多功能水体环境监测水面无人艇的设计
2020-04-30 07:06
船海工程 2020年1期
(湖北三江船艇科技有限公司,湖北 孝感 432100)
传统的水体环境监测工作通常采用以下方法:①定点布放监测设备并人工定期采集数据;②乘坐水上交通工具并携带监测设备对水域中的某些特定点进行测量。这2种方式都存在工作效率低、实时性差、人工成本高、无法对不适宜人员进出的水域进行监测的缺点。为此,设计在多功能水体环境监测水面无人艇,以体积小、重量轻、操作便捷、维护和系统扩展方便为原则,从总体布置、船体结构、无人控制系统等方面开展设计、生产工作,并通过实际水域试验对该无人艇的基本性能[1-2]以及自主航行、自动避障、水质采样与监测、水体表观光谱观测等功能进行验证。
1 总体技术指标
该无人艇总体技术指标见表1。
2 艇体结构
采用单体船型,相较于双体船型,可提供更大的舱室空间,以搭载相关系统和设备。
如图1所示,艏部甲板设置4G摄像机和避障传感器,舯后安装天线支架,气象传感器、天线、电动绞车均置于支架上;艉部设置1台2 kW的电动舷外机作为推进动力,1台直线电动推杆作为舵机执行器;用于固定水体表观光谱观测设备浮体的托架以预埋连接的方式固定于艉封板上,强度可靠、水密性好;水质采样探头和水质监测传感器探头以防水螺母锁定在固定于艉封板的支架上,水密良好。
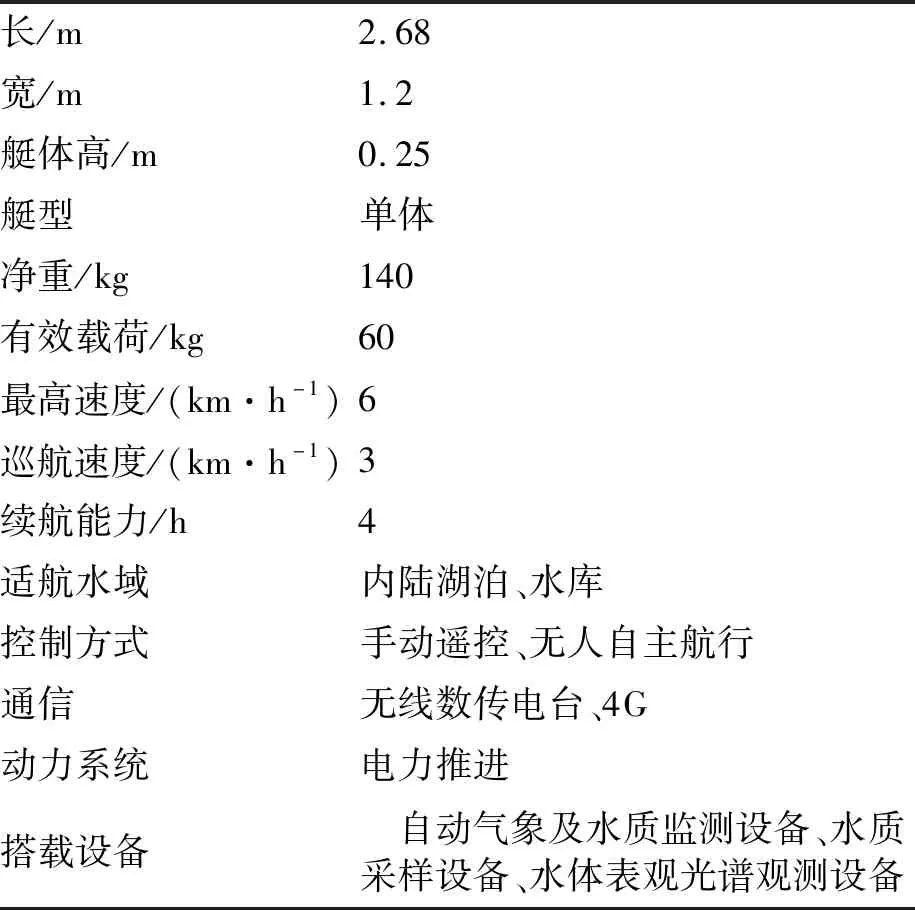
表1 多功能水体环境监测水面无人艇技术指标
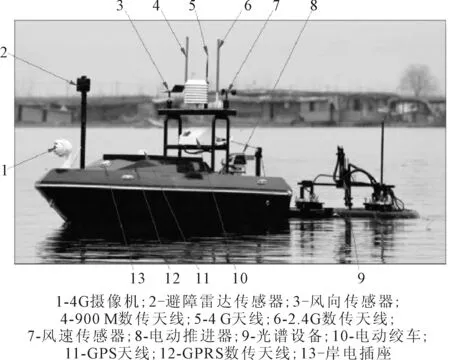
图1 主要设备布置说明
一组锂电池(25.6 V/220 Ah)安装于舱内靠后的位置,根据船体浮态情况移动锂电池位置来调整船体总重心;水质采样设备主机、水质采样存储箱、自动气象及水质监测设备主机、充电机均置于船舱内;舱内后端紧靠舱壁处为船体最低点,在该处设置自动舱底泵以排出舱内积水。
