
车联网环境对城市快速路驾驶安全的影响评价
2020-04-29 07:09:52倪屹聆戴亚轩
交通运输研究 2020年2期
姚 佼,倪屹聆,戴亚轩
(上海理工大学管理学院,上海 200093)
0 引言
作为城市道路的重要组成部分,快速路担负着城市内部区域之间的过境交通功能,具有交通流量大、车速快、出入口坡道密集等特点[1]。然而,一旦发生交通事故,则后果严重,容易造成人员伤亡、财产损失及大面积交通拥堵[2]。国内外相关研究表明,引发交通事故的各项因素中,因驾驶员操作不当导致的交通事故占比达80%以上[3]。常规环境下,驾驶人的驾驶失误是造成车辆追尾碰撞发生的主要原因之一[4]。车联网环境因可使驾驶员实时获知前车行驶状态并从交通参与者层面提高交通流稳定性,而有望降低车辆追尾碰撞风险[5]。
国外学者针对车联网建立了各种模型,如Moon 等[6]提出了基于自适应巡航(Adaptive Cruise Control,ACC)的跟驰模型,并设计数值仿真试验,应用碰撞时间(Time To Collision,TTC)验证了所建模型对降低车辆追尾风险的有效性;Li 等[7]研究了协同自适应车辆(Cooperative Adaptive Cruise Control,CACC)对交通安全的影响,然后对智能驾驶员模型进行改进并加以验证;Rahman等[8]研究了网联汽车合作驾驶对交通安全的改善程度,其中考虑了网联车渗透率的影响。
国内学者也展开了相关研究,如李腾龙[9]构建了车联网环境下的车辆跟驰模型,并进行了稳定性分析和仿真验证,证明了车联网环境对交通流具有致稳作用;龚思远[10]研究了网联辅助驾驶系统对交通安全的影响,得出了类似的结论;秦严严等[4]重点研究了混合交通流条件下,智能网联车对交通安全的改善程度,提出了相应的优化控制方法。
整体来看,以往研究相对微观,主要以构建驾驶模型为主,均没有从宏观交通流角度分析车联网环境对驾驶安全的改善程度。本文将针对车联网的特性,改变VISSIM 中车辆驾驶模型参数,使其更加符合车联网环境下的特性,同时采用控制变量的方法,研究不同交通饱和度下,车联网对快速路上车辆碰撞风险的改善程度。
1 模型的选取及参数标定
