基于PSO-MLP的点迹真伪鉴别方法研究
2020-04-27 10:10彭威,林强
舰船电子对抗 2020年1期
彭 威,林 强
(空军预警学院,湖北 武汉 430019)
0 引 言
雷达在工作过程中,不可避免地会受到外部环境的影响,在实际的雷达回波中总是包含地物、云雨、海洋等杂波。常用的杂波抑制技术是在信号处理中采取相应的措施,如动目标显示、动目标检测、恒虚警率等,但受限于杂波自身的特性、雷达平台的运动以及实际环境的复杂性等因素,无论采用哪种方法都仍难免会产生大量的剩余杂波[1-2]。这些剩余杂波经过恒虚警检测和点迹凝聚处理后,形成的虚假点迹会和真实目标点迹一起被雷达的目标提取器录取。一方面,这些虚假点迹会影响航机关联,甚至会产生虚假航迹,严重影响雷达对真实目标的正常跟踪;另一方面,虚假点迹过多会导致整个数据处理系统饱和,严重影响雷达正常的探测效能。因此,在目标检测后区分目标点迹与剩余杂波点迹,以进一步滤除杂波剩余点迹是非常有必要的。
目前,针对此问题,一些国内外的专家学者利用雷达回波特征参数做了一些相应的研究。文献[3]提出了基于杂波特性和回波信号幅度等信息判别杂波点迹的方法,通过对杂波特性的分析和回波信息的积累来滤除剩余杂波点迹。但由于杂波特性较为复杂,在实际应用中效果有限。文献[4]针对密集杂波干扰,提出了一种基于杂波图的杂波抑制方法,通过对点迹在时域和空域的密度的分析,实时判别和标识不同等级的杂波区域,然后再采用不同的杂波抑制办法进行航迹起始。以上2种算法在一定程度上滤除了剩余的杂波点迹,但都没有充分地分析杂波点迹与目标点迹的差异性。