3 无人控制系统构成
3.1 艇载子系统
船载子系统是水面无人艇的控制核心,其可根据遥控器手动控制无人艇的油门及航行方向;也可以接收岸基控制站通过无线数传电台下发的航行路径及任务,并智能分析路径命令序列;同步考虑当前无人艇位置、方向信息,通过非线性预测及最优化算法等人工智能算法计算出动力系统的控制指令,控制水面无人艇的航向和航速;同时艇载子系统会解析任务载荷的命令序列,确保水面无人艇行驶到指定地点的时候能够智能自动完成所规划的任务[3]。
在自主航行过程中,艇载子系统通过毫米波雷达探测障碍物并采用改进蚁群算法进行自主避障操控[4],操控人员仅需进行简单的状态监控。
在水面无人艇的安全控制方面,除采用传统的提高艇载软硬件系统的可靠性、故障检测监控与隔离技术、多重安全防护措施等方法提高水面无人艇的安全性之外,还采用了一种基于航行安全区域的控制手段,以解决水面无人艇失控驶出航行安全区域后对水面无人艇自身及岸基或水面设施带来的安全威胁问题,进一步提高水面无人艇的航行安全[5]。
艇载无人控制系统内部通信体系采用CAN网络,数据采集模块、驱动模块以及各任务载荷的控制单元均通过CAN网络与主控制器进行通信,便于系统的统一管理,同时提高系统的可扩展性。
水面无人艇航行过程中所有的状态信息(如位置、航行轨迹、电池电压,航行速度等信息)都通过无线数传电台发送给岸基控制站,同时通过4G通信将这些信息发送回指挥大厅。
艇载无人控制系统构架见图2。
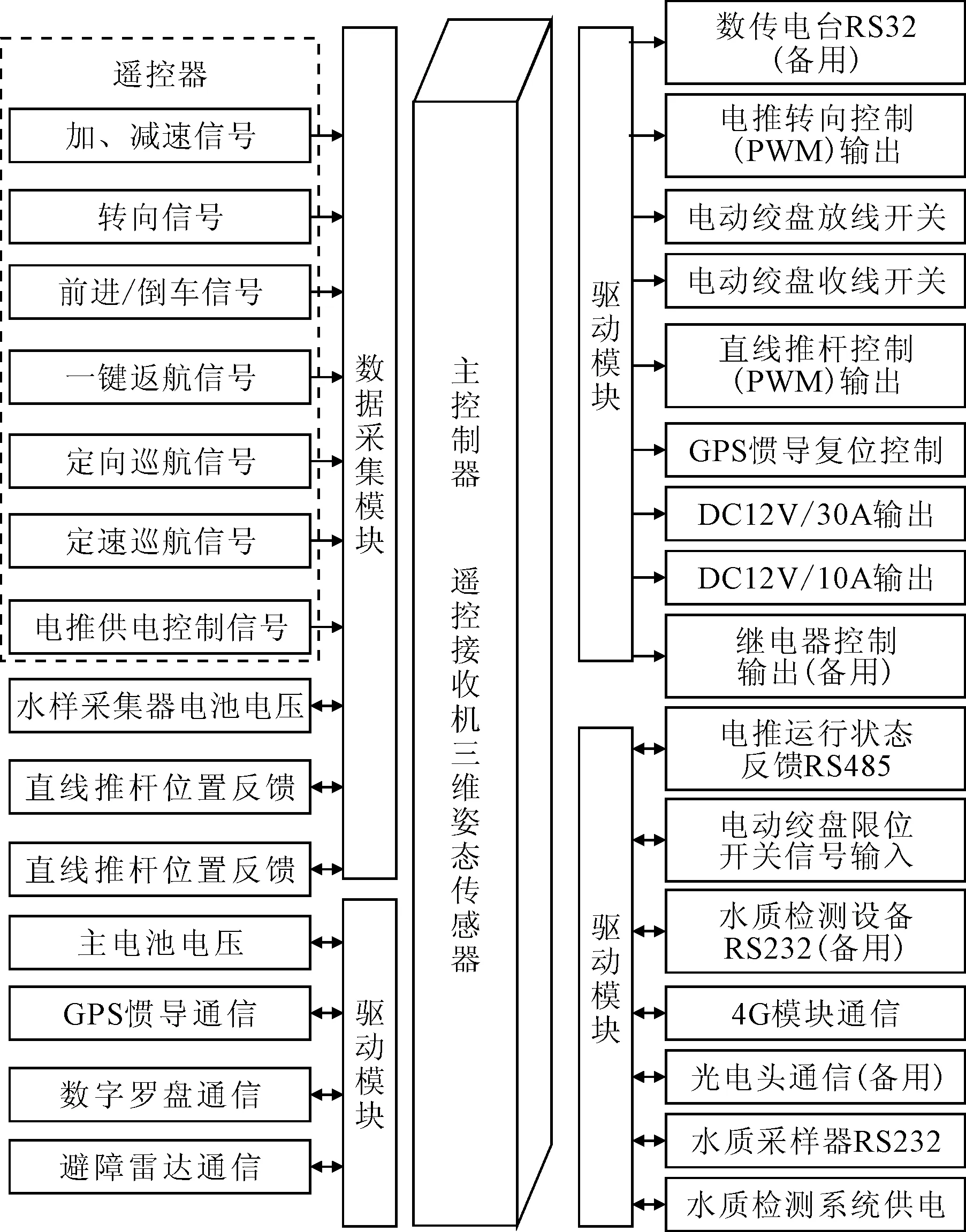
图2 艇载无人控制系统构架
3.2 岸基地面站与远程监控子系统
