
电力隧道机器人巡检目标坐标定位的共轭搜索
2020-04-23 13:36王东海
吉林大学学报(信息科学版) 2020年1期
王东海,周 平,赵 轩,储 强
(南京供电公司 电缆医检室,南京 210000)
0 引 言
电力隧道是指埋置在地表下的工程建筑物,同时也是人类利用地下空间的一种形式,通过电力隧道可以专门分布电缆和电线。通过电缆隧道的应用建设能确保地下隧道电缆安全稳定地运行,减少电缆与外界环境的直接接触[1]。然而地下的环境存在较多的不稳定因素,为了提高电力隧道运行的安全性和稳定性,需要借助一定的技术手段监控处理电力隧道的实时运行情况。其中巡检是确保地下电力隧道电缆运行的主要手段之一,目前传统的电力电缆隧道的巡检方式主要依靠人工及少量环境监控器实现。其中人工巡检的巡检周期较长,存在严重的巡检误差;而环境监控器可以节省大量的巡检人力和物力,但监控器的监控范围有限,无法保证电力隧道巡检线路的完整性。为此目前使用机器人代替人类进行隧道巡检已经成为隧道巡检自动化的研究热点[2]。与人工巡检方式相比,使用巡检机器人可以实现全天候运行,且面对恶劣环境适应性较强,若在巡检过程中发生危险事故也可以有效避免人员的伤亡。电力隧道机器人巡检的目的是检测电力电缆是否存在故障及隧道环境是否存在异常,因此在机器人巡检前需要设定相应的巡检目标,即电缆线的故障和环境异常情况以及相对应的位置。通过连续搜索实现对巡检目标的坐标定位。
目前巡检机器人使用的巡检目标位置搜索算法的搜索精度较低,收敛性也较差,无法保证搜索定位结果的准确性。为了提高电力隧道巡检机器人目标位置搜索定位的准确性,笔者在传统搜索算法的基础上引入共轭梯度的概念[3]。共轭是指按一定的规律相配的一对,在实际应用过程中可以分为正常共轭、多电子共轭等多种方法。通过电力隧道机器人巡检目标坐标定位的共轭搜索算法的设计与实现,可以在保证机器人巡检完整性的同时,提升搜索的精度和收敛度,从而得到更为精准的巡检目标坐标定位结果。
1 机器人巡检目标坐标定位的共轭搜索算法设计
在电力隧道环境中,使用巡检机器人搜索指定目标的坐标位置。首先设置巡检机器人的基本搜索路径,然后根据机器人内嵌的传感器和摄像机装置识别搜索路径中的目标,当发现巡检目标时立即启动定位程序,并输出最终的巡检目标搜索定位坐标结果。
1.1 搭建机器人巡检模型

图1 巡检机器人空间坐标系
以巡检机器人的运动学原理为基础,构建对应电力隧道的巡检模型,实现电力隧道的量化处理。在搭建的巡检模型中需反映出巡检机器人的实时运动情况,同时还需要从机器人的视觉角度检测隧道中目标,因此需要分别建立两个坐标系[4]。基于{XW,YW}定义一个二维平面上的全局坐标框架,用于确定巡检机器人的位置,将机器人的集合中心作为位置参考点,定义巡检机器人的基本空间坐标系如图1所示。
在电力隧道空间中的一点Q(x,y,z)通过巡检机器人内嵌的摄像机成像设备映射到图像坐标系中,记为q0(u,v)。则可将图像坐标系中的点转换为投影平面坐标系中的表示形式,即为qp(xp,yp,zp)。因此搭建的图像坐标系上的点与投影平面坐标系之间的几何关系为

(1)
巡检机器人在目标搜索过程中会产生一定的搜索角度,产生的位姿可以表示为
(2)
其中θ表示巡检机器人的搜索旋转方向。
1.2 利用共轭算子设置机器人搜索路径
共轭梯度算子的应用原理是将搜索路径的共轭性和最速下降法相结合,利用当前巡检机器人运行梯度节点构造一组相应的共轭方向,并沿该方向生成搜索路径[5]。定义初始向量为Xi,其中参数i∈d,d为向量维数。初始向量Xi中的分向量值以及梯度信息可用

(3)
表示。设置共轭梯度算子的迭代次数为0。然后确定机器人巡检搜索路径的步长,其方法如下
(4)
其中参数k表示迭代次数,初始值取值为0。巡检机器人采集图像数据过程中,设置迭代次数最大值,以此控制搜索算法的终止条件,具体条件如下

