无人驾驶背景下降雨对城市交通信号控制的影响研究
2020-04-29 10:55安喜才梁士栋陈玉蓉
智能计算机与应用 2020年2期
安喜才, 严 凌, 梁士栋, 陈玉蓉
(上海理工大学 管理学院, 上海 200093)
0 引 言
随着经济全球化与科技的发展,汽车行业进入了一个新的发展时期。2013年以来,国际知名汽车企业之间开启了一场无人驾驶汽车的研发竞赛,一些企业研发的无人驾驶汽车相继亮相,并宣称10~15年实现量产[1]。无疑无人驾驶汽车是汽车行业发展的不可阻挡的趋势,随着科技的不断进步将实现V2X。新的技术只能增加交通的安全性与便捷性,却并不意味着“无人驾驶汽车+车联网”就可以解决现存的所有的交通问题。汽车科技的进步以及城市的快速发展对道路运行提出了更高的要求,雨雪等不利天气会使交通运行环境产生巨大变化[2-4],即使得对交通影响的相关研究显得尤为重要[2]。无人驾驶车辆会根据不同降雨强度对应的路面摩擦系数按照符合人类驾驶时降雨-速度反应模型自动调节车速,当信号控制不能同时响应交通环境的变化时就会造成交通供需的失衡,造成延误、排队、绿灯空放等。传统的定时式信号配时方案便会造成这种情况。故无人驾驶情况下降雨时的交通信号控制优化具有重要的意义。
目前对高速公路雨天控制管理情况的研究比较多,主要集中在定量分析雨雪天气对交通流参数的影响方面,提出了可变限速等对策[5]。对城市内部交通的控制管理研究的也有不少[6-7],已有不少学者就降雨等恶劣天气对交通流特性的影响进行了研究,并取得了不错的成果。在降雨对速度以及通行能力的影响方面,龚大鹏等人[6]通过研究发现,在夜间降雨强度达到中雨及以上时,快速路、主干路、次支路的速度下降百分比分别为:8.8%、4.8%、5.9%,并得出夜间、高峰和平峰时降雨强度与行程速度下降之间的关系。林志恒等人[7]应用多层线性模型(HLM),研究了降雨强度对城市道路交通流平均行驶车速的影响。曾伟良等人用Spearman相关系数和Pearson相关系数描述了降雨量和速度变化的关系,认为降雨造成部分路段车速降低,降雨量与速度变化量之间的相关性不明显。Lam等人[8]通过研究降雨强度对交通流的影响,提出并标定了基于降雨强度的速度—流量和速度—密度关系模型。李岩等人[9]通过引入降雨修正系数,建立了单点交叉口交通信号配时方法,用改进的定时控制方案效果较好,车均延误比原方案降低13%~25%,并可在临近饱和与过饱和状态时推迟锁死状态的产生,车均延误最低。
综上所述,多数学者都是从有人驾驶的角度去研究交叉口信号控制的,但是无人驾驶背景下降雨对城市道路交通信号控制的影响却还有一些新内容亟待深入探究。本文通过分析降雨对路面摩擦系数、车速、车头间距等的影响,对于无人驾驶汽车的运行环境要素指标进行了运算得出修正系数。通过流密速之间的关系推出降雨对交叉口信号控制的影响关系。对此进行分析研究的路线如图1所示。
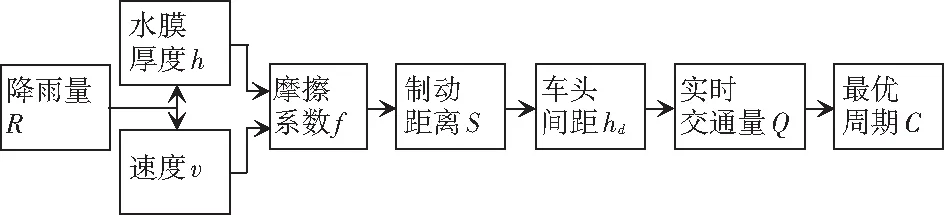
图1 研究路线
