
基于视频虚拟检测线特征的交通流参数检测
2020-04-23 01:22:46卢朝晖
电子技术与软件工程 2020年5期
卢朝晖
(浙江力嘉电子科技有限公司 浙江省诸暨市 311800)
在城市化建设速度不断加快,整体规模持续扩大的背景下,城市交通拥堵、紧张问题日益凸显。相关工作人员需要通过科学化的管理方法对道路运行展开管理,以最大限度发挥道路承载能力,缓解交通压力,改善交通环境、在这一背景下,ITS 即智能交通系统应运而生,并得到了积极的发展,在提升道路有效利用率方面发挥着非常重要的作用。而智能交通系统的应用必须以车辆以及交通流参数的可靠检测为基础,如何获取精确的交通流参数一直以来是业内人士重视的课题之一。视频检测技术发展至今已经较为成熟,凭借其实时性、稳定性、智能性等一系列优势在交通流参数检测工作中发挥着重要的应用价值。本文即提出一种基于视频虚拟检测线特征的交通流参数检测方法,并就检测步骤以及关键处理环节进行分析,仅供业内有关人员参考。
1 视频采集与目标分割
基于视频虚拟检测线特征的交通流参数检测以DV 摄像机现场采集图像资料为依据,整套系统运行前将数字视频信号转换为经压缩后AVI 格式文件并按照25 帧/秒,像素320×240 的标准保存,然后对视频文件进行处理,将所需交通流参数提取出来。在此环节工作中,为了减少计算难度,满足交通流参数检测实时性要求,可以车道2 条检测线为依据进行目标分割处理。此环节中选用基于改进的背景帧差法,通过对两帧图像差值进行计算,并与预设参数进行对比的方式,获取背景帧差参数。此过程中,将系统输入图像帧定义为Ct,将背景图像帧定义为Bt,将预设参数定义为Th(该参数能够减少采集视频图像中光线变化以及噪声对交通流参数检测结果的影响),则可以形成如下式(1)所示关系,在输入图像不含车辆的情况下,背景图像帧与输入图像帧相同,差值为0;在输入图像含车辆的情况下,背景图像帧与输入图像帧存在差值。

图1:某车道2 条视频虚拟检测线对应检测信号示意图

图2:单位时间通过车辆数量判断流程示意图

2 边缘检测
在视频图像检测装置对车辆进行进行采集的过程当中,车辆有比较丰富的边缘信息,阴影边缘较少。在边缘检测处理环节中,车辆阴影与路面阳光光线接触界限会存在一定边缘,且对图像亮度变化有较高的稳定性,对车辆识别而言是非常有利的。为满足交通流参数检测需求,在边缘检测环节中引入基于Kirsch 检测算法,该算法对于当前像素e 定义8 个相邻像素,以3 个相邻像素为A 组,另5 个像素为B 组,A 组像素以中心点e 为标准不断移位,同时以A组像素*5-B 组像素和*3 的方式,取最大值作为当前像素值。
3 形态除燥
视频装置拍摄车辆运动轨迹过程当中,需要经过包括拍摄、传输、以及格式转化等一系列处理步骤,上述环节会产生附加噪声,并且背景选取的精确性以及拍摄装置抖动等因素都可能会导致目标分割图像中含有一定非运动性噪声,因此必须对噪声进行处理,以提高交通量参数检测的精确性。本文选用3×3 结构元素,结构中每一元素均为0,元素中心为左上角。整个系统运行过程当中视频虚拟检测线像素宽度范围在4~20 间,通过实际的运行检测线宽以6~10 个像素为标准,在保证交通量参数检测质量的同时不会造成较大的运算负荷。在使用形态学运算处理图像边界时如果严格按照“当结构元素与输入图像不相交时,就不处理”的原则,那么图像的边界就没有被处理的机会,而所设的检测线的宽度相对来说很窄,处理作用不太明显。系统实现时为了取得较好的处理结果,把图像边界向外进行了复制。通过上述方式对视频检测图像进行形态除燥处理,有效抑制采集图像中的噪声干扰。
4 信号生成与参数提取
在经上述步骤处理后,所对应图像仍然以RGB 24 位格式保存,为进一步生成虚拟检测信号并完成参数提取操作,需要对每一帧虚拟检测线所对应像素值进行叠加处理,然后与检测线像素个数相除,并做归一化处理。在此过程中,将虚拟检测线高定义为h,将虚拟检测线宽定义为w,将阴影边缘去除后图像定义为Et(i,j),将虚拟检测线归一化处理后信号定义为St,则有如下式(2)所示描述关系:

