
危险边坡智能监测及预报警综合系统的构建
2020-04-29 05:30梅天灿左治江李仁威李连杰
江汉大学学报(自然科学版) 2020年2期
梅天灿,左治江,王 刚,李仁威,李连杰
(1.武汉大学 电子信息学院,湖北 武汉 430072;2.江汉大学 机电与建筑工程学院,湖北 武汉 430056)
0 引言
我国铁路、高速公路和城市高架已进入高速发展时代,为中国经济的发展提供了强大的支撑,与此同时线路安全也成为一个迫切需要解决的问题。由于这些线路沿线地形复杂,路侧边坡的防护和监控成为交通安全中不可忽视的问题[1]。针对路侧边坡的安全监测,传统的方式是人工巡查[2]。该方式的检测存在较大误差、难以做到对灾害的预测,而且易受天气的影响。
由于人工检查劳动强度大,因此对路侧边坡的监测和预警的智能化是发展的要求[3-4]。目前,已经有很多研究机构和企业对边坡监测和预警做了大量工作。在文献[5]中,比较了几种不同的激光扫描方法监测边坡的变化,可以不定期地对边坡进行检测。在文献[6]中基于地面激光扫描仪和全球导航卫星系统,构建了一种监测冻土边坡变形的系统,解决了冻土边坡中灾害预测问题。这些系统的主要特征是结构复杂、实施条件要求高、现场安装难度大,另外造价昂贵,难以在条带状分布的公路和轨道工程中推广应用,而且对异物入侵路面的情况也不能解决。为做到“预防为主、综合防护、实时监控”的安全要求,本研究采用激光扫描技术与光纤光栅传感技术相结合的方式,通过对边坡内部形变和路面或轨道异物入侵的监测,对边坡落石、树木倾倒、车上落物及滑坡进行预警和报警。
1 系统技术方案
1.1 系统概述
危险边坡智能监测及预报警综合系统是以激光雷达技术和光栅传感技术为核心,集光电技术、计算机软件技术、信息处理技术、控制技术和通信技术于一体的自动监测报警系统。系统融合多传感器数据,以主动预报和实时监控报警的方式,实现对高危路段边坡的全方位监测。系统能全天候24 h 不间断工作,能有效排除行车、行人、动物等因素的干扰,准确判断落石灾害。
1.2 系统组成
危险边坡智能监测及预报警综合系统由1 个监控中心、1 个现场监控中心和4 个功能模块构成,分别为:监控中心、现场监控中心、激光扫描监测功能模块、边坡监测功能模块、视频监控功能模块和GNSS 时间同步功能模块。系统组成如图1 所示。
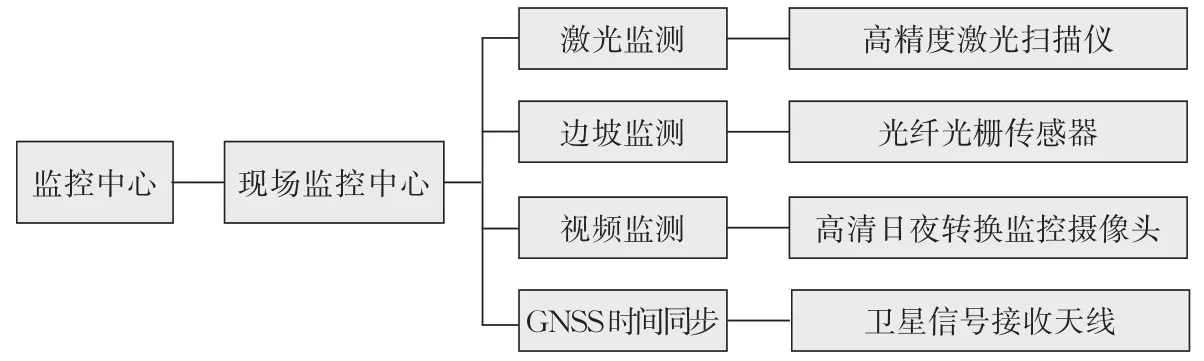
图1 系统组成示意图Fig.1 Diagrammatic sketch of system composition
监控中心主要由服务器、监测终端等组成,实现系统状态监控、系统参数设定、报警信息显示、报表统计与打印等功能。
现场监控中心主要由高性能工控机、光纤交换机等组成,实现对多功能模块报警信息的融合,搜集系统状态数据并向监控中心反馈,控制现场报警装置等功能。
激光监测功能模块主要由高精度激光扫描仪和工控机等组成,实现对危险边坡旁路面或城市交叉路口的实时监测,在限界区域内发现满足报警条件的异物时发送报警信息。
边坡监测功能模块主要由光纤光栅传感器、光纤光栅解调仪等设备组成,实现对边坡落石、滑坡的预警和报警。
视频监控功能模块主要由高清日夜转换监控摄像头、摄像机杆组成,完成对监控现场的实时高清影像监控。
GNSS 时间同步功能模块主要由同步控制授时单元和多个同步控制接收单元组成,实现系统内部的精确对时,保证系统的稳定性。
2 激光扫描监测功能模块
激光扫描监测功能模块(如图2 所示)主要由激光监测单元、智能分析单元、集成监测监控单元、系统保障单元、精密调平装置等组成。激光扫描监测功能模块作为系统的感知部分,安装在距线路中心大于2 700 mm 的合适位置。单套激光扫描监测功能模块能够覆盖直径38 m 的半圆区域,布置在边坡对侧的通信杆附近。