1 降雨对城市道路行车环境的影响
降雨对城市道路交通流所产生的影响主要表现在3个方面[10],对此可表述为:
(1)改变了驾驶员的驾驶行为,降雨天气使驾驶员视野视线变差,使驾驶员的行为变得谨慎,从而改变了车辆的跟驰行为。
(2)对交通流运行的通行能力和出行效率造成了不好的影响。
(3)降低了交通运行的安全性,降雨在地面形成一层水膜使地面摩擦系数降低[10],如果不减速会出现制动距离增加,可能会出现交通事故[11]。
有研究认为降雨天气引发的交通事故是一般天气的2~3倍,尤其是降雨发生在一段干燥天气后危险性更大[3]。对于无人驾驶汽车同样存在着上述问题。无人驾驶车辆自动实时检测降雨量,从而自动匹配相对应的速度。同时,如果视距不够,而车速过快,则可能引发交通事故。
1.1 降雨强度的等级标准
通常情况下交通量都是以小时为单位进行计量的,如果降雨强度比较大,同时把降雨量也按照小时进行计量的话,交通信号控制的变化势必会发生迟滞,所以本文计量雨量取半个小时为计量单位,直接取平均值进行计算,即检测半个小时的降雨量乘以2作为小时降雨量,可得表1。当降雨持续半个小时,交通控制信号就可以对降雨及时做出响应。
表1 降雨量等级划分标准
Tab. 1 Criteria for grading rainfall mm
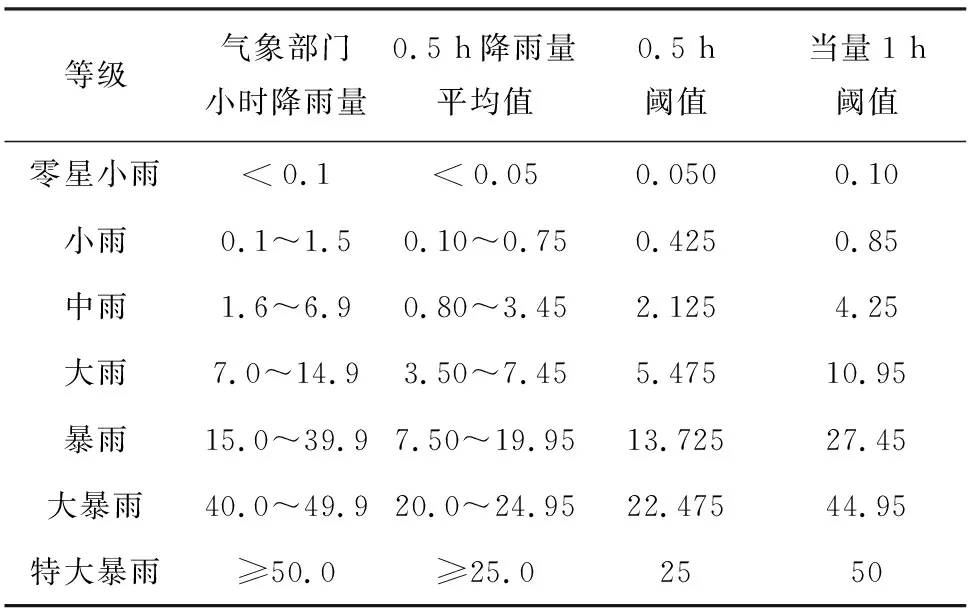
等级气象部门小时降雨量0.5 h降雨量平均值0.5 h阈值当量1 h阈值零星小雨<0.1<0.050.0500.10小雨0.1~1.50.10~0.750.4250.85中雨1.6~6.90.80~3.452.1254.25大雨7.0~14.93.50~7.455.47510.95暴雨15.0~39.97.50~19.9513.72527.45大暴雨40.0~49.920.0~24.9522.47544.95特大暴雨≥50.0≥25.02550
1.2 降雨对无人驾驶车辆视觉感知的影响
当有人在驾驶车辆时,80% 的环境信息来自于驾驶者的视觉感知。目前无人驾驶车辆感知周围的环境的方法有超声波传感器、红外线传感器、激光雷达、毫米波雷达、微波雷达、立体视觉摄像机等。无人驾驶汽车行驶通常需要对行驶环境进行检测,提取路面信息,检测障碍物,并计算障碍物相对于车辆的位置[12]。其中,主动传感系统,如激光雷达或毫米波雷达在驾驶环境障碍物检测中显示了一些良好的性能。激光雷达通过发射激光束并计算发送和接收的时间差来测距,提供了高精度的测量结果,但对恶劣天气,如雨、雾、雪等较为敏感。毫米波雷达通过检测反射波来测距,即使在恶劣天气也能提供足够的精度;但也有缺点,通常来说毫米波雷达视场较小,侧向精度相对较低[1]。与雷达相比,视觉系统视场宽,侧向精度高,成本低,而且还是被动传感器,相对来说,不受其他传感器影响,能够提供亮度和深度信息,因此可用于距离和速度检测。