同时,如图1 所示为某车道2 条视频虚拟检测线所生成检测信号示意图。交通流参数检测需提取信息包括:(1)单位时间通过车辆数量;(2)通过车辆行驶速度;(3)车道时间占有率。
(1)单位时间通过车辆数量。利用信号St对单位时间视频虚拟检测线上是否有车辆通过进行判断。当信号St>预设参数的情况下,判断为单位时间内有车辆通过,当信号St≤预设参数的情况下,则判断单位时间内无车辆通过。同时,在交通流参数提取过程中,车辆正面玻璃会在很大程度上对车辆检测信号产生影响,当其处于检测线上时,St多<预设参数。因此,编程过程中需要对最大容许错帧数进行规定,以判断车辆帧数,当满足连续判定为有车辆通过帧数>最小判定为车辆帧数的情形下,单位时间通过车辆数量+1,具体算法流程如图2 所示。
(2)通过车辆行驶速度。单位时间通过车辆数量可以利用单个虚拟检测线实现,而车辆行驶速度的判断则需要车道2 条虚拟检测线共同完成。对于某车辆而言,在经过某车道前、后所设置检测线时对图像进行采集,将进入2#虚拟检测线时所对应帧号定义为StartFrameNum2,将进入1#虚拟检测线时所对应帧号定义为StratFrameNum1,在2 条虚拟检测线间距离D 已知,并且采集视频帧率为R 的情况下,可以由下式对通过车辆行驶速度进行计算:

该式中,2 条虚拟检测线间距离D 应当满足基本条件:即任意时刻下仅存在一辆车辆,且虚拟检测线间距离应当尽量大。主要原因在于:视频虚拟检测线采集帧率基本处于恒定状态下,系统存在固有误差,为1/2R(单位:s),车辆经过2 条虚拟检测线时测量时间误差可以定义为1/2(StartFrameNum1-StartFrameNum2)。由上述分析可见:当2 条虚拟检测线在任意时刻仅存在一辆运行车辆的情况下,2 条检测线间距越大,则对应通过车辆行驶速度的检测误差越小。具体算法流程如图3 所示。
在图3 所示通过车辆行驶速度算法流程图当中,以Vehicle1 定义为1#虚拟检测线车辆计数器记录数值,Vehicel2 定义为2#虚拟检测线车辆计数器记录数值。为测定车辆行驶速度,需要同步进行计数,对于所提取数值,行驶速度测量的具体过程应当为:第一步,判断2#虚拟检测线对应车辆计数器是否+1,判断为是的情况下进入2#虚拟检测线对应帧号;第二步,判断1#虚拟检测线对应车辆计数器是否+1,判断为是的情况下进入1#虚拟检测线对应帧号;第三步,对1#、2#虚拟检测线上计数器数值是否相等进行判断;第四步,计数器数值相等的情况下对车辆速度进行计算。
(3)车道时间占有率。车道时间占有率常用于交通流密度的实际测量中,将该指标定义为某一时间范围内车辆通过某特定断面累积时间占该时间范围的百分比,可作为评估该路段拥挤程度的标准,车道时间占有率越高,则提示该路段车道车辆越多。将车道时间占有率定义为X,将检测车辆数定义为i,将第i 辆车辆所对应信任帧数定义为Crediblei,将第i 辆车所对应容忍帧数和定义为SumSufferancei,将当前采集视频帧号定义为CurFrameNum,则可以将车道时间占有率用如下式(4)所示方式表示:

