数学模型预测FPSO和穿梭油船的经度、纬度和航向,外推1 min时预测精度范围为86%~95%,外推5 min时预测精度范围为64%~76%,外推10 min时预测精度范围为31%~38%。可见,外推时间越短,预测精度越高,外推60 s数据具有工程应用价值。
基于外推60s时FPSO和穿梭油船的经度、纬度和航向的预测值和实测值,采用公式(3)和(4)可计算出FPSO和穿梭油船之间相对距离和相对夹角的预测值和实际值,再利用MATLAB软件绘制出外推60 s时FPSO和穿梭油船之间相对距离和相对夹角的预测值与实测值对比见图3。
统计结果表明,外推60 s时FPSO与穿梭油船的预测距离误差≤8 m,其中91%预测距离误差≤5 m;FPSO与穿梭油船的预测夹角误差≤10°,其中89%预测夹角误差≤5°,因此,船舶位置预测模型在外推60 s时具有较高的预测精度,可满足现场应用要求。

图3 FPSO与穿梭油船预测值与实测值对比
FPSO与穿梭油船的相对距离越小或相对夹角越大,FPSO与穿梭油船发生碰撞的风险越大。系泊船长根据本系统预测的船舶位置信息,提前采取对应措施,使FPSO与穿梭油船的相对距离和相对夹角处于安全范围内,可确保提油作业在较恶劣环境条件下顺利进行。
5 结论
1)基于GPS差分定位数据和最小二乘法原理提出预测船舶位置的方法,相较于以往预测船舶位置方法优点在于外推较短时间时实现更高的预测精度。
2)预测船舶位置的数学模型是对监测船舶的卫星定位数据总结得到的经验公式,当外推时间超过5 min时,船舶位置预测精度较低。应考虑结合水动力学算法进行修正,用于提高外推较长时间时船舶位置的预测精度。
猜你喜欢
船海工程(2021年1期)2021-03-02
船舶(2021年1期)2021-03-01
学校教育研究(2019年21期)2019-11-11
广东造船(2018年4期)2018-10-09
中国水运(2018年1期)2018-01-27
科技经济市场(2017年2期)2017-05-22
广东造船(2016年1期)2016-03-02
中国水运(2015年5期)2015-07-13
地理教育(2009年3期)2009-06-19
中学政史地·初中(2009年11期)2009-01-05