(5)
其中变量β为共轭因子,可以通过
(6)
确定该变量的取值情况。

图2 机器人搜索路径设置结果
式(6)中由于共轭梯度算子可从已知的巡检机器人位置为起点出发,向附近一组共轭方向搜索,具有较强的局部搜索能力[6]。经过共轭梯度因子的计算与设定,生成机器人的巡检搜索路径如图2所示。
1.3 识别电力隧道巡检目标
机器人按照规划好的搜索路径进行搜索,为了保证电力隧道巡检目标的准确识别,同时保证巡检机器人搜索的精度和速度,需在图像采集过程中及时准确地获取清晰的图像[7]。在采集到清晰的电力隧道的图像后,需要在较短的时间内得出巡检目标的准确识别结果,具体的巡检目标识别过程如图3所示。
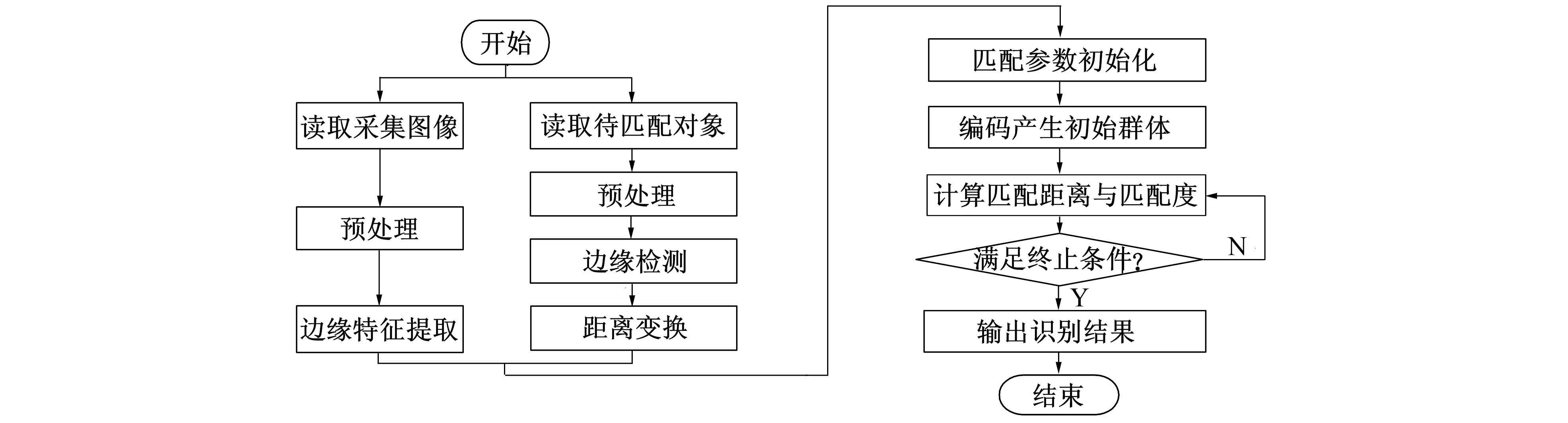
图3 巡检目标识别流程图
1.3.1 采集实时图像
实时图像采集需要依靠搜索路径上移动的巡检机器人,利用其中内嵌的光源、镜头、数字摄像机、传感器以及图像采集卡等硬件设备实现对实时图像采集[8]。使用传感器的设置与安装情况如表1所示。
通过巡检机器人内嵌的图像采集装置,实现图像的数字化。将摄像机采集到的数据按照拍摄的先后顺序排列,并标记主图像的位置和灰度,将单次搜索路径中拍摄到的巡检图像存储在采集卡中,形成采集图像集合。

表1 采集传感器分类表
1.3.2 图像预处理
图像预处理的目的是提高巡检采集图像的清晰度和分辨率,以此保证巡检目标的识别精度。图像预处理分为图像滤波降噪和图像对比度增强两步。线性平滑滤波图像降噪处理需要用相应的滤波器建造一个尺寸为3×3的滤波模板[9]。将构建好的模板在采集图像上按顺序左右、上下平移,并将模板中心与图像中的某一个像素重合。将构建的滤波模板系数与相对应图像上的像素值做相乘计算,并将得出的计算结果赋值给对应的中心像素。按照上述方法处理采集图像中的每个像素点,从而得到图像的滤波降噪结果。
图像对比度增强原理是锐化巡检机器人采集到的实时图像中的某一些特征,包括轮廓、边缘、对比度等部分。整个图像对比度增强操作分为线性变换和直方图均衡两步,首先将图像滤波降噪结果表示为f(x,y),该图像的灰度范围用[a,b]表示,则可以通过

(7)
实现图像线性变换。采用线性变换对图像每个像素灰度作线性变换,初步改善图像的视觉效果[10]。执行直方图均衡化处理,同时统计原始图像各个灰度级包含的像素数量,记为nk。原始图像的直方图计算结果如下
p(rk)=nk/n
(8)
其中rk为初始图像的第k级灰度级,n表示初始图像中像素的数量之和。利用