岸基地面站子系统作为整个水面无人艇系统作业现场的指挥中心,集控制、作业、通信、处理于一体的综合控制体[6]。其控制内容包括:水面无人艇的航行过程、航行航迹、数字地图、载荷业务控制、数据链路的维护以及水面无人艇的出发和回收控制。
为了适应野外及应急突发事件的需要,岸基地面站外壳采用三防工业级安全箱,集成所有岸基地面站所需的电控设备。三防箱采用新型工程塑料,箱体抗强力冲击,防水特性达到IP65。
远程监控子系统仅包含软件部分,是在地面站控制软件的简化版本,只具有监视功能,不具有远程控制功能,软件可以安装在控制中心能够上网的电脑上面。该系统使用虚拟串口技术,通过4G网络信号与水面无人艇进行远程通信,所以系统环境需保证网络的接入速度与质量。远程监控软件界面见图3。
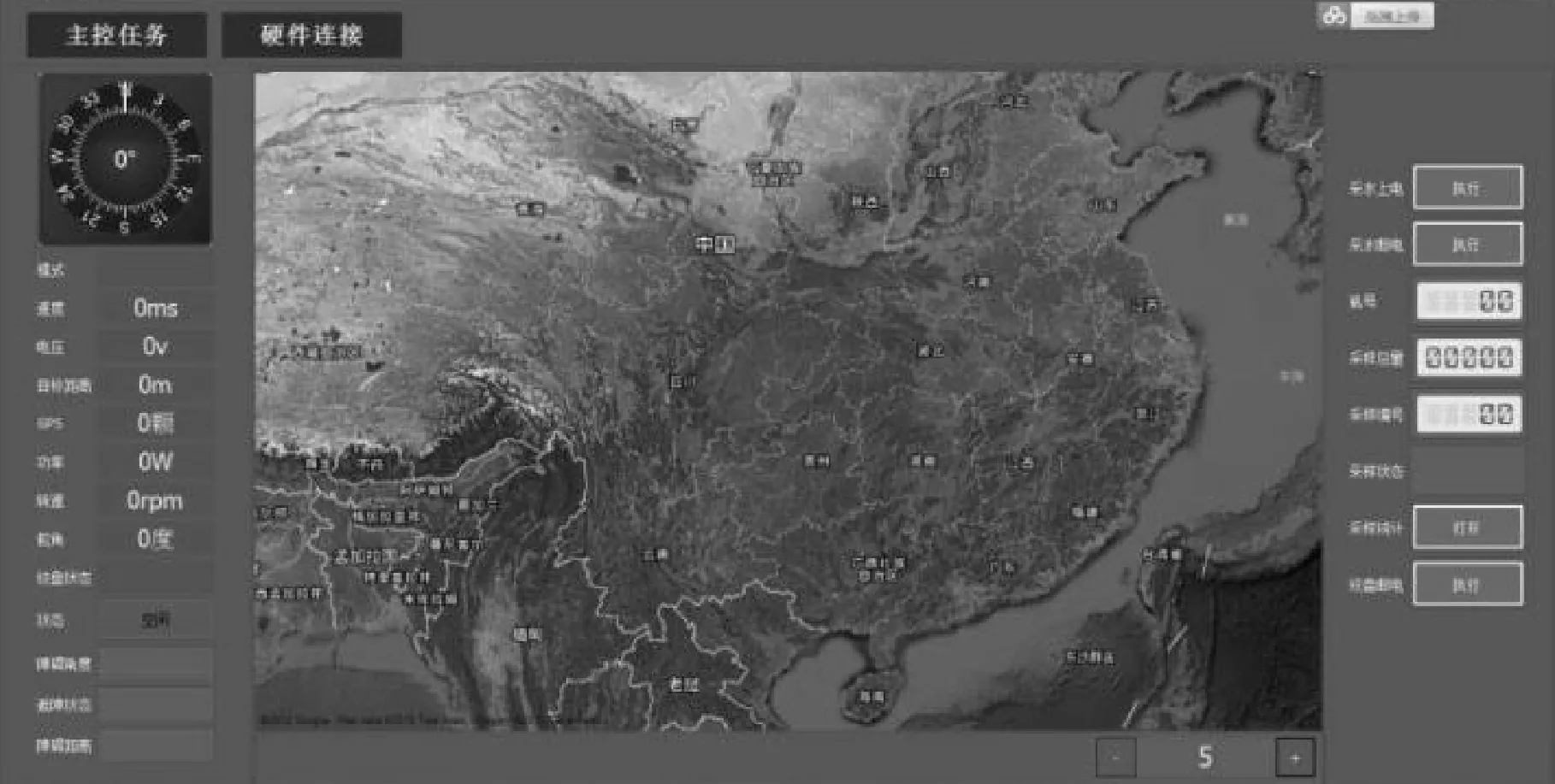
图3 远程监控软件界面
4 水上试验
试验在湖北荆州洪湖进行。
4.1 性能试验
水面无人艇在载荷60 kg时测量主要参数为:最高航速6.4 km/h,巡航速度航行续航时间244 min,有效通信范围5.2 km。
4.2 自主航行试验
根据需要在地面站软件上设置所需数量的航点,航点间距任意。通过无线数传电台将设置好的命令下发给水面无人艇艇载子系统,艇载子系统解析指令后控制水面无人艇进行自主航行。无人艇的实际航迹见图4。由图4可以看出,水面无人艇实际航迹与规划路径的重合度良好。

图4 水面无人艇实际航迹
4.3 避障功能试验
避障功能测试与自主航行测试同步进行。湖面上原先放置多个浮筒,无人艇的航行线路的前方出现了一个浮筒障碍物(见图5)。在探测到该浮筒后,无人控制系统执行避障算法,控制无人艇进行避障机动,当判断到已经避开浮筒障碍物后,无人艇继续向目标航点航行,见图6。