图2 激光扫描监测功能模块结构图Fig.2 Structure of laser scanning monitoring function module
2.1 激光扫描监测单元
激光扫描监测单元利用激光雷达技术对监测范围实施高频率扫描,实时获取高频率、高精度的激光测量数据,为系统其他单元提供数据支撑。激光扫描仪的主要技术参数如表1 所示。

表1 激光扫描仪参数表Tab.1 Parameters of laser scanner
2.2 智能分析单元
智能分析单元对实时获取的高精度激光测量数据进行智能分析,实现对落石的快速判别和定位,并发送报警信息及报警时的激光扫描仪数据。
智能分析单元的处理任务为:对高频率高精度激光测量数据进行实时智能分析,按照预设的参数进行判断,区分行人、奔跑的动物、运动的汽车、倾倒的树枝、车上落物和落石等,根据系统的分析和判断,当达到报警条件时发出报警信息。若投影长度大于200 mm、高于地面70 mm 的物体落于路面上,自动监测系统则发出实时报警,维护人员迅速到达现场处理落石险情。主要技术参数如表2 所示。

表2 智能分析单元主要技术参数表Tab.2 Main technical parameters of intelligent analysis unit
2.3 集成监测控制单元
集成监测控制单元由温度控制单元、智能监测单元、保护单元和通信单元组成,采用电路鲁棒性设计,确保集成监测控制的稳定可靠。电源部分采用防浪涌、低功耗和双保险设计,提供稳定可靠的电源,保证系统的正常运行。其功能框图如图3 所示。

图3 集成监测控制单元功能框图Fig.3 Functional block diagram of integrated monitoring and control unit
智能监测单元实现对系统内温度的监测、输入交流电通断的监测和设备工作状态的监测。该单元实时监测系统内的温度变化,并根据系统内的温度来判断是否启动或停止温控设备;实时监测输入交流电,在输入交流电断路时,及时发送报警信息;实时监测设备工作状态,当设备实际工作状态与控制状态不一致时,及时发送报警信息。温度控制单元采用双保险设计,保证能够有效控制温控设备对系统的温度进行控制。保护单元有防雷、防静电保护电路的设计和自检功能的设计,确保系统能够在极端恶劣的天气环境下正常运行。通信单元采用双路RS232 通信方式,确保通信的连续性。集成监测控制单元主要参数如表3 所示。

表3 集成监测控制单元主要参数Tab.3 Main parameters of integrated monitoring and control unit
2.4 精密调平装置
设计实现多自由度的精密调平装置,能够简单快速地调整激光扫描仪,使扫描平面与路面或轨道面平行。精密调平装置角度调节精度达到0.003 0。
2.5 激光扫描自动监测软件
激光扫描自动监测软件的主要模块框架结构如图4 所示。