目前全自动驾驶车辆还处于试验阶段,因此本文研究对象为人工驾驶的网联辅助车(简称网联车)。VISSIM 中使用Wiedemann 驾驶模型,它可以很好地描述人的驾驶行为,改变其关键参数可以反映驾驶员在车联网辅助下的驾驶情况,进而评价车联网环境对驾驶安全的改善程度。同时,对于常规环境下的驾驶模型参数也需要重新标定,使其更符合快速路上的驾驶情形。
1.1 车联网环境对驾驶行为的影响分析
实际驾驶过程中,为保持车辆平稳安全地行驶,驾驶员在t时刻感知自车与前车的间距Δxn(t)、速度差Δvn(t)等交通数据后,需要一个反应时间τ来调整,使车辆以理想速度行驶。大量研究表明,τ的大小对交通流稳定性的影响较大:τ越小,驾驶员对交通变化的反应越快,产生碰撞风险的可能性就越小;τ越大,则发生危险碰撞的可能性增大[11]。在传统驾驶环境下,驾驶员只能接受临近车的运动信息,然后根据驾驶经验进行操作,很容易出现判断失误或者反应不及时的问题。而在车联网环境下,驾驶员可以准确获取前后车的各项交通状态信息,如实时速度、加减速度、前后车距等。另外,由于不需要估计前车的运行状态及其可能的变化情况,驾驶员可以将注意力更多地集中到对车辆的操作方面。这种情况下,驾驶行为将会出现两种变化趋势:驾驶员反应时间τ缩短;驾驶员会一定程度地提前了解前后方交通流的变化,并随之调整车速或者换道。
传统环境下,驾驶员依据车辆间距的变化来控制车速:车间距Δxn(t) 变大时加速,反之减速。而在引入了车联网后,驾驶员能够实时、精确地获取前车的各项运动状态变化(例如前车开始加速,但速度差Δvn(t)并未发生变化),从而立刻做出加减速操作,即驾驶员可以提前做出正确的操作,以避免交通事故的发生。
1.2 车联网环境下的模型参数取值
车辆的运动状态归根结底是驾驶员对周围环境的判断在车辆上的反应。相比于传统驾驶环境,车联网可以帮助驾驶员获取自车周围更多的交通信息,使其对前方交通状态进行预判,从而正确做出下一步操作决策[12]。如前方路段出现交通阻塞时,即使自车与引导车间距较大,驾驶员也不会贸然加速,从而有效避免车速震荡,提高交通安全性。反之,如果前方道路交通状况良好,即使车辆间距较小,驾驶员也不会有很大的减速行为,而是继续保持当前状态或实施换道超车[13]。因此,车联网环境下,车辆的运行速度会更稳定,驾驶行为也会更加科学合理。可见,借助车联网技术,驾驶员因预先获得前方的准确交通信息,提前作出决策,从而使道路交通安全性得以提高。