文献[1]通过对信号处理后的杂波剩余信号和目标信号提取适当的特征参数,运用K近邻算法对真实目标点迹和杂波剩余点迹进行真伪鉴别,经过真伪目标点迹鉴别处理后杂波剩余点迹抑制率接近70%。用该方法提取特征参数过程复杂繁琐,杂波点迹抑制率较低,而且在抑制杂波的同时也滤除掉了一定的目标。
本文针对目标检测过后过多的杂波剩余点迹对雷达探测和跟踪性能的影响,利用雷达点迹数据中的特征参数,提出了一种基于PSO-MLP算法的雷达点迹真伪鉴别方法。本方法在研究杂波点迹和目标点迹差异性的基础上,通过提取雷达点迹形成过程中所生成的特征参数,先通过PSO算法对MLP算法的参数进行优化选择,再运用参数优化后的MLP神经网络算法对点迹进行鉴别,进而滤除剩余杂波点迹,最后给出了杂波点迹滤除效果对比。
1 MLP神经网络
MLP(Multi-Layer Perceptron),即多层感知器,是一种趋向结构的人工神经网络,映射一组输入向量到一组输出向量。MLP有很多层,第1层是输入层,最后一层是输出层,中间称为隐含层,每一层包括确定数目的神经元。MLP的神经元采用层内无连接、层间全连接的连接方式。图1是一个双隐含层的MLP结构示意图,图中输入层共有n1个结点,隐含层1和隐含层2分别有n2和n3个神经元,输出层有n4个神经元,除去输出层,每一层均有一个偏置结点[5]。
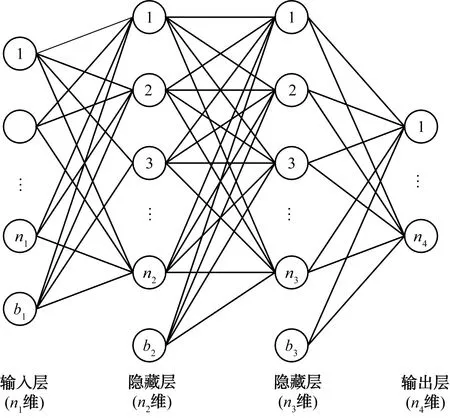
图1 双隐藏层MLP结构示意图
MLP的前馈计算过程从输入层依次计算到输出层。前馈过程中每个节点的计算方法如下:
xij=f(WiXi-1+bi-1)
(1)