虽然降雨对视频识别也有一定的影响,但是可以通过视频降噪等处理来提高视频的清晰度。然而视频识别也有缺点,比如单目测距精度不够,当测量距离达到100 m时甚至可产生10%的误差[13]。双目测距目前技术并不完善。但是总体来说,基于视觉的高效、低成本的环境感知将成为无人驾驶汽车未来产业化的主要方向。
1.3 降雨对车速的影响
公路通行能力手册(HCM2000)中提到,当不存在可见度问题时,潮湿的路面对速度没有特别的影响。这表明小雨对速度没有多大的影响,除了下雨持续时间太长以致路面上有大量积水的情况。另一方面,大雨将直接作用于可见度,同时高速公路交通研究已经证实:大雨对交通流有着明显的影响。
下小雨,观测到自由流速度降低2.0 km/h。在流率为2 400辆/h,晴朗的天气时,运营速度为89~95 km/h,而在下小雨时,运营速度减小到大约82 km/h。在小雨的天气条件下,对交通流或通行能力的影响很小。
在大雨天气下,自由流速度下降5.0~7.0 km/h。结果显示,流率在2 400辆/h 的情况下,晴朗的天气下,速度分别为 89 km/h和95 km/h 的交通,受大雨的影响,速度由89 km/h和 95 km/h降低到76 km/h和79 km/h,可以看出分别降低13 km/h和16 km/h。此外最大流率也受大雨的影响,相对晴朗天气条件下的观测值来说,大雨天气使最大流率降低14%~15%。
本文以Ibrahim等人[14]得到的结论数据进行拟合,用速度下降百分比表示速度修正因子Fs,拟合降雨强度—速度修正因子曲线得到线性回归方程为:
Fs=0.006 7X+0.073,
(1)
根据式(1)可以推出速度与修正参数之间的关系为:
Vy=V(1-Fs).
(2)
其中,Vy为降雨天预测速度;V为正常天气时速度;X为降雨强度;Fs为不同条件下速度修正因子。
由于这是驾驶员驾驶车辆时的速度变化模型,比较符合人类在降雨时行车的自身感受习惯,故从乘客的感受以及安全角度来考虑[15],本文以此作为无人驾驶汽车在降雨时的速度修正系数。城市道路车辆行驶速度较低,利用上述公式(1)~(2)对10~60 km/h范围的车速在Matlab上进行计算,可得不同降雨量与速度之间的变化关系。
1.4 降雨对摩擦系数的影响
东南大学季天剑根据中国路面结构情况(分析的对象是高速轿车子午线轮胎模型, 规格为225/50R16 92V),利用回归分析得到降雨强度与水膜厚度的回归方程[11, 16]:
h=0.128 5×l0.617 5×i-0.314 7×q0.778 6×TD0.726 1(R2=
0.93),
(3)
其中,h为水膜厚度(mm);l为坡长(m),本文中城市道路视为平坦路面,无坡度;i为坡度(%);q为降雨强度(mm/min);TD为构造深度, 道路表面的构造深度,本文取0.8 mm。
现对坡度为0.03 , 坡长(排水长度)为15 m情况下的降雨强度对水膜厚度的影响进行计算分析。
回归分析得到附着系数与水膜厚度和速度的经验关系式为[16]:
f=0.945 8-0.005 7V-0.011 8h(R2=0.93).