图4 激光扫描自动监测软件主要模块Fig.4 Main modules of laser scanning automatic monitoring software
1)背景标定。获取扫描区域背景数据并进行均值滤波。背景标定可分为静态标定和动态标定两种。
静态标定是指在标定过程中需要保证标定区域没有运动物体的干扰,区域内所有物体保持静止状态,在室外的道路环境中较难实现,需要的时间较短。
动态标定是指在标定过程中可以允许运动物体的干扰,没有特殊要求、易于操作,因为干扰的不确定,标定所需时间较长。
静态标定适合初次安装标定,动态标定适合后期通过远程控制标定,便于周期性的标定参数修正操作。
2)监测区域标定。获取监测区域距离监测面约7 m 处的断面在激光扫描仪扫描区域内的激光点云数据,对其进行均值滤波后保存为监测区域的标定数据。
在监测区域标定过程中,使用监测区域标定板在监测区域按路面车辆行驶方向的投影,缓慢通过激光扫描仪的扫描区域,软件记录并整合标定板在通过扫描区域时的激光点云数据、整合后的激光点云数据,经过滤波等计算后保存为监测区域标定数据。可以按照由近及远的顺序标定多条限界。
3)设备自身姿态位置标定。在激光扫描监测功能模块安装标定完毕后,激光装置姿态位置变化会直接影响到激光测量数据的精度,可能导致激光数据的分析出现错误,严重影响到系统的稳定性和可靠性。在系统标定过程中,在扫描区域内放置一个定制的标定板,记录激光装置测量的标定板数据作为参考数据。系统运行时,对每一帧的激光测量数据逐点分析,对比标定板的参考数据,监控误差。当标定板的激光测量数据与参考数据不完全一致时,确认激光装置姿态位置出现变化,软件自动重标定,重新获取系统标定数据,提高系统的可靠性。
4)自动监测。监测识别区域内的障碍物,获取障碍物的大小、方向、位置。
5)报警、数据上传。发送报警信息,并将报警期间的激光点云数据上传到现场控制中心。
6)报警解除。接收外部输入的报警解除指令,停止发送报警信息,重新完成动态标定后再启动自动监测功能。
3 边坡监测预警功能模块
边坡监测功能模块由边坡落石监测单元、边坡内部形变监测单元、系统保障单元构成,包括光纤光栅传感器、光纤光栅波长解调仪、计算机、连接光缆、传输光缆、续接盒/终端盒等设备。光纤光栅传感器通过连接光缆串接,通过波分、时分和空分复用形式连接组网,由传输光缆连接到监控室内的光纤光栅波长解调仪,解调仪将传感光波长信号解调为电信号,由计算机通过有线或无线方式发送到远程计算机(或互联网)。系统组成如图5 所示,8 通道光纤光栅波长解调仪如图6 所示。主要技术参数如表4 所示。

图5 光纤光栅传感监测系统组成Fig.5 Composition of fiber grating sensing and monitoring system

图6 8 通道光纤光栅波长解调仪Fig.6 Eight channels fiber grating wavelength demodulator

表4 GS-YB-FBG-Ⅰ型光纤光栅解调仪的主要技术参数Tab.4 Main technical parameters of GS-YB-FBG-Ⅰfiber grating demodulator
3.1 边坡落石监测单元
根据边坡现场勘查,选择有利的位置安装搭载光纤光栅拉力传感器的被动柔性防护网,由于锚拉绳为被动柔性防护系统的主要受力部件,可以将光纤光栅拉力传感器与锚拉绳串接,如图7所示。当巨石撞击防护网时,锚拉绳受到巨大冲击力,拉力传感器可测量冲击力的大小,而且可以根据受到冲击前后的拉力状态来判断防护网是否受到破坏。光纤光栅拉力传感器在柔性被动防护网上的布置示意图如图7 所示。

图7 光纤光栅拉力传感器在柔性被动防护网上的布置示意图Fig.7 Layout of fiber grating tension sensors on flexible passive protection network
光纤光栅拉力传感器(如图8 所示)串接安装于防护网的锚绳上,可用于上拉和侧拉锚绳、上支撑绳和下支撑绳的拉力检测。根据拉力传感器测得的动态拉力值大小及受到冲击前后的静态拉力值对比情况来判断防护网的破坏状态,并据此来确立预报模型与报警触发条件。根据不同型号防护网以及拦截滚石撞击能量大小的不同,设计了30、50、150、200 kN 等多种量程的光纤光栅拉力传感器。其安装结构如图9 所示。

图8 光纤光栅拉力传感器Fig.8 Fiber grating tension sensor

图9 光纤光栅拉力传感器的安装Fig.9 Installation of fiber grating tension sensors
光纤光栅拉力传感器的主要技术参数如表5 所示。