式中:xij为第i层第j个神经元的值;Wi为第i-1层到第i层的第j个神经元的权值向量;Xi-1为第i-1层所有神经元的值组成的向量;bi-1为第i-1层的偏置;f为隐藏层激活函数[5-6]。
常用的激活函数有sigmoid函数(logistic函数),tanh函数,ReLU函数。在本文中用到的激活函数是sigmoid函数:
(2)
MLP算法是典型的有监督学习算法,它的损失函数定义为:
(3)
式中:h为MLP算法的输出值;y为实际值;‖…‖为任一种距离范数,通常情况下取2范数。
一般通过权值优化算法来使损失函数达到最小,本文中所采用的权重优化算法是随机梯度下降法(sgd)。计算方法如下:
(4)
另外,通过正则化方法来避免出现过拟合问题,提高模型的泛化能力。使用正则化之类的方法直接将权值的大小加入到误差里,在训练的时候限制权值变大。训练过程需要降低整体的误差,这时候,一方面能降低实际输出与样本之间的误差,也能降低权值大小[7]。正则化方法包括L0正则、L1正则和L2正则,但在神经网络中一般使用L2正则,其原理公式如下:
(5)
式中:J0为普通的损失函数;λ为一个超参数,范围是[0,1];w为神经网络中每一层的权重,这里进行的运算是对每一个权重矩阵进行了矩阵的2范数运算(即每个元素的平方然后求总和)。
由于正则化参数λ过于敏感,对鉴别精度影响较大,本文通过网格搜索法对正则化参数进行优化选择。
2 粒子群优化算法
粒子群算法,也称粒子群优化算法或鸟群觅食算法,属于进化算法的一种。鸟类等生物在寻找食物的过程中,一方面是依靠自身的探索,另一方面则是依靠伙伴相互之间的经验交流,从而能快速准确地找到在搜索区域中最好的食物源。PSO算法正是以上述生物现象作为模型而提出的一种进化优化算法。每个寻优的问题解都是搜索空间中的一只鸟,即“粒子”。每个粒子都包含有位置和速度2种信息,通过位置信息,可以计算出粒子的适应度值,从而确定粒子的优劣;而速度信息决定它们飞行的方向和距离[8]。