VISSIM中的驾驶行为参数需要结合实际重新标定。李志伟[14]结合前人研究并考虑我国的交通特征对Wiedemann99 模型(适用于快速路)参数做了新的标定。本文参考其标定结果作为常规驾驶环境下驾驶行为的部分参数值;车联网环境下,驾驶员的反应时间缩短,车头时距和车辆行驶速度也更稳定(无分布和震荡)。在VISSIM中,根据上述假设,修改一些关键驾驶行为参数,并将这些行为参数与VISSIM中构建的车辆模型相关联,即可有效模拟车联网环境下的驾驶情况。重新校准的两类驾驶环境模型参数值见表1。
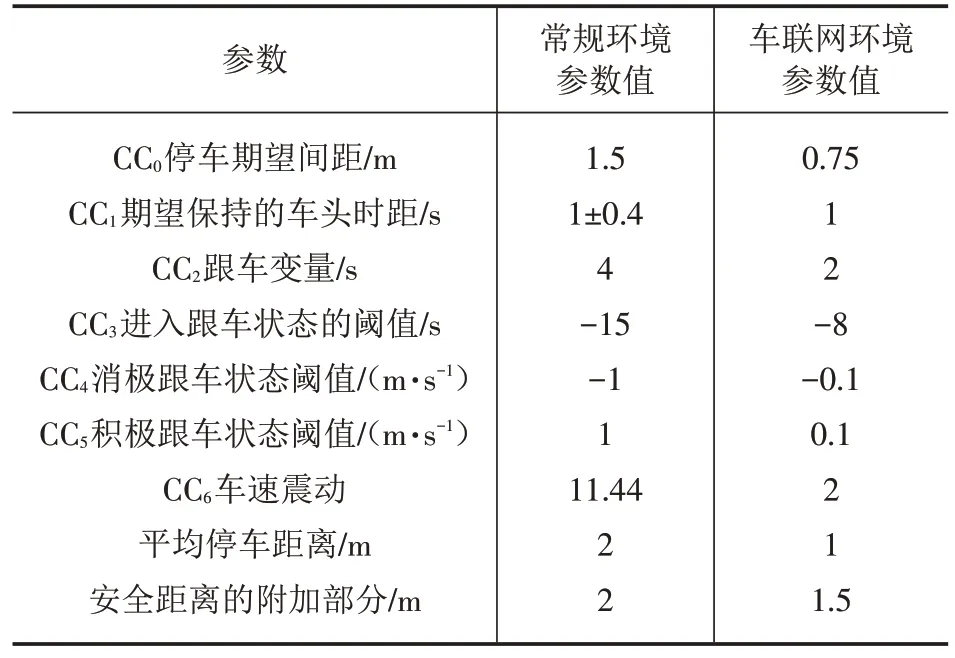
表1 基于Wiedemann99模型的主要参数标定结果
2 城市快速路驾驶行为安全性评价指标
安全的替代参数被广泛地用作交通风险评价指标,包括平均变化速度Δvˉ、碰撞时间TTC 和后侵入时间(Post Encroachment Time,PET)等[15-16]。本研究考虑三种安全指标来评估交通安全性,并分析不同场景下车联网技术对快速路驾驶安全的改善程度。
2.1 城市快速路纵向安全评价指标
TTC 是常用的安全评价指标之一,而累计碰撞时间(Time Exposed Time-to-Collision,TET)和积分碰撞时间(Time Integrated Time-to-Collision,TIT)则是以TTC 为基础的安全评价指标,用来揭示跟驰行为和纵向安全性之间的关系[17]。
TTC 指如果引导车和跟随车之间一直存在速度差(跟随车速大于引导车速),将存在车辆追尾的风险。具体而言,TTC 代表两个连续车辆到达同一断面所需要的时间,如果车n的速度一直比前车n-1 快,那么两车就会发生碰撞[18]。TTC的计算公式为:

式(1)中:t为仿真时刻;n为车辆编号;TTCn(t)为第n辆车在t时刻的碰撞时间,仅在后车速度大于前车速度时才有意义,否则为无穷大;xn(t)为t时刻第n辆车的位置;xn-1(t)为t时刻第n-1 辆车的位置;Ln-1为第n-1 辆车的长度;vn(t)为t时刻第n辆车的速度;vn-1(t)为t时刻第n-1辆车的速度。
TET 指前后车处于危险跟随状态所花费的总时间,即实际TTC 值小于设定TTC 阈值(记为TTC*)持续的时间,该值侧重于描述发生追尾风险的可能性。TIT 表示实际TTC 与设定TTC*之差的累加和,侧重于描述发生追尾时的严重程度。以上两个指标值越小,纵向交通安全水平越高[19]。二者的计算公式如下:
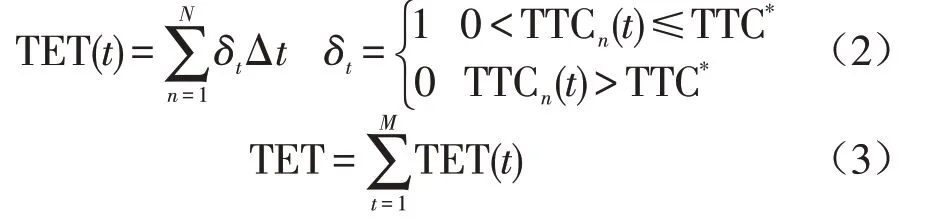
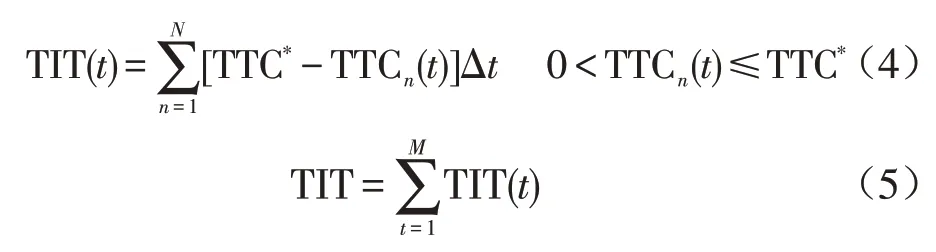
式(2)~式(5)中:n为车辆编号;δ为切换变量;Δt为仿真步长,取值为0.1s;TTC*为碰撞时间(TTC)的阈值;TET(t)和TIT(t)分别为t时刻TET 和TIT 对应的值;N为仿真中获得的车辆总数;M为仿真总时间(不包含预热时间);t,TTCn(t)意义同前。
2.2 城市快速路侧向安全评价指标
交通事故中不仅存在追尾碰撞冲突,侧向碰撞也是快速路上频繁发生的事故之一,特别是在车辆换道期间。为了达到较好的验证效果,本文中假设侧向碰撞主要发生在车道合并的路段。然而,直接分析侧向碰撞是非常困难的,因此采用侧向碰撞风险(Sideswipe Crash Risk,SSCR)作为替代评价指标,并用替代安全评估模型(Surrogate Safety Assessment Model,SSAM)分析VISSIM 生成的轨迹文件,进而检测车道变换产生的侧向冲突。
在SSAM 中,主要碰撞类型如图1 所示。当冲突角度θ在0~30°范围时,判定为纵向冲突(追尾);冲突角度θ在30~80°范围时,视为侧向冲突(换道);当实际碰撞时间小于设定碰撞时间阈值且冲突角度在规定范围内时,则认为有侧向碰撞的风险,统计其出现的次数记为SSCR的值。
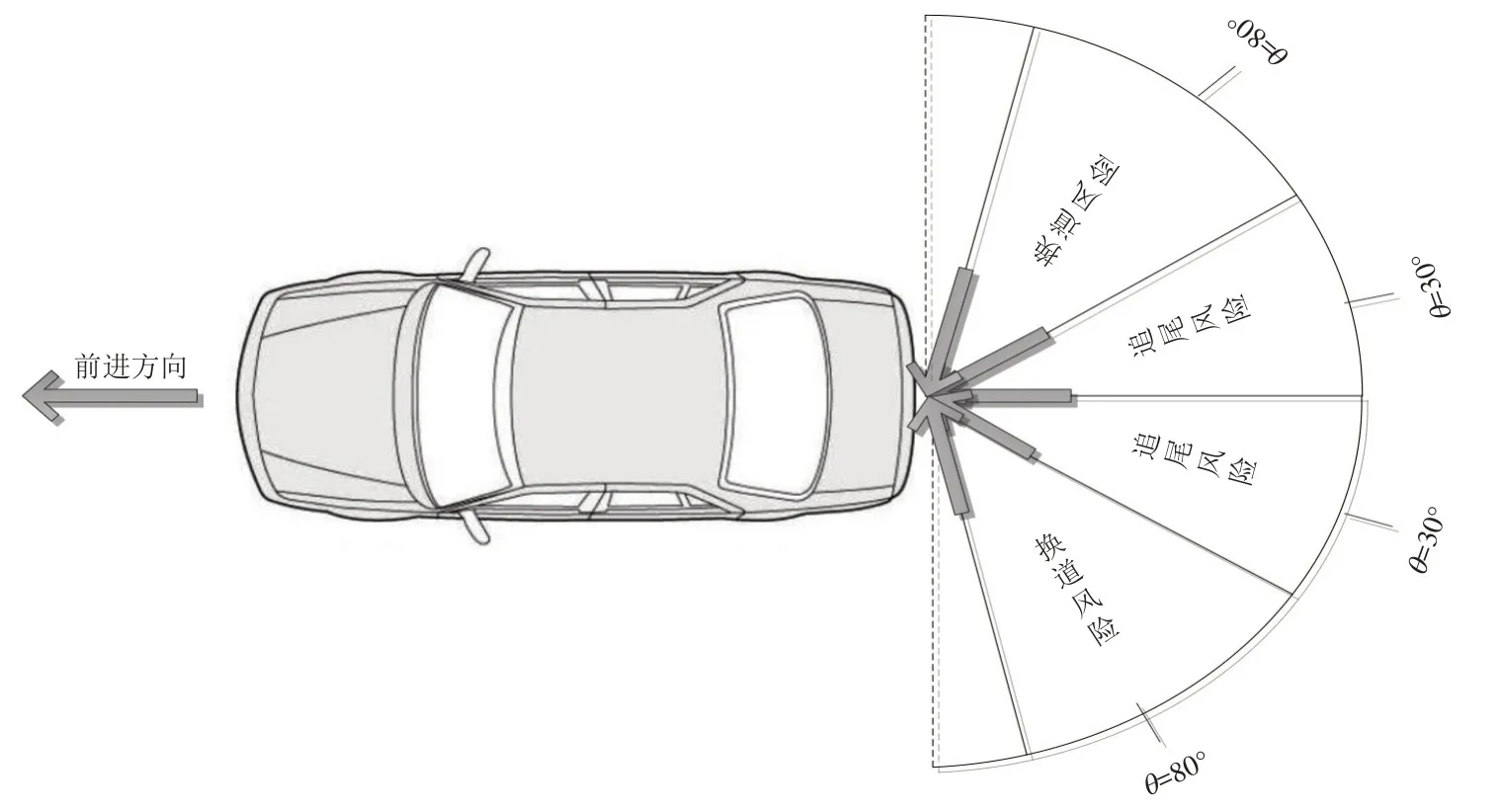
图1 碰撞分类