(9)
实现对初始图像直方图的均衡化处理。
综合滤波降噪和对比度增强的处理结果,该图像与初始图像的对比情况如图4所示。

a 图像预处理前 b 图像预处理后
1.3.3 特征提取与匹配
平滑处理预处理完成的图像,使用一阶导数算子检测图像的梯度幅值和方向,同时利用梯度幅值设定图像特征提取的抑制极大值,使用双阈值检测的方式,连接边缘特征检测结果,形成边缘特征提取结果。利用
(10)
计算提取特征与模板特征之间的相关度。其中M(m,n)表示模板特征图像。当模板特征图像与预处理结果图像之间呈线性关系时,求解η(i,j)的值为1,进而实现电力隧道巡检目标的识别。
1.4 解算机器人巡检位姿
当巡检机器人检测到目标时,立即解算机器人的巡检位置和姿态,具体解算过程如图5所示。
机器人巡检位姿的解算过程主要是对机器人当前巡检位置、旋转角度以及巡检高度的解算,将上述解算参数分别用(X,Y)、θ和H表示[11]。则机器人当前巡检位置的解算公式为

(11)
其中α为机器人的搜索路线偏移角度,N与n分别表示机器人的输出脉冲数和光电编码器的转数。构建巡检机器人移动的等效几何模型如图6所示。

图5 巡检机器人位姿解算框图 图6 巡检机器人搜索等效几何模型Fig.5 Circuit inspection robot pose solution block diagram Fig.6 The inspection robot searches for equivalent geometric models
按照图6表示的几何结构,确定巡检机器人实时位姿角度与左右轮轮速之间的关系为
(12)
其中l为左右轮之间的距离值。θ的解算结果为正数证明机器人向右旋转θ角度,否则表示向左转动。而机器人巡检的高度一般情况下为固定值,可以根据机器人本身的高度求得解算结果。
1.5 巡检搜索目标空间定位
以机器人巡检位姿的解算结果为基础,通过机器人手眼标定和目标空间坐标的测量,从而得出电力隧道机器人巡检目标坐标定位的共轭搜索算法的坐标搜索定位结果。
1.5.1 机器人手眼标定
手眼标定的目的是以机器人的图像坐标系为基础,实现图像坐标与空间坐标之间的相互转换[12]。机器人手眼标定的过程需要借助标定物完成,将标定板固定在巡检机器人机械臂的末端,通过控制器运动使标定板与内嵌摄像设备之间产生相对运动,并获取编订板的相对运动数据,从而实现对巡检机器人的手眼标定。
1.5.2 测量巡检目标空间坐标
巡检目标空间定位坐标结果以三维坐标的形式输出,输出结果如下
(13)
其中X、Y分别表示的是巡检机器人的位置解算结果,x与y分别为手眼标定后机器人采集图像中对应目标像素点的坐标。
2 对比实验分析
为了检测机器人巡检目标坐标定位的共轭搜索算法在电力隧道中的应用情况,设计如下对比实验。以巡检机器人作为实验的检测对象,通过设置电力隧道中目标节点的方式,形成搜索定位坐标节点,利用计算机设备记录巡检机器人搜索定位的巡检目标位置坐标,在将其作为原始数据输入到计算机处理软件中,经过处理与分析得出最终的对比实验结果。图7为工作人员在电力隧道中利用相关设备设置巡检目标节点。
选用市售的普通实验机器人作为实验对象,并按照图8的形式安装实验对象。

图7 实验环境示意图 图8 巡检机器人Fig.7 Image of experimental environment Fig.8 Inspection robot
将设计的机器人巡检目标坐标定位的共轭搜索算法输入到巡检机器人的内部程序中,直至搜索出所有的巡检目标节点实验结束。在实验中应用传统的目标坐标定位搜索算法作为实验的对比算法,且保证两种搜索算法使用的硬件设备以及搜索定位的巡检目标相同。
ERA(Environmental Risk Assessment)指标即环境风险评价指标,是反应搜索算法收敛性的重要数据条件,一般情况下ERA指标的值越小,证明对应搜索收敛性越高。ERA指标变化如图9所示。

图9 ERA指标变化图
通过图9中的数据可以看出,不同的搜索定位算法的ERA指标的取值结果不同,每行的右侧ERA指标均大于左侧数值。由此可见设计的机器人巡检目标坐标定位的共轭搜索算法解决了传统搜索算法中存在精度低的问题。
3 结 语
通过机器人巡检目标坐标定位的共轭搜索算法的设计与应用,充分解决了传统搜索算法中存在的精度低的问题,减轻了电力隧道巡检工作的难度,同时节省了大量的人力和物力。然而在共轭搜索算法设计的过程中,未对机器人的巡检搜索路线加入避障功能,因此在今后的研究工作中需要对其进行深入研究与优化分析。
猜你喜欢
现代电力(2022年2期)2022-05-23
数学物理学报(2022年1期)2022-03-16
数学物理学报(2021年6期)2021-12-21
数学物理学报(2021年3期)2021-07-19
军民两用技术与产品(2021年2期)2021-04-13
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
河北理科教学研究(2020年1期)2020-07-24
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