假设D维空间中,有N个粒子[9]:
粒子i位置:Xi=(xi1,xi2,…,xiD),xid∈[Xmin,d,Xmax,d];
粒子i速度:Vi=(vi1,vi2,…,viD),vid∈[Vmin,d,Vmax,d];
个体最优位置:pbesti=(pi1,pi2,…,piD);
全局最优位置:gbest=(g1,g2,…,gD);
其中,1≤d≤D,1≤i≤N。
则粒子i的速度和位置迭代公式如下:
(6)
(7)
式中:ω为惯性权重;c1为局部学习因子;c2为全局学习因子;r1、r2为区间(0,1)内的独立随机数。
3 基于MLP神经网络的点迹真伪鉴别算法模型
本文提出的基于MLP神经网络的雷达点迹真伪鉴别算法主要分为3个步骤:点迹数据解析、构建MLP神经网络算法模型、点迹真伪鉴别。
3.1 点迹数据解析
3.1.1 特征提取
在点迹形成的过程中,会生成很多可以区分目标和杂波的特征参数,本文通过研究对比杂波点迹和目标点迹的某些差异性,从中筛选提取了多普勒速度、点迹个数、距离跨度、方位跨度、原始幅度、背景幅度、点迹等级、点迹质量和方位向凝聚点迹个数等特征参数。
3.1.2 特征数据降维
本文筛选提取了9个相关的特征参数,特征数量较多,数据维度较高,给算法模型学习和训练带来了一定的困难,增加了算法学习和训练时间以及空间复杂度。因此,在对特征数据学习和训练前,应预先对其进行降维处理,降低特征数据的维度[10-11]。本文运用的数据降维方法是核主成分分析法(PCA)降维。