图5 无人艇航行前方出现浮筒障碍物

图6 无人艇绕过浮筒障碍物继续航行
4.4 水质监测试验
从水面无人艇开机到关机全过程持续进行水质监测。通过安装于天线架上的气象传感器和安装在固定于艉封板的支架上的水质监测传感器实时监测大气压力、大气温度、大气湿度、水温、水溶解氧、水PH值、浊度、叶绿素、盐度、电导率、TDS等参数。水质监测控制模块对采集到的数据进行整理分析后将结果通过CAN总线发送给4G网络通信设备,通信设备将这些数据发送回地面站和控制中心显示并存储。所发送的数据还包含经纬度坐标点和时间戳,这是通过GPS模块实时获取的。
4.5 水质采样试验
根据水质采样的相关行业要求,水面无人艇到达采样点后,控制系统控制采水探头自动下降到水面以下约50 cm的位置,并自动执行采集前管路预淋洗,采集后自动排空管路等功能,以保证采集到具有代表性的样品[7]。
所配备的采样设备具备多种采样程序启动方式:预设时间启动、外部信号触发启动、超标留样启动、即时启动、液位超标触发启动;以及多种采样程序:定时定量采样、定流定量采样、流量比例采样、液位比例采样、即时定量采样等。主控制器通过CAN通信接口与采样设备通信,在自主航行时根据预设任务控制采样设备执行水质采样工作。
4.6 漂浮式水体表观光谱观测试验
水体表观光谱观测设备实物见图7,是一套基于直接离水辐亮度观测方法的(原理如见图8)、小型化、智能化、漂流光学浮标式、直测法原位表观光谱观测设备。该设备采用高性能的工业级处理器,集成两套独立的高光谱辐射测量模块,实现直接离水辐亮度和太阳入射辐照度的同步测量,独有的小型探头、大直径的环形漂流浮标和模块化的组件设计可降低漂流光学浮标本体自阴影的影响。同时该设备集远程控制、光谱自动采集、积分时间自动调整以及同步记录姿态、GPS等功能于一体,为用户提供便捷、友好的操作体验。