(4)
其中,f为不完全滑水时附着系数;V为行车速度(km/h);h为水膜厚度。
随着降雨强度的增大,轮胎与地面的摩擦系数呈现总体下降趋势,不同的降雨强度对应不同的摩擦系数,在10~60 km/h的车速范围内由式(2)计算得出不同降雨强度与路面水膜厚度之间的数据关系变化趋势如图2所示。
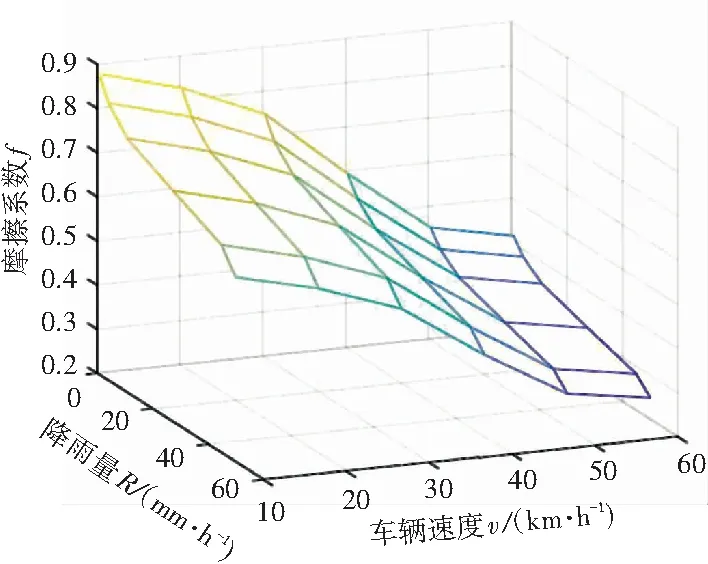
图2 摩擦系数随降雨强度和车速的变化图
Fig. 2 Diagram of friction coefficient that changes with rainfall intensity and vehicle speed
2 降雨对交通流量的影响
2.1 降雨条件下车头间距的变化
当汽车刹车轮胎抱死时,汽车刹车距离与质量无关。从能量守恒可以得到摩擦力对物体做的功等于物体动能的变化量,即:
(5)
其中,N为车对地面的压力,等于车的重力N=F=mg(由于城市车辆速度较慢,故水膜对车辆向上的作用力忽略不计);f为车轮与地面的摩擦系数;S为制动距离;M为车的质量;v为车速。
(6)
车头间距变化百分比为:
(7)
根据前文公式可以推出车头间距与修正参数之间的关系为:
hdy=hd(1+Hj).