核PCA降维方法的核心思想是,通过非线性映射函数将非线性数据转换到一个更高维的特征空间L中,使数据在新的特征空间L上线性可分,再使用标准PCA降维方法将其映射到另外一个低维空间中[12]。
常用的非线性映射函数,即核函数,有多项式核函数(POLY)、高斯径向核函数(RBF)和sigmoid核函数。本文所用到的核函数是多项式核函数,其表达式如下:
K(x,xi)=[(x·xi)+1]p
(8)

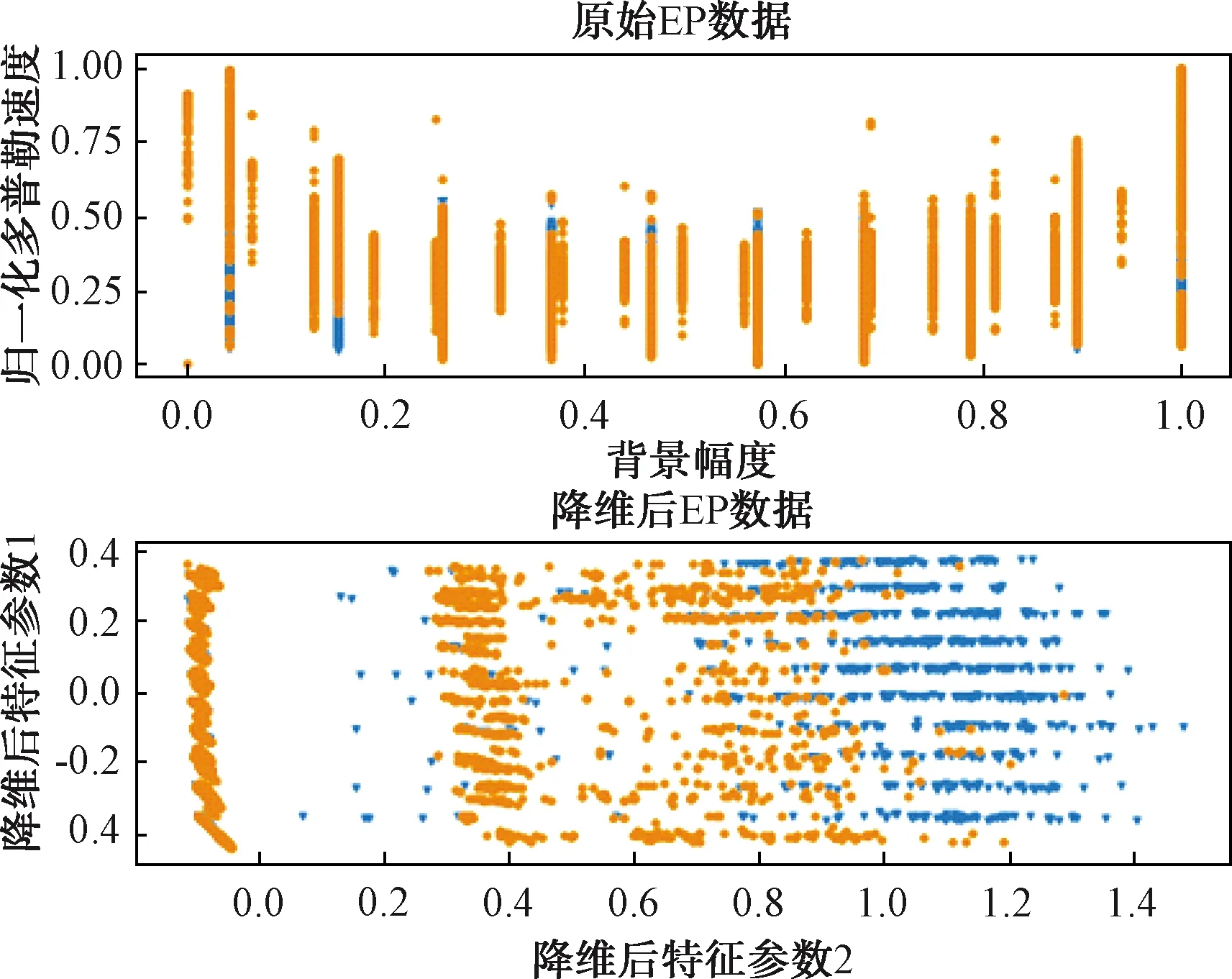
图2 点迹数据降维前后对比
由图2可知,点迹数据降维后,目标点迹与杂波剩余点迹的区分度更加明显,只有少部分混叠在一起,目标点迹与杂波剩余点迹区分度明显;而且降维后数据维度只有二维,与原始的九维点迹数据相比运算量大大减少。
3.2 MLP神经网络算法模型
本文利用PSO-MLP算法对雷达点迹进行真伪鉴别。定义粒子由参数向量λ所决定,群体中每个粒子的优劣通过适应度函数值的大小进行评价,适应度值由所选取的适应度函数和参数向量λ共同决定。本文选取雷达点迹真伪鉴别准确率作为适应度函数。
基于PSO-MLP算法的雷达点迹真伪鉴别具体步骤如下:
(1) 初始化PSO算法参数。粒子群粒子数量n,粒子维度(待寻优参数个数)m,局部学习因子c1,全局学习因子c2,惯性权重ω,算法最大迭代次数Tmax,算法收敛精度ξ,正则化参数的取值范围[λmin,λmax]。
(2) 输入训练集,利用5折交叉验证计算适应度函数值的平均值,记录、比较每一个粒子遍历过的最优个体适应度函数值和全局最优适应度函数值以及对应的参数[13]。