图7 漂浮式水体表观光谱观测设备
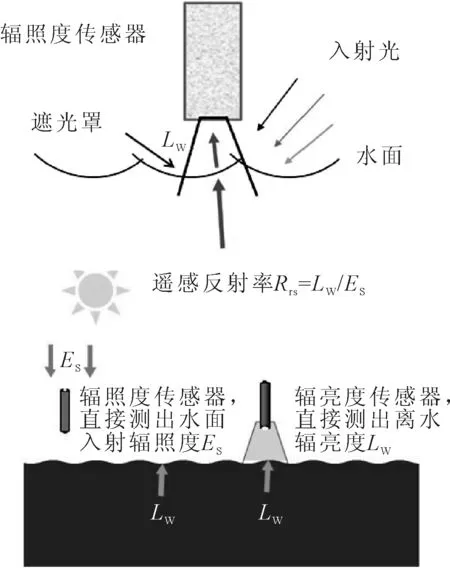
图8 直接离水辐亮度观测方法原理
根据所需光谱观测的位置,通过地面站软件设置航点并加载光谱测量的任务,然后下发给艇载无人控制系统,由艇载无人控制系统控制水面无人艇自主航行,到达测量点时,自动控制绞车设备将水体表观光谱观测设备释放出来并远离船体10~15 m,以免无人艇的阴影对测量结果产生影响。
5 结论
相比传统水体环境监测方法,多功能水体环境监测水面无人艇可在自主航行时,自动完成相应的监测、采样、分析等工作,并通过无线数据链路将相关数据反馈给控制基站显示并存储,在自动化作业程度、工作效率、实时性等方面具有突出的优势。
无人控制系统采用CAN通信网络体系结构,控制器、传感器、执行驱动器均通过CAN总线连接,布线简洁、维护方便、便于系统扩展。
无人艇采用锂电池组作为整艇的主电源,锂电池组的容量就成为该无人艇作业时间受限的瓶颈。后续应对船体结构和设备舱的布置进行优化设计,以提供更大的空间,布置容量更大的锂电池组,延长无人艇的作业时间。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
农业工程学报(2022年8期)2022-08-08
黑龙江大学自然科学学报(2022年1期)2022-03-29
疯狂英语·新读写(2021年6期)2021-08-05
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
创新作文(1-2年级)(2017年7期)2017-12-26
中国集体经济(2017年1期)2017-01-04