仿真试验中VISSIM 生成了几组轨迹数据文件,其中包含车辆的位置坐标、速度信息和偏转角度等。利用SSAM 分析这些轨迹文件,以便比较不同情景中追尾和侧向的碰撞风险系数。本文选取TET,TIT 和SSCR 作为安全评估指标,以评价车联网技术对快速路驾驶安全的影响程度。
3 仿真模拟与分析
本文的研究对象是城市快速路,交通参与者以小型汽车为主,因此不考虑车型的影响,在VISSIM 中全部使用小汽车3D 模型进行交通仿真。在正常行驶过程中,车辆之间很少发生追尾事故,除非前车有急减速或后车急加速,因此可以模拟道路前方出现交通事故的情形。另外,快速路上最容易发生事故的地方是合流、分流区,该区域的侧向碰撞较多,可利用SSAM 检测轨迹文件发现冲突,再通过评价指标进行计算。
根据上述分析,本文设计了一条单向三车道快速路,全长约5km,其中在1km 处设有一条单车道入口匝道,3km 处设有一条单车道出口匝道,进口匝道的加速车道长为400m[14,20],3 900m处设置1 个瓶颈用以模拟城市快速路交通事故,4km 处道路恢复三车道进行仿真试验。仿真场景如图2所示。

图2 仿真模拟场景示意图
下面分别从网联车渗透率和交通饱和度这两个角度,对驾驶行为的安全性进行评价。每种情形分别使用不同的随机种子数,进行5 次独立仿真。每次仿真运行持续3 600个模拟秒,将前400个模拟秒作为预热时间,使车道被车辆完全占用。
3.1 不同渗透率下驾驶行为的安全影响评价
将此场景的上游交通量设为3 600pcu/h,进口匝道车辆输入为800pcu/h,改变网联车的比例进行仿真试验,并用选定的安全评价指标分别进行计算,取其平均值作为相应的结果。计算时,取TTC 的初始阈值为2s,然后改变TTC*(±1s)进行敏感度分析。本文以常规车情况下的TET 和TIT 为基准值,改变交通输入组成,加入网联车模型并改变其比例,计算TET 和TIT 相对于基准值的降低比例,最终得到不同网联车比例(渗透率)下混合车流相对于全常规车交通流的交通安全提升比例。计算结果如表2所示。
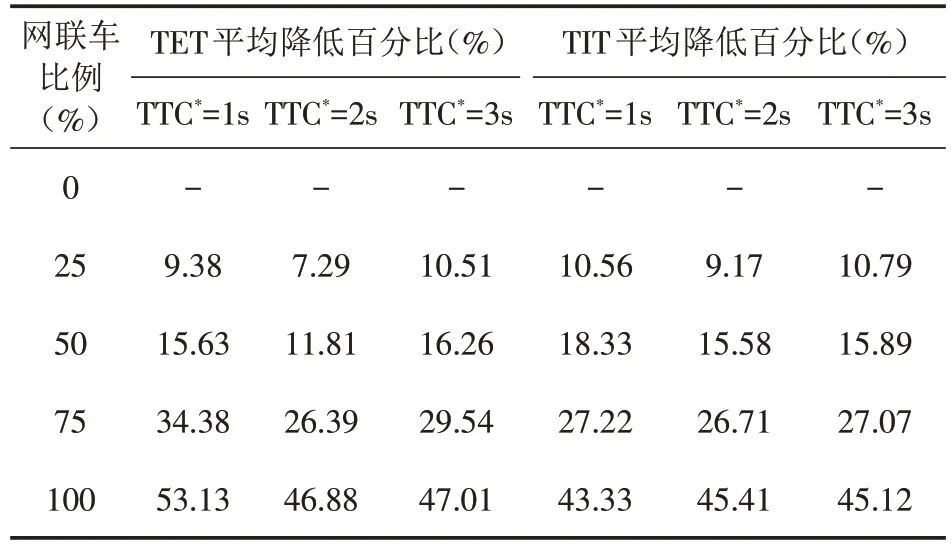
表2 不同渗透率下车辆追尾风险仿真结果