(3) 对粒子群中每个粒子计算后,判断是否满足迭代结束条件,若满足条件,则输出最优参数组合;如不满足条件,则利用式(6)和式(7)对粒子的速度和位置进行更新,再返回步骤(3)。
(4) 利用输出的最优参数下的MLP模型对测试集的点迹进行真伪鉴别,计算点迹鉴别准确率。
3.3 点迹鉴别
将采集好的雷达点迹数据先进行数据解析,然后通过PSO-MLP算法模型,判断其为目标点迹和杂波剩余点迹,获取鉴别准确率。本文所提的基于PSO-MLP的雷达检测点迹真伪鉴别算法流程如图3所示。
4 实验结果与分析
本次实验中用到的数据均是从X型空管雷达上采集的点迹数据。在点迹数据中随机选取训练数据9 000个,其中目标点迹5 000个,杂波点迹4 000个;另选取4 500个测试数据,其中目标点迹2 500个,杂波点迹2 000个。
实验总共分为2个部分:实验1,利用PSO算法对正则化参数λ进行优化选择,获得最优参数组合;实验2,利用最优参数下的MLP算法,对获取的雷达点迹数据进行真伪鉴别,测试点迹鉴别准确率,对比点迹鉴别前后的效果。
4.1 PSO算法优化MLP算法参数
本实验利用PSO算法优化选择正则化参数λ。利用5折交叉验证计算雷达点迹鉴别准确率的平均值,记录、比较每一个粒子遍历过的点迹鉴别准确率以及对应的参数组合,从中选取最优参数组合。
在本次实验中,MLP算法的参数设置为:正则化参数λ∈[0.000 001,1];PSO优化算法的参数设置为:粒子种群数量N=20,粒子维度D=1,惯性权重ω=0.8,局部学习因子c1=2,全局学习因子c2=2,算法最大迭代次数Tmax=50,算法收敛精度ξ=0.001。