(8)
其中,hdi为雨天不同车速下的车头间距;hd为晴天车头间距;hdy是修正后的车头间距;Hj为车头间距与修正参数;其余符号意义同上。
2.2 降雨条件下的交通流模型
(9)
雨天车速降低为v=βvi,车头间距变为hd=αhdi。设雨天能通行的交通量为Q*i,则有:
(10)

(11)
其中,Q*i为雨天交通流量;γ为交通流量变化率;S为饱和交通流率。
2.3 降雨对信号控制周期的影响
(12)
其中,L为每周期总损失时间,Y为关键相位流量比。
由公式推导可知降雨会导致通行能力变化,进而会导致该区域的信号周期与交通需求不能相匹配。
3 典型案例分析
本文选择一个常规两相位交叉口(均为单车道)为例进行分析,可以从中得到降雨条件下和非降雨条件下的交通变化模型。以晴天的数据为基准,计算得到交叉口信号控制周期。紧接着考虑降雨条件下车速,路面摩擦系数等的变化得出雨天的信号控制模型,再利用Matlab编程运算得出数据并进行分析。
两相位信号交叉口如图3所示。各进口道交通流量和饱和流量见表2,绿灯间隔时间为7 s,黄灯间隔时间为3 s,启动损失时间为3 s,交叉口设计饱和度(v/c)为0.9。其中,南北向为主干路,东西向为次干路。
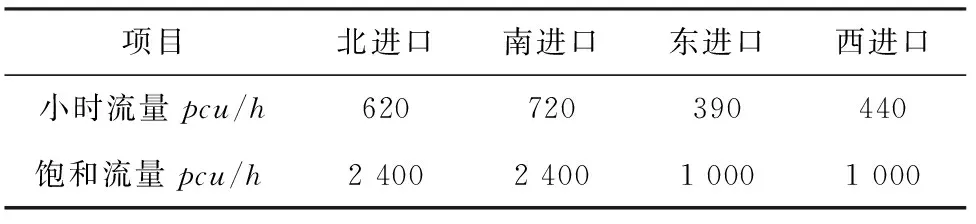
表2 交叉口各进口道流量及饱和度
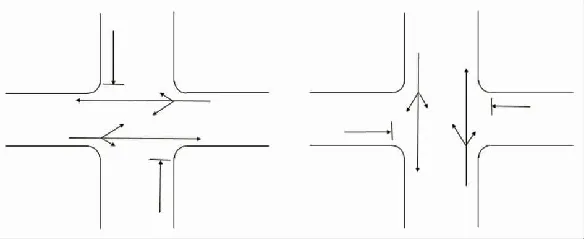
(a) 第一相位 (b) 第二相位
3.1 晴天情况下信号控制周期时长
交叉口晴天时的信号控制分析的研发步骤分述如下。
Step1各进口道流率及关键车道组选择。首先对各进口道流率进行计算,即用进口道小时流量除以对应进口道饱和流量,计算结果见表3。根据计算结果及交叉口信号相位设置,选择关键车道组。
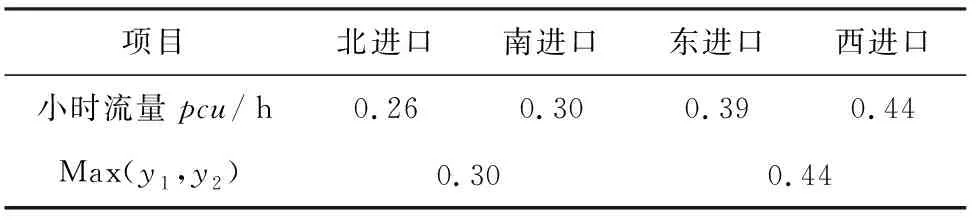
表3 各进口道流率及关键车道组
Step2每周期总损失时间。具体公式为:
(13)
Step3周期时长计算。由韦伯斯特法得:
(14)
3.2 不同降雨强度下信号控制周期时长的变化
降雨对行车环境造成的影响程度,取决于降雨强度。无人驾驶汽车的车辆的降雨量感受器对降雨量进行实时监测,根据相关计算公式得出降雨量的大小,实时推出地面摩擦力的变化,根据安全制动距离原则调整其车速。车速、车头间距的变化导致交通流量变化,造成交通控制信号与交通需求不匹配。