通过表2 不难发现,TET 和TIT 的值随着网联车比例的增加而逐渐降低。这说明随着网联车渗透率的增加,交通安全水平也随之提高,且TTC*取值的变化对计算结果的变化趋势基本没有影响,从而表明网联车有利于降低纵向驾驶风险(追尾)。
不同渗透率下纵向追尾安全变化趋势如图3所示。从中可以发现,网联车渗透率对快速路纵向驾驶行为的影响呈现出明显的三阶段,即缓慢提升阶段(0~50%)、快速提升阶段(50%~75%)和显著提升阶段(75%~100%)。各阶段渗透率对纵向交通安全的影响为:渗透率每提升1%,TET 分别降低0.29%,0.62%,0.76%,TIT 分别降低0.33%,0.42%,0.70%。只有网联车渗透率达到较高水平时,才能有效提升快速路的纵向交通安全水平。
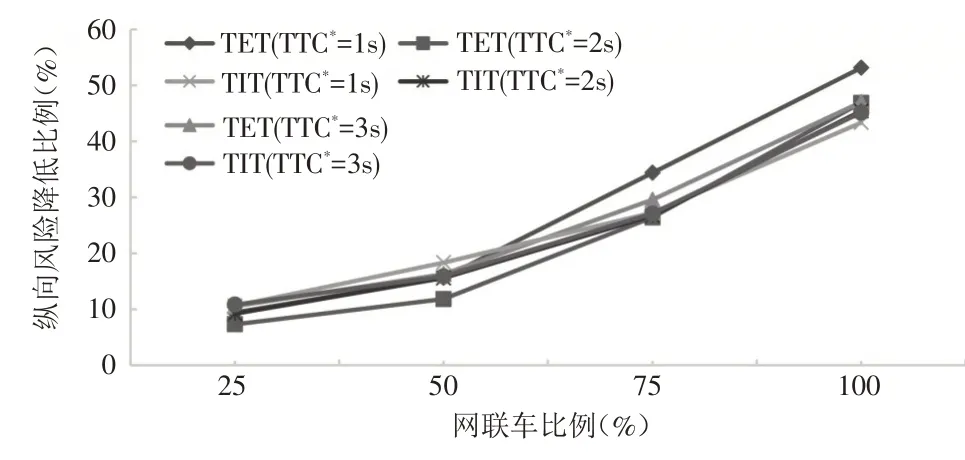
图3 不同渗透率下纵向追尾安全变化趋势
对于换道产生的侧向碰撞风险,车联网也能发挥比较明显的积极作用。同样取3 个不同的TTC 阈值,得到不同渗透率对应的侧向碰撞风险数,再计算侧向安全提升程度的百分比。变化结果如图4所示。
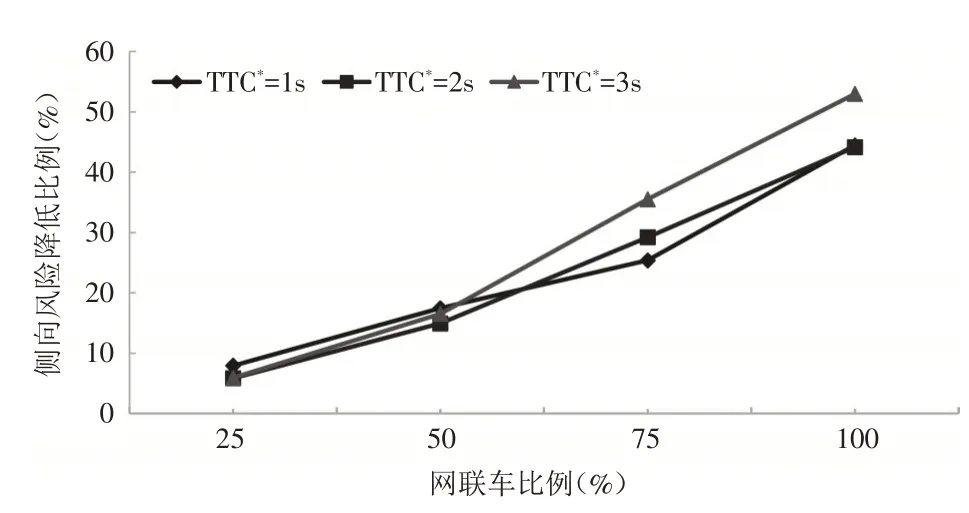
图4 不同渗透率下侧向碰撞安全变化趋势
根据图4 可知,随着网联车渗透率的增加,侧向碰撞的风险也随之降低。当网联车渗透率在25%左右时,平均安全提升比例约为6.57%;当网联车渗透率提升至50%时,安全系数提升到16.62%;当网联车比例达到75%时,安全提升比例为30.04%;当全部替换为网联车时,安全提升幅度更大,平均碰撞风险降低了47.19%。类似于纵向交通安全,侧向碰撞风险的降低呈现出一样的三阶段趋势,即各阶段的渗透率每提高1%,侧向交通安全分别提高0.33%,0.54%,0.69%。
3.2 不同交通饱和条件下驾驶行为的安全影响评价