实验结果如图4所示。
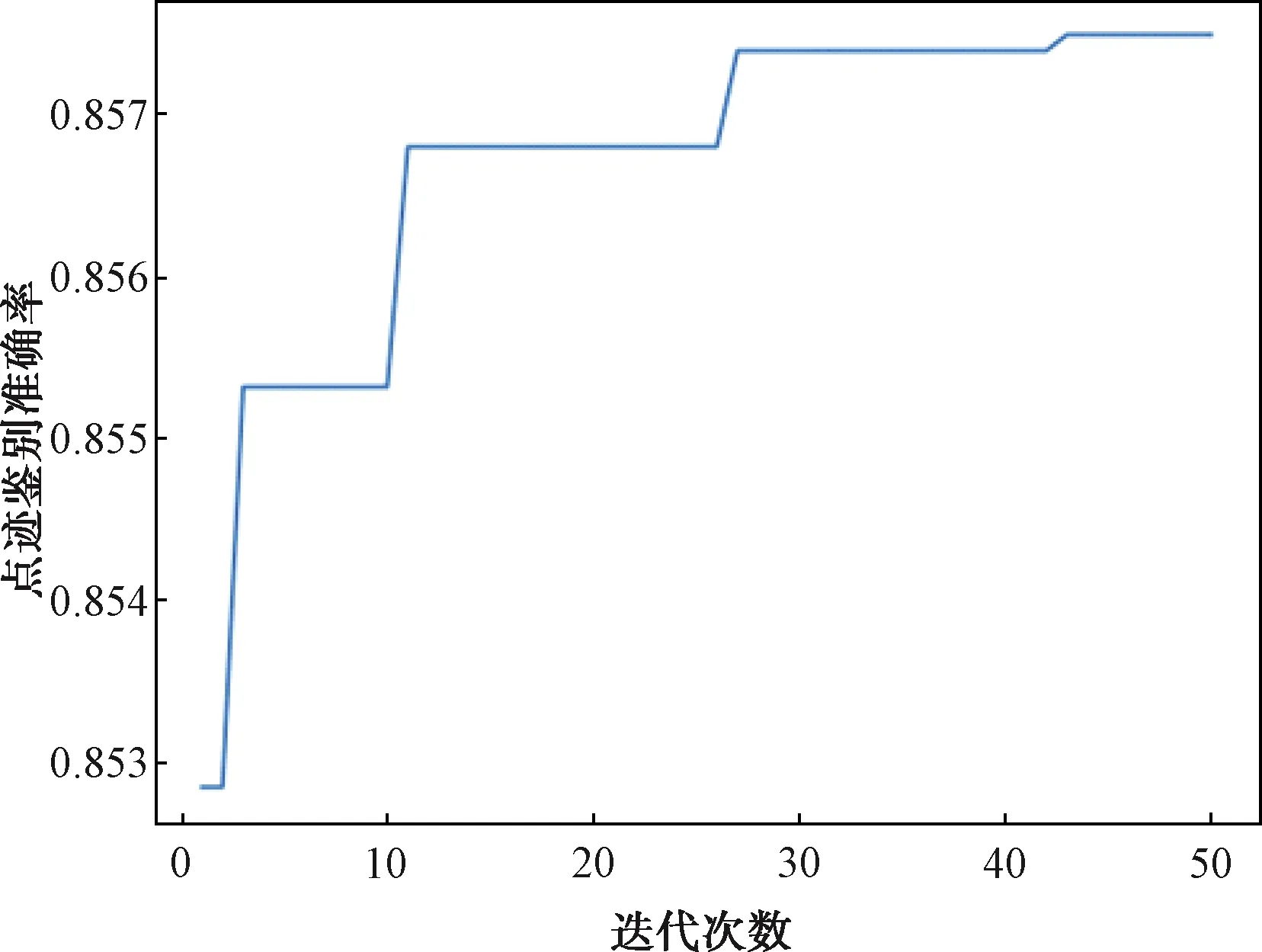
图4 点迹鉴别准确率图
由图4可知,雷达点迹鉴别准确率最终稳定在0.857 5左右。其对应的最优正则化参数λ=0.000 01。
4.2 最优参数下的MLP算法点迹鉴别分析
本实验利用最优正则化参数下的MLP算法对雷达点迹进行真伪鉴别,计算所有点迹中鉴别出的目标点迹数、所有点迹中鉴别出的杂波点迹数、目标点迹中鉴别出的目标点迹数和杂波点迹中鉴别出的杂波点迹数,对比点迹鉴别前后的效果。
其中,所有点迹中鉴别出的目标点迹数和杂波点迹数是指从4 500个点迹中分别鉴别出的目标点迹和杂波点迹的数量;目标点迹中鉴别出的目标点迹数是指从2 500个目标点迹鉴别出目标点迹的数量;杂波点迹中鉴别出的杂波点迹数是指从2 000个杂波点迹中鉴别出杂波点迹的数量。具体对比效果如表1和图5~图8所示。其中,“*”代表杂波点迹,“+”代表目标点迹。
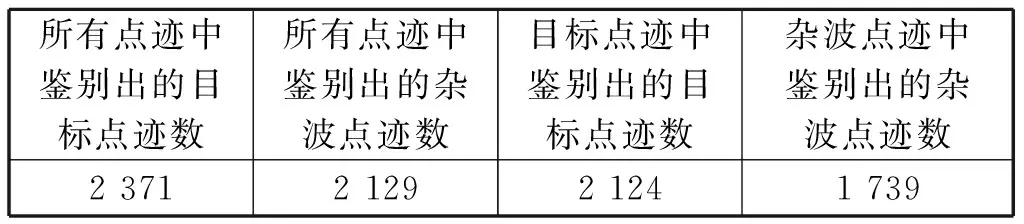
表1 点迹真伪鉴别点数对比
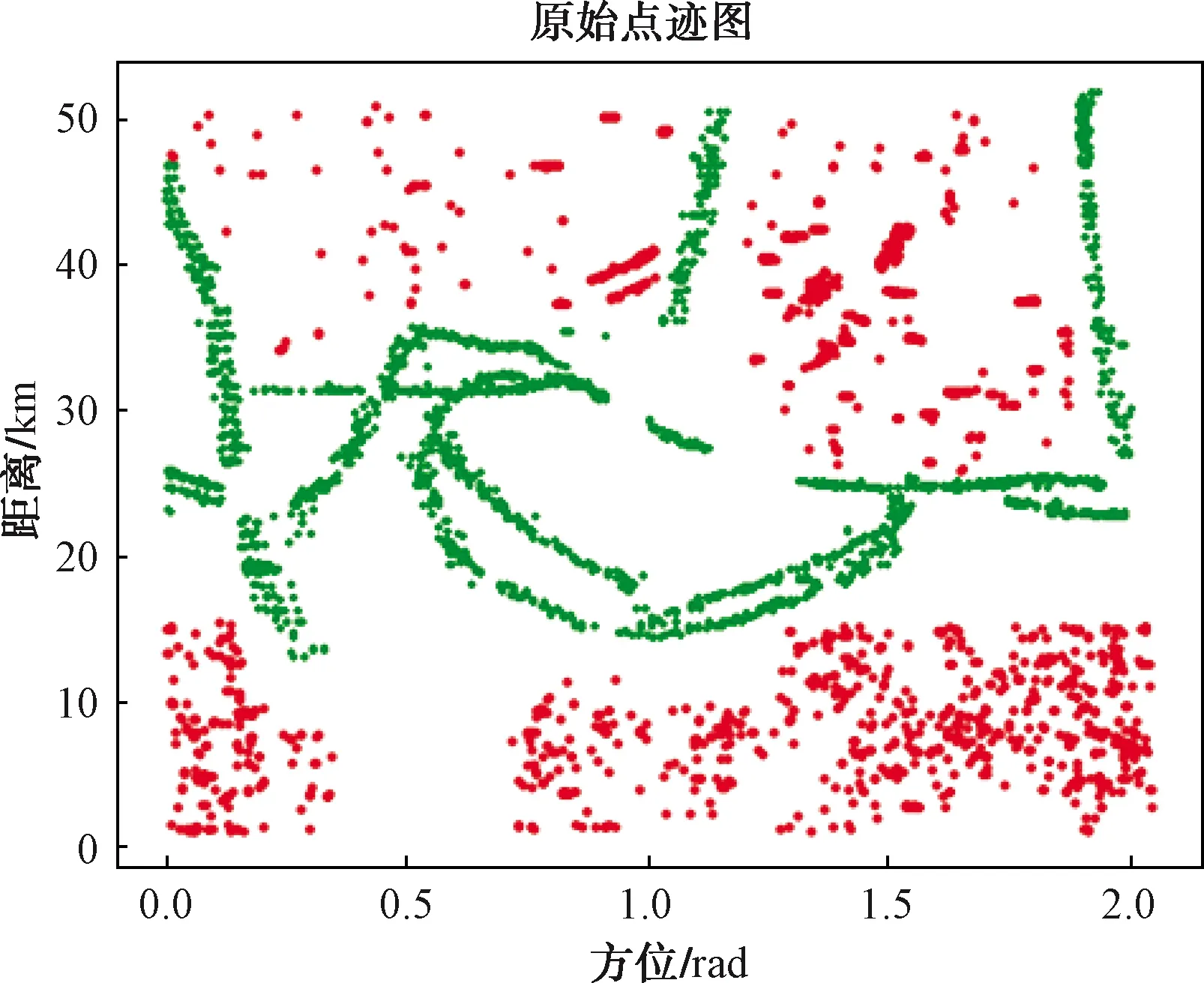
图5 原始点迹图
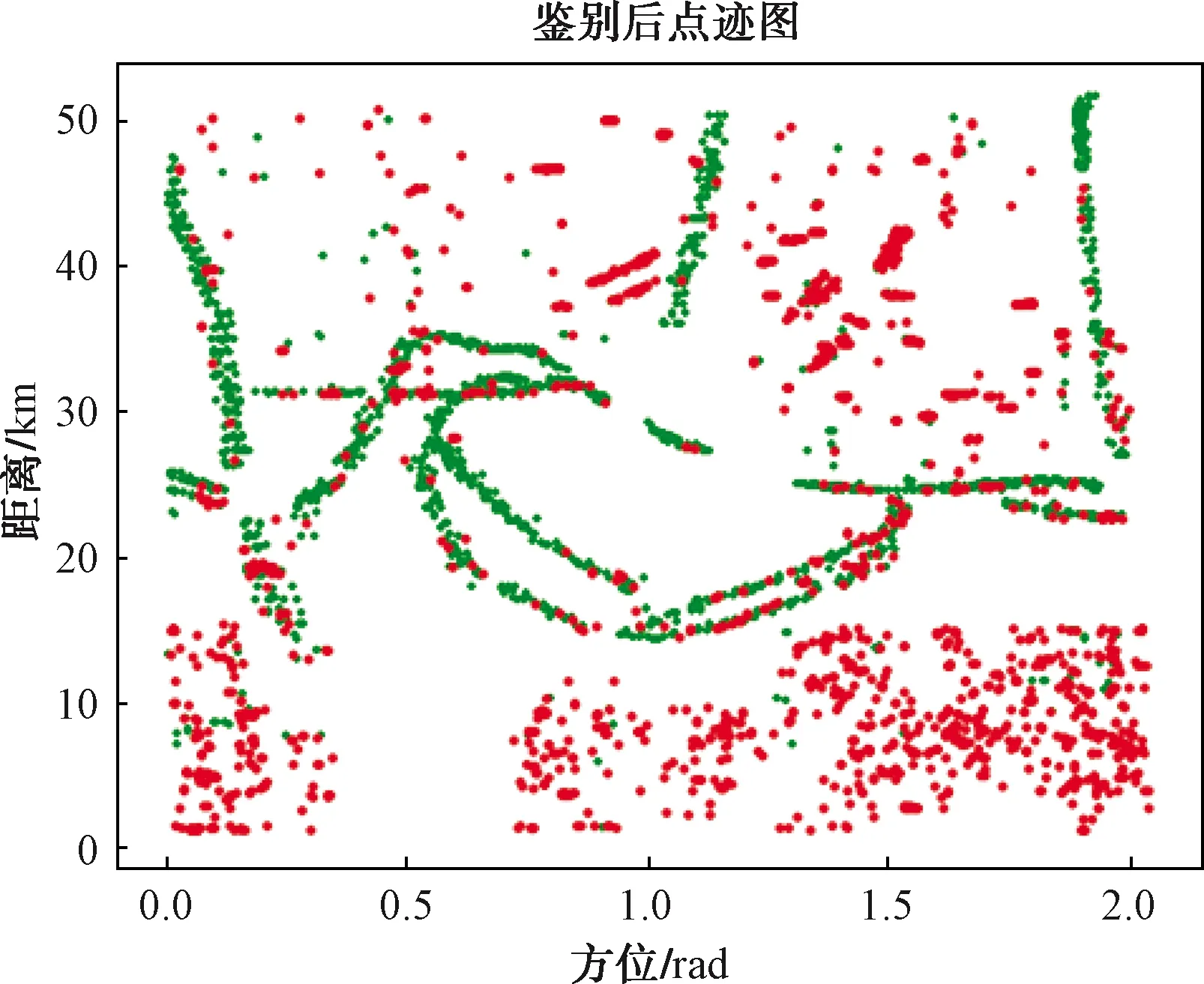
图6 鉴别后点迹图
由图5、图6和表1可知,该算法较好地将目标点迹鉴别准确,但杂波点迹鉴别准确率略低,杂波点迹被鉴别为目标点迹的个数略多。尽管有一小部分的目标点迹和杂波点迹鉴别错误,但雷达在实际工作中每帧的点迹数目有限,所以在实际中并不会影响雷达正常的跟踪效能。