由车速修正系数β和车头间距变化系数α可以计算得出γ的值,得出随着降雨量的增大交通量也在发生变化,根据前文数据以及公式,通过Matlab编程运算可得不同降雨强度下对应速度的交通流量。数据变化结果见表4。不同降雨量与信号周期时长的数据关系见表5。
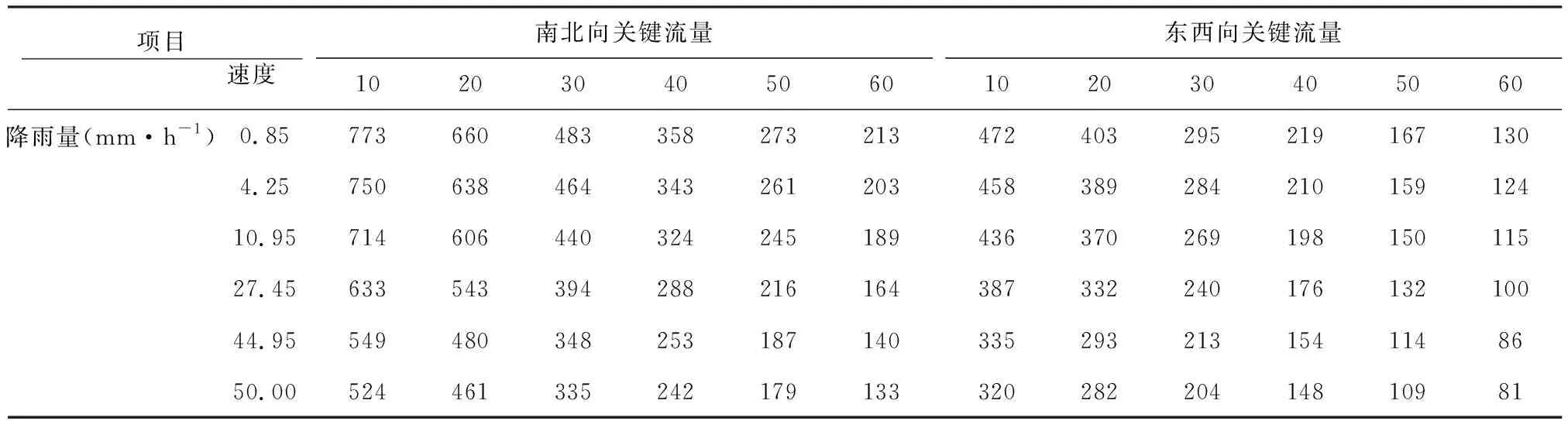
表4 不同雨量情况下对应的交通量流量变化表
注:表中的速度为假设的初始速度,考虑降雨量后对每个初始速度进行修正,从而得到不同速度下修正后的交通量
表5 不同降雨量与信号周期时长的关系
Tab. 5 The relationship between different rainfall and signal period length s/周期
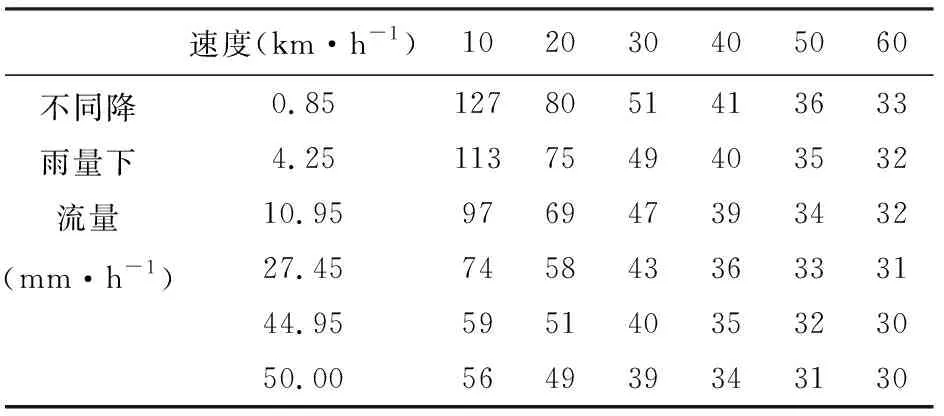
速度(km·h-1)102030405060不同降雨量下流量(mm·h-1)0.854.2510.9527.4544.9550.0012711397745956807569585149514947434039414039363534363534333231333232313030
3.3 结果分析
为了验证模型的效用,通过分析降雨对无人驾驶汽车的行车条件的影响,得到降雨时无人驾驶车辆情景时的交叉口信号配时优化方案。在设定速度区间10~60 km/h的背景下,速度取值间隔为10,取了6组数据,降雨强度分别从小雨到暴雨,也分了6组数据,分别对下面6组数据进行分析。将数据代入公式进行计算。
当降雨强度相同时,随着假设的初始速度的增大,交通量逐渐缩减,最大缩减量高达73%左右;当假设的初始速度相同时,随着降雨强度的增大,交通量也是逐渐缩减的,但是缩减的规模远不如速度是变化量时的情形,缩减量只有31%左右。可见交通流的初始行驶速度变化对交通流量的影响很大,速度是交通控制需要考查的主要因素。同时降雨对交通量的影响也是不容忽视的。
信号周期时长的总体变化趋势是下降的,各种降雨条件下的信号周期如图4所示。
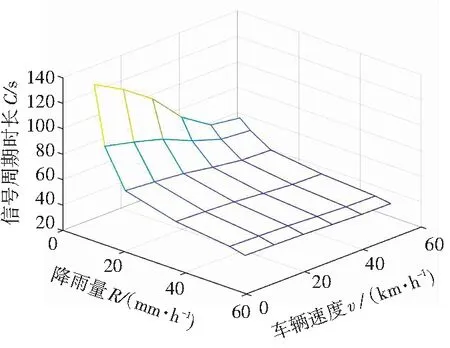
图4 信号周期随降雨强度与车速的变化关系图
Fig. 4 Relationship diagram of signal period with rainfall intensity and vehicle speed