除了网联车渗透率对交通安全的改善程度有影响外,不同的交通饱和度条件下,网联车对交通安全的改善程度也不同。由于快速路上每天的交通饱和度变化显著,因而研究不同饱和度下的交通安全,具有一定的现实意义。本文设定的期望速度约为80km/h,则每条车道的设计通行能力为1 800pcu/h[20]。以实际输入交通量与设定最大通行能力的比值(),作为快速路的交通饱和度,分别对低饱和(<0.6)、中饱和(0.6~0.8)、高饱和(0.8~1.0)和过饱和(>1.0)4个饱和度条件下的交通流进行仿真试验,并用安全评价指标进行评估。计算网联车的TET 和TIT,并和相应常规车的指标值进行比较,结果如表3所示,变化趋势如图5所示。

表3 不同饱和度下车辆追尾风险仿真结果
由表3 可知,随着交通饱和度的提升,网联车对追尾碰撞的风险降低明显,说明车联网在道路交通较为拥挤时,能提供更大的帮助。城市快速路在早晚高峰时的交通安全隐患比较多,试验结果表明,借助车联网技术可以有效降低碰撞风险,而且在交通较为拥挤的情况下,效果更明显。
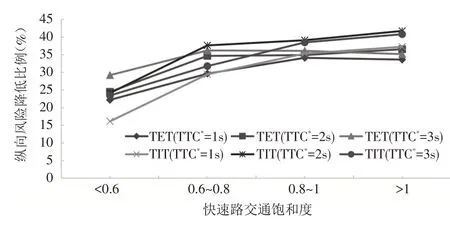
图5 不同饱和度条件下纵向追尾安全变化趋势
由图5 可知,低饱和度时的TET,TIT 平均降低比例分别为25.31%和21.23%;中饱和度时的TET,TIT平均降低比例为33.51%和32.95%;高饱和度时的TET,TIT 平均降低比例为35.05%和37.65%;过饱和度时的TET,TIT 平均降低比例分别为35.12%和39.96%;当道路交通达到饱和后,网联车对安全的提升比例依然在增加,但是变化幅度逐渐减缓。
同理,以常规车的侧向碰撞风险数作为基准值,研究交通饱和度的变化对侧向安全的影响程度,结果如图6所示。
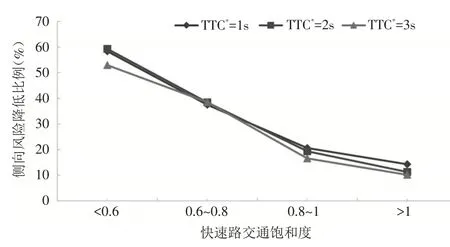
图6 不同饱和度条件下侧向碰撞安全变化趋势
由图6 可见,随着快速路交通饱和度的不断提升,换道行为变得越来越困难,此时低饱和、中饱和、高饱和、过饱和条件下,对应的SSCR平均降低比例分别为56.83%,38.13%,18.53%和11.90%,由此可见网联车对侧向碰撞的减少比例在逐渐降低,特别是在道路处于过饱和条件下,安全改善程度显著降低。对于该现象比较合理的解释为:过饱和条件下,换道行为明显减少,因此侧向安全的改善程度反而会降低。
4 结论