5 背景选取与更新
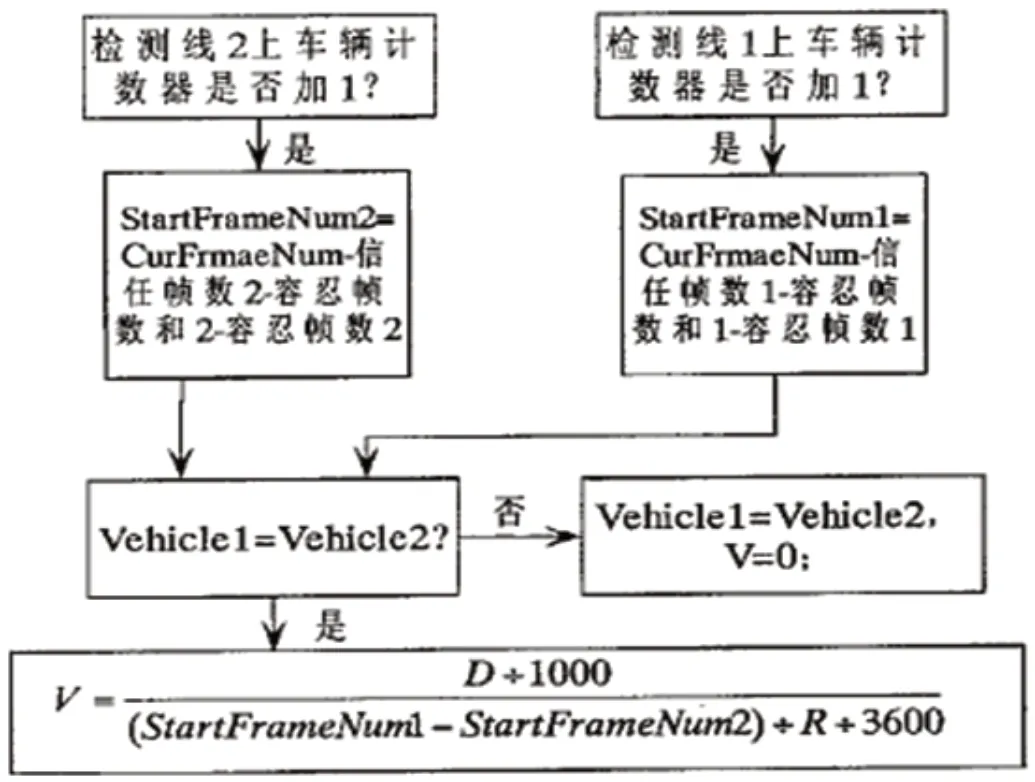
图3:通过车辆行驶速度算法流程示意图
是否能够提供可靠且准确的背景图像,这一问题直接关系到整个交通流参数系统检测的精确性水平。整套系统原始背景需要进行初始化处理,系统开启视频文件时处于暂停状态下,以第一帧图像为背景图像,但若背景中存在行人、车辆等运动目标,影响背景效果,可以连续播放视频文件,在适宜时刻将暂停图像作为初始化背景。
为能够与时间变化相适应,需在交通流检测系统中引入背景动态更新方法,以虚拟检测线为依据。考虑到基于像素更新的背景处理方法对预设参数有较高依赖性,背景更新效果偏差,一定程度上影响检测效果,且系统运行过程中存在车辆漏检或容忍帧可能性,因此算法不能简单的在满足检测线上特征量为0 这一条件时对背景进行更新,背景更新的条件应当满足:检测线特征量连续150 帧持续为0。将经更新处理后背景定义为Bt(i,j),将连续150 帧图像中第30 帧特征量定义为Ct-120(i,j),将第60 帧特征量定义为Ct-60(i,j),将第90 帧特征量定义为Ct-90(i,j),将第120 帧特征量定义为Ct-30(i,j),则形成如下式(5)所示描述关系:

6 结束语
本文上述分析中围绕基于视频虚拟检测线的交通流参数检测方法进行分析与阐述,对背景差方法进行改进,提出了可有效抑制车辆阴影边缘的具体算法,并对车辆检测信号形成方法进行研究,以满足单位时间通过车辆数量、通过车辆行驶速度、以及车道时间占有率等相关交通流参数的可靠检测,上述分析需要引起业内人士的关注与重视。
猜你喜欢
汽车工程师(2021年12期)2022-01-17 02:29:54
时代汽车(2021年18期)2021-09-17 11:51:59
当代陕西(2020年14期)2021-01-08 09:30:42
电动工具(2020年6期)2020-12-29 05:53:36
设备管理与维修(2020年2期)2020-03-24 13:12:06
贵州师范学院学报(2016年4期)2016-12-01 03:54:07
西南交通大学学报(2016年3期)2016-06-15 20:29:35
中国工程咨询(2016年1期)2016-02-14 06:47:44
数学年刊A辑(中文版)(2014年1期)2014-10-30 01:48:12
装备制造技术(2012年12期)2012-08-31 02:31:38