表5 光纤光栅拉力传感器的主要技术参数Tab.5 Main technical parameters of fiber grating tension sensor
3.2 边坡内部形变监测单元
光纤光栅边坡内部形变(或位移)监测采用传统的边坡内部形变测量方法,但与传统方法又有很多不同。其方法是在测斜管两侧粘贴两路光纤光栅组,光栅间隔、数量根据测量深度和精度设定,通常光栅间隔为1 m。测量原理是利用光纤光栅测量的测斜管上的应变分布来重构测斜管的形变(或位移)。其安装示意图如图10 所示。

图10 测斜管边坡内部形变监测示意图Fig.10 Schematic diagram of slope internal deformation monitoring of inclinometer
GS- TM- CX- Ⅰ型光纤光栅测斜仪由一系列光纤光栅弯曲传感器与连接管连接组成,在光纤光栅弯曲传感器圆周相隔180°方向上粘贴两个光纤光栅,通过两个光纤光栅测量的应变来感测弯曲变形,同时具有温度补偿功能。传感器与连接管之间的物理连接通过螺丝固定,信号连接通过单芯铠装光缆,如图11 所示。光纤光栅弯曲传感器外形尺寸(外径、内径和长度等)、数量、间隔等,可根据具体使用情况而选定。

图11 光纤光栅测斜仪的连接示意图Fig.11 Connection diagram of fiber grating inclinometer
GS- TM- CX- Ⅰ型光纤光栅测斜仪的主要技术参数如表6 所示。

表6 光纤光栅测斜仪主要技术参数Tab.6 Main technical parameters of fiber grating inclinometer
3.3 光纤光栅测斜管安装
钻孔安装适合于在岩土内部安装。钻孔后,即可安装测斜仪。安装时,先放入一节连接管,然后插入第一个光纤光栅弯曲传感器(有跳线接头的一端为末端),连接管插入到传感器的中间位置,弯曲传感器与连接管之间采用螺丝固定;再插入另一节连接管,两节连接管要贴紧,再用螺丝固定,在连接管与传感器的缝隙中填入胶黏剂紧固,之后缓缓放入。接下来,安装第二个光纤光栅弯曲传感器,以此类推。安装情况如图12 所示。
在连接管和传感器连接处的缝隙中填充胶黏剂,进行紧固粘贴使其成为一体,该方法非常重要,否则会影响测量精度。等测斜仪完全放入后,缓缓倒入泥浆或细沙,要求泥浆或细沙要填实,否则也会影响测量精度。测斜仪上粘贴的一对测量光栅的方向,应与测量位移或形变方向一致(见图13)。

图12 测斜仪在岩土内部安装情况Fig.12 Installation of inclinometer in rock and soil

图13 光纤光栅测斜仪在边坡防护工程上安装示意图Fig.13 Installation diagram of fiber grating inclinometer in slope protection engineering
3.4 光纤光栅测斜软件
光纤光栅测斜软件是针对GS- TM- CX- Ⅰ型光纤光栅测斜仪开发的专业分析软件。它根据光纤光栅解调仪监测的波长数据和测斜仪的结构参数,经过运算拟合得到位移和形变数据。
软件界面如图14 所示,该软件具有如下几个方面的功能。

图14 软件界面显示测量横向形变情况Fig.14 Software interface for measurement of lateral deformation
1)采集光纤光栅测斜仪的波长数据并显示输出;
2)图形显示测斜仪光纤光栅光谱;
3)图形显示测斜仪各测点的横向位移或形变;
4)具有实时数据存储能力;
5)提供声、光、电信号预警和报警功能。
4 视频监控功能模块
视频监控摄像头对监测范围实时监控。在出现落石等危害侵入物时,获取并保存现场的影像或视频数据,使得远程监控中心能及时根据报警信息确认危险及备查;同时提供控制接口,允许远程监控中心实现远程相机控制及视频实时显示。在方案设计中,可在坡体上方和坡体侧面分别布设监控点,对边坡和路面进行实时监控。视频监控单元选用高清网络摄像机,对监测范围进行全天候24 h 监控,为险情判断提供直观的依据。视频监控的主要技术参数如表7 所示。