由图5、图7和图8可以看出,将原始点迹中鉴别出的杂波点迹滤除后,整个点迹界面干净了许多,仅残留一小部分的杂波点迹,而且目标点迹损失较少。由此可以看出,PSO-MLP算法在雷达点迹鉴别上具有一定的优越性。
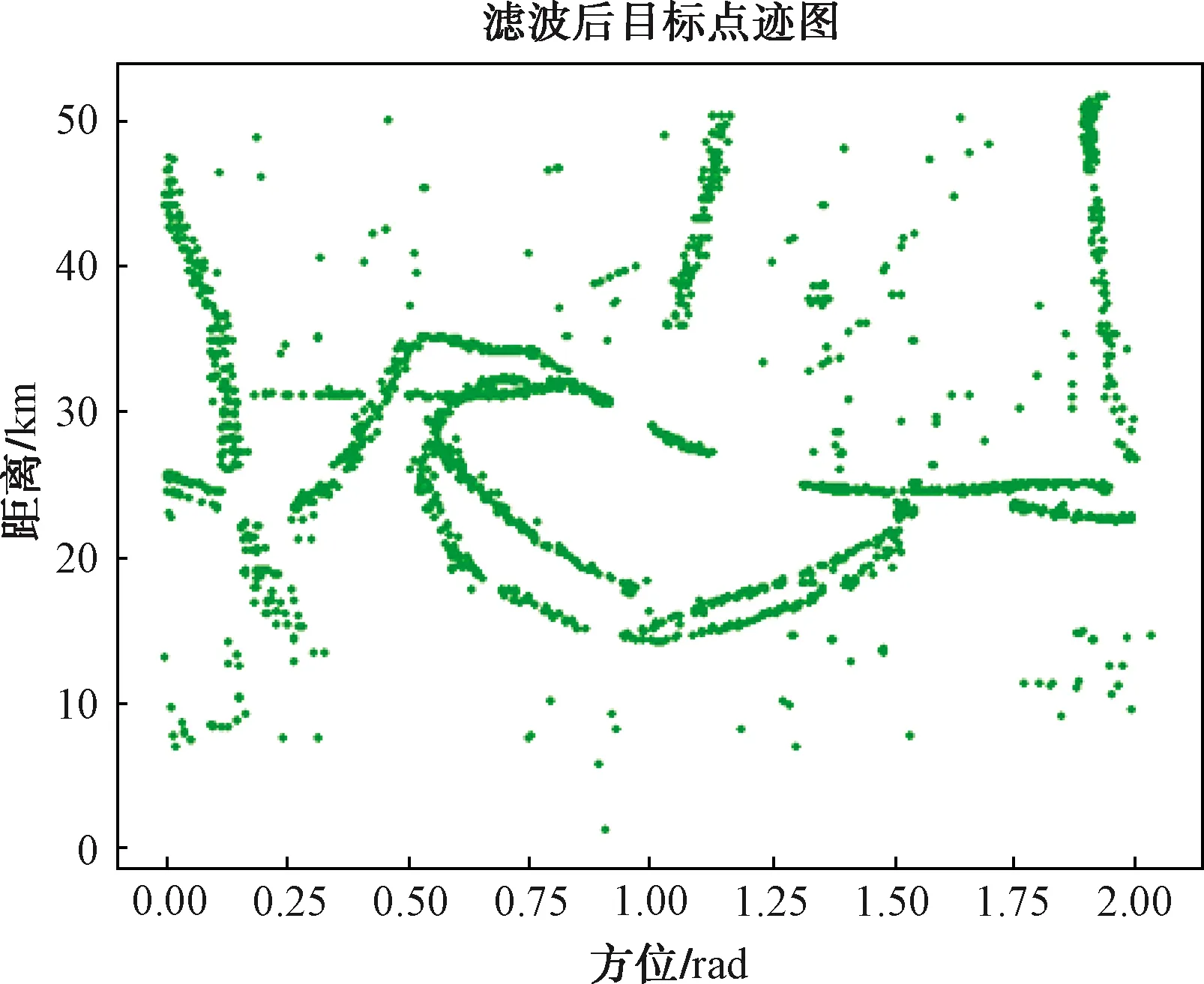
图7 滤波后目标点迹图
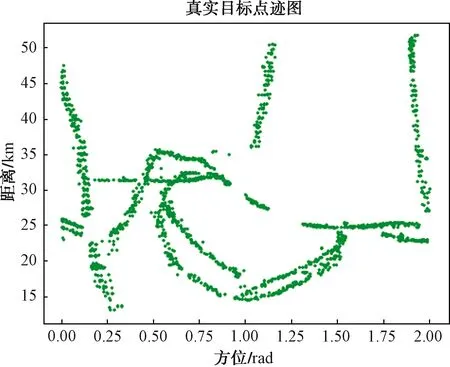
图8 真实目标点迹图
5 结束语
针对山区、海面和城市等复杂强杂波产生的杂波点迹对雷达跟踪性能的影响,本文提出了一种基于PSO-MLP算法的雷达点迹真伪鉴别方法,该方法在充分研究杂波点迹和目标点迹某些差异性的基础上,提取特征参数,利用PSO-MLP算法对雷达点迹进行真伪鉴别。实验结果表明,该算法点迹鉴别准确率达到了85.75%,剩余杂波滤除效果明显。
猜你喜欢
玉溪师范学院学报(2022年3期)2022-11-21
舰船科学技术(2022年10期)2022-06-17
成都信息工程大学学报(2022年2期)2022-06-14
舰船电子工程(2022年1期)2022-02-12
舰船电子对抗(2020年5期)2020-11-26
上海师范大学学报·自然科学版(2018年3期)2018-05-14
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
神州·上旬刊(2017年9期)2017-10-15
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年20期)2016-09-29