为评价车联网环境对快速路交通安全的改善程度,本文根据车联网特性对VISSIM 中的驾驶行为参数进行了重新标定,并从纵向和侧向两个角度选取3 种安全评价指标(TET,TIT 和SSCR)作为追尾风险和换道风险的评判标准,最后按照需求设计了1 条快速路进行仿真,分析了不同情形下车联网环境对交通安全的影响,得到如下结论。
(1)网联车比例的增加可降低交通流车辆追尾和侧向碰撞的风险,且比例越高,快速路上的交通安全系数提升越明显。当网联车占比达到75%以上时,安全提升程度大幅增加。
(2)在交通饱和度不断增加的过程中,网联车对交通安全的改善作用发挥得越充分,特别是在自由流转高峰的过渡期间,改善效果最为显著。但当道路交通过饱和时,改善效果会减缓。随着道路车辆越来越多,城市快速路的交通负担将会进一步增大,驾驶安全问题也会更加严峻。因此,应用车联网技术进行安全辅助驾驶不失为一种有效的措施。
试验过程中还发现,如果考虑更广泛的通信距离,交通安全提升效果也会更加明显。可以预见,随着网联车通信技术的不断发展,未来的交通环境会越来越安全。需要指出的是,本文中的仿真场景较为理想,未考虑其他因素(大型车辆、驾驶员特性、道路线形等)对交通安全产生的影响。另外,在保证安全的条件下,利用车联网提高快速路通行效率也是一个值得深入研究的方向。
猜你喜欢
内燃机与配件(2022年2期)2022-01-17 23:46:44
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
高技术通讯(2021年3期)2021-06-09 06:57:30
上海公路(2019年1期)2019-06-18 11:05:06
东南大学学报(自然科学版)(2018年1期)2018-02-08 00:40:30
中国公共安全(2017年9期)2017-02-06 03:05:39
光学精密工程(2016年3期)2016-11-07 09:03:52
通信电源技术(2016年1期)2016-04-16 04:57:35
西北工业大学学报(2015年1期)2016-01-19 03:29:56
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05 02:19:37