4 结束语
本文考虑无人驾驶车辆场景,通过分析降雨对无人驾驶车辆的车速以及道路地面摩擦力的影响,无人驾驶车辆会实时根据雨量进行车速调整,得到不同的降雨强度对交通影响程度的数值。根据HCM2000中的数据,在不同雨强下速度降低的平均值,通过拟合降雨天气下速度修正趋势线,构建速度修正模型,为速度预测提供修正参考。同时再查阅相关文献求得降雨对车轮和地面之间的摩擦系数的关系式,进而分析得出降雨对无人驾驶环境下的交通控制会造成的影响。
本文得到的结论如下:在10~60 km/h的速度范围内,随着降雨强度的变化导致轮胎路面摩擦系数在0.25~0.88范围内变化,车头间距在11.91~270.55 m之间变化,通行能力的变化率在0.19~1.07之间。当降雨强度相同时,随着速度的增大,摩擦系数减小比较缓慢;当速度相同时,随着降雨强度的增大,摩擦系数急剧减小;说明影响车轮与地面摩擦系数的主要原因是降雨强度。由此证明随着降雨强度的变大,信号控制周期时长变短。
当降雨量是交通环境的变化量时,由于地面摩擦系数的降低,无人驾驶车辆的通过的流量减少,导致交通量的减少达到30%。车流量的减少随即带来信号控制周期时长的变化,进而产生降雨对城市主干道绿波控制的影响,当交叉口的周期时长与交通需求不匹配时,产生更大的延误甚至会造成二次停车,从而使干线绿波失效。因此,需要信号控制与无人驾驶车辆一样对降雨强度做出同步的反应,如此才能使信号周期与车辆同行流量相匹配。另一条路径是随着科技的进步构建车联网,实现v2x。本次研究的不足之处在于不同降雨强度下对车速的折减函数、车轮与路面之间的摩擦系数函数仍有待后续研究优化,无人驾驶车辆的跟驰距离也需做更深入的探讨研究。
猜你喜欢
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2021年23期)2022-01-05
中学生数理化·八年级物理人教版(2020年3期)2020-10-29
汽车电器(2020年9期)2020-09-30
汽车杂志(2018年6期)2018-06-25
作文周刊·小学一年级版(2017年27期)2017-08-10
消费者报道(2016年5期)2016-11-18
天津农业科学(2015年12期)2015-12-03
润滑油(2015年1期)2015-06-30