表7 视频监控单元主要性能参数Tab.7 Main performance parameters of video monitoring unit
5 GNSS同步功能模块
同步功能模块由一个同步控制授时单元和多个同步控制接收单元组成。控制授时单元为同步“基准”节拍产生器,它的时间基准信号来自于GPS、GLONASS、北斗接收机接收到的卫星信号。同步控制接收单元的时间基准来自于同步控制授时单元,由配合自身的高稳晶振在短周期内的时间频率保持输出得到一个稳定的周期性变化的唯一时间节拍(见图15)。

图15 同步功能模块原理示意图Fig.15 Schematic diagram of principle of synchronization function module
5.1 同步控制授时单元
同步控制授时单元使用GNSS 接收机,采用GPS、GLONASS、北斗接收天线,接收GPS、GLONASS、北斗卫星授时信号,授时信息通过RS422/485 发送给接收单元。主要技术参数如表8 所示。

表8 接收天线主要技术指标Tab.8 Main technical indexes of receiving antenna
5.2 同步控制接收单元
同步控制接收单元同时接收授时数据和同步脉冲信号,通过时钟同步算法的处理完成系统时间的同步,同步时间可达到0.05 s。
6 现场监控中心
现场监控中心由数据存储单元、报警控制单元、保障单元等组成,安装在监测现场,监控各激光扫描监测功能模块的报警信号,存储监控摄像头的高清影像数据,根据报警信息控制各报警装置进行报警。本方案中根据现场情况将现场控制中心布设在激光扫描监测功能模块同一侧。
6.1 数据存储单元
数据存储单元实时获取各功能模块的状态和报警信息,存储落石险情报警期间的激光扫描仪数据,并使用硬盘录像机存储视频影像数据。
6.2 报警控制单元
现场监控中心根据激光扫描监测功能模块的报警信息,在确定出现险情时以无线列调语音报警方式、报警灯报警方式、远程终端报警方式和短信报警方式向相关人员发出报警信息。在监测现场无有线网络的情况下,支持通过4G/3G 无线网络进行报警。该单元采用多种报警手段相结合的方法,保证报警信息及时、准确的传递。
7 监控中心
监控中心由服务器与监控中心网络软件构成。其基本模块为现场监测数据实时显示模块、报表统计与打印模块、用户管理模块、现场设备参数设定模块、系统状态监测模块、报警信息显示模块、无线4G/3G 通信模块等。
现场监测数据实时显示模块:在监控终端显示现场的实时情况。
报表统计与打印模块:记录系统的预警、报警信息等,并进行统计和打印。
用户管理模块:实现对用户的权限进行管理,并记录用户登录情况。
现场设备参数设定模块:实现对现场设备参数的远程设置,使系统的运行和维护更加方便快捷。
系统状态监测模块:监控系统状态,及时对损坏的设备提出检修警示,保证系统的正常运行。
报警信息显示模块:出现报警时,监控终端弹出报警信息并触发安装在监控中心的声光报警装置提醒值班人员。
无线4G/3G 通信模块:通过无线4G/3G 通信网络与现场控制中心进行通信,在无有线网络或有线网络异常的情况下启动。
8 结语
基于激光雷达技术、光纤光栅传感技术、视频监控技术和GNNS 时间同步技术,构建了针对隐患较多的边坡路段进行智能监测和预报警的综合系统。该系统应用于广西百色田靖线K31+800 km 处的路侧危险边坡的主动防御与被动监测,保障行车安全,减小灾害损失。本系统的系统功率 < 0.45 kW、系统断电续航 > 3 h、报警时间 < 10 s、漏报率0% 、年误报率 ≤ 20% 、系统时间同步精度≤ 0.05 s。本系统采用高度防护结构,机柜可防雨防尘、风冷散热;使用了精密调平装置,调整结构操作简便,调整精度可达0.003°;其数据传输多样化,既可以利用路侧现有的光纤,也可使用无线信号;系统安装简便、易于维护、易扩展,不影响铁路原系统的正常工作;能够准确报警,能够有效排除行车、行人、动物的干扰;可全天候24 h 不间断运行,不受极端恶劣天气的影响。
猜你喜欢
大学物理(2022年7期)2022-07-26
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
电子制作(2019年24期)2019-02-23
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年23期)2017-02-02
北方交通(2016年12期)2017-01-15
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年21期)2016-10-18
