
基于改进自抗扰和遗传算法的永磁同步电机速度控制
2020-04-27 08:45张晨
科技视界 2020年5期
张晨
摘 要
為了提高永磁同步电机控制系统的抗扰动性能,提出了一种基于改进线性主动干扰控制和遗传算法参数自整定的速度控制方案。首先,建立电机模型,设计控制器对电机速度环进行控制,并加入用于补偿时间延迟的反馈环节来提高速度跟踪。其次,通过遗传算法对控制器的参数进行优化。仿真结果表明,负载转矩7N/m时,速度最大误差为7.1rpm/min;当速度从50rpm/min增加到250rpm/min时,速度达到稳态的时间为0.92s,证明改进后的控制器有效提高了永磁同步电机的抗扰动和速度跟踪性能。
关键词
永磁同步电机;补偿;线性自抗扰控制;遗传算法
中图分类号: TM351 文献标识码: A
DOI:10.19694/j.cnki.issn2095-2457.2020.05.031
0 引言
永磁同步电机(PMSM)具有高功率密度,结构简单,体积小等特点,在工业生产、精密仪器、机车传动等重要领域得到广泛应用[1]。PMSM的速度控制系统主要分为直接转矩控制和矢量控制[2]。与直接转矩控制策略相比,矢量控制的具有模型简单、控制方便、控制精度高等特点,但矢量控制需要大量数学推导和旋转坐标变换,同时参数变化会对控制精度产生较大的影响[3]。为此,众多学者提出不同的方法。文献[4]综述了自抗扰控制在PMSM伺服控制系统中的应用,设计了基于自抗扰控制的速度控制器,本文提出改进线性自抗扰速度控制器的设计方案,其关键参数由遗传算法自动优化,使得系统的动态性能处于最佳。
1 电机模型
在两相转子同步坐标系下,PMSM转子电压方程的数学模型为:
2 改进线性自抗扰速度控制器设计
对PMSM运动模型做状态空间表达:
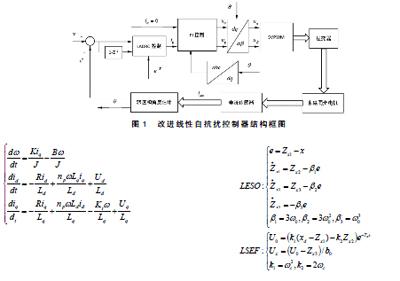
本文采用矢量控制id=0策略,系统的控制框图如图1所示。
LADRC由2部分组成:线性扩张状态观测器和线性状态误差反馈控制率,LADRC控制器如图1所示。在PMSM的速度环受负载转矩和外部扰动的影响大,采用LADRC控制器,而在PMSM的电流环受外部扰动的影响较小,沿用经典的PI控制器。
由下式看出,PMSM系统中的速度环是一个一阶系统。为了减小电压在每个PWM周期的相位延迟,定义时间延迟补偿系数,用来补偿LADRC控制器的相位延迟。LADRC速度控制器的表达式如下:
3 基于遗传算法的参数优化设计
选择LADRC速度控制器两个参数:观测器和控制器的带宽进行优化,在系统的实际状态中,观测的速度和总扰动误差越低系统的跟踪性能和抗扰动性能越好。速度误差和总扰动误差的平方根值ITAE设计适应度函数公式为:
遗传算法优化过程的步骤如下:(1)确定编码策略:将两个参数作为个体的2个基因进行浮点数编码,参数的搜索范围为[400,800]和[100,300],定义适当的适应度函数F,确保个体计算的适应度函数为正值;(2)确定遗传参数:包括选择种群大小N,交叉概率P和突变概率P随机产生初始种群,种群大小为:N=20~200,解码计算每个个体的适应度;(3)选择:采用轮盘赌方法选择当代种群中时使适应度函数小的一定数量的个体,遗传到下一代中;(4)交叉和变异:交叉即按照概率P选择两个基因进行同位置的染色体互换;变异即按照概率P对基因某些位进行取反;(5)终止条件:当遗传代数达到设定值,则算法结束,否则返回步骤(3)。
4 仿真分析
为验证提出的速度控制器的有效性,分别采用PID、LADRC和改进LADRC算法来实现速度控制。选择控制周期T=0.00025,并根据各种的参数整定原则进行整定,其中改进LADRC的控制器增益和观测器增益通过遗传算法和经验对参数进行微调得出。
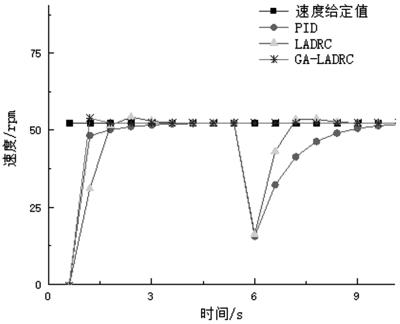
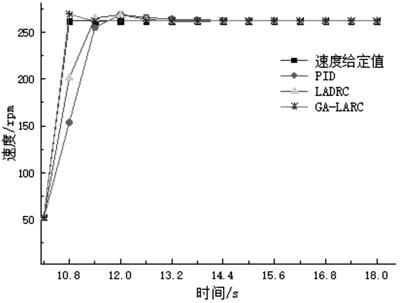
验证PID、LADRC和改进LADRC三种算法在速度控制中的抗干扰性。三种算法的抗干扰性对比如图2(a)所示,三种算法的调速对比如图2(b)所示。
通过仿真结果可知,PID、LADRC算法和GA-LADRC算法的最大误差分别为50rpm、39.5rpm和7.1rpm,PID、LADRC算法和GA-LADRC算法达到稳态的时间分别为5.6s、2.9s和0.92s,可得出GA-LADRC算法相比PID、LADRC算法的抗干扰能力最强,并且调节时间最快。
5 结语
本文提出了一种基于改进线性主动干扰控制(LADRC)和遗传算法(GA)参数自整定的永磁同步电机速度控制方案。定义补偿变量U来补偿PMSM速度环的延迟。此外,采用考虑速度误差和负载变化的遗传算法优化LADRC的参数,经过遗传算法的交叉和变异操作得出最优参数。通过仿真对所提出算法的抗干扰和速度跟踪性能进行分析,仿真表明:与传统控制方法相比,所提出的速度控制方案抗干扰能力强,跟踪性能好。
参考文献
[1]滕青芳,李国飞,朱建国,等.基于扩张状态观测器的无速度传感器容错逆变器驱动永磁同步电机系统自抗扰模型预测转矩控制[J].控制理论与应用,2016.33(5)676-684.
[2]R. SOUAD AND H. ZEROUG, “Comparison between direct torque control and vector control of a permanent magnet synchronous motor drive”[J].in 2008 13th Int. Power Electron. Motion Control Conf., IEEE Press, Sept. 2008, pp. 1209-1214,doi: 10.1109/EPEPEMC.2008.4635433.
[3]YS Choi, HH Choi, JW Jung, Feedback linearization direct torque control with reduced torque and flux ripples for IPMSM drives[J].IEEE Transactions on Power Electronics, 2015, 31(5):3728-3737.
[4]Guo,Baoling,S.Bacha,and M.Alamir."A review on ADRC based PMSM control designs"[C],Industrial Electronics Society,IECON 2017-,Conference of the IEEE, 2017.
猜你喜欢
计算机仿真(2022年8期)2022-09-28
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
中国塑料(2016年11期)2016-04-16
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
教育与职业(2014年16期)2014-01-19
舰船电子工程(2010年1期)2010-04-26
