
永磁同步电机双矢量模型预测磁链控制
2020-04-20 07:03:54翟良冠王家乐石懿晨温志威杨泽贤
微电机 2020年11期
翟良冠,王家乐,张 蔚,石懿晨,温志威,杨泽贤
(南通大学 电气工程学院,江苏 南通 226019)
0 引 言
永磁同步电机(PMSM)具有功率密度大、效率高、控制性能好等优点,在工业上有着广阔的应用前景。近年来,模型预测转矩控制(MPTC)以其实现简单、动态响应快、跟踪精度高等优点,逐渐被应用于PMSM驱动及其控制领域[1-3]。
传统MPTC采用定子磁链和转矩作为控制变量,需要引入权重系数来调整两者的量纲,但权重系数的调整费时费力[4-6]。文献[7]使用模糊控制集以实时更新电机运行期间的权重系数;文献[8]通过修改矢量控制集及引入占空比的方式,减小了权重系数对电机控制性能的影响。但上述方法并未消除权重系数。文献[9]和文献[10]分别将传统MPTC的价值函数替换为基于电压矢量跟踪误差和基于定子磁链矢量跟踪误差的价值函数,有效消除了权重系数。
权重系数的消除减小了调整负担,但无益于电机控制效果的提高。对于基于两电平逆变器的永磁同步电机控制系统,传统MPTC只在一个控制周期内施加一个电压矢量,从而导致定子磁链和转矩脉动较大,定子电流谐波也较大。通过设置较高的采样频率可以改善稳态性能,但也增加了计算量,同时对硬件提出了更高要求。近年来,占空比控制方式已应用于MPTC电机控制系统[8-13]。该方式将一个控制周期分为两部分,前一半作用非零矢量,其余作用零矢量。文献[11-13]采用基于占空比控制进行了异步电机驱动,实现了电机转矩脉动的减小和算法复杂度的降低。然而,一个控制周期固定非零矢量和零矢量,并不能最大限度地减小定子磁链和转矩误差。文献[14-17]中,传统MPTC中的价值函数被基于电压矢量跟踪误差的价值函数所代替,采用占空比控制,并根据电压矢量跟踪误差最小化的原理确定矢量作用时间。文献[17]提出了双矢量预测控制,第二电压矢量不固定为零矢量,而是在边界范围内选择。上述的两种方法均能实现稳态性能的改善。但由于矢量选择和持续时间不同步,其低速性能较差。此外,为了减少算法的复杂度和计算量,文献[18-19]研究了基于无差拍(DB)的MPC方法。文献[18]预先选出参考电压矢量,避免了对所有电压矢量的测试,但无法保证所选矢量全局最优,影响系统的动稳态态性能。为此,文献[19]提出了一种基于快速矢量选择的模型预测控制方法,可以实现与传统模型预测控制的等效控制效果。
本文以一台三相PMSMD电机作为控制对象,提出了一种TVS-MPFC方法。有别于传统MPTC对定子磁链和转矩作直接控制,该方法对定子磁链跟踪误差的控制,以消除权重系数;再基于无差拍及改进的双矢量占空比计算方法,改善系统稳定性,减轻传统MPTC算法的计算负担。通过实验研究,验证该控制方法的优越性。
1 永磁同步电机模型预测转矩控制
1.1 PMSM数学模型
永磁同步电机dq坐标系下的数学模型为
(1)
(2)
(3)
式中,ud(uq)、id(iq)、ψd(ψq)和Ld(Lq)分别为定子电压、定子电流、定子磁链和定子电感的d(q)轴分量;ψpm为永磁磁链;Rs为定子电阻;ωe为电角速度;p为极对数;Te为电磁转矩。
将式(2)代入式(1),求得电流微分方程为
(4)
1.2 传统模型转矩控制


(5)
式中,Te(k+1)和ψs(k+1)为分别为(k+1)时刻的定子转矩和定子磁链;kψ为磁链幅值的权重系数。
由式(5)及图1可见,传统MPTC的价值函数中含有调节量纲的权重系数,而目前该系数只能依靠大量的仿真和实验得出;同时,传统MPTC方法在一个控制周期只施加一个电压矢量,且受限于可选电压矢量数目(7个备选电压矢量),转矩和定子磁链脉动较大,稳定性能相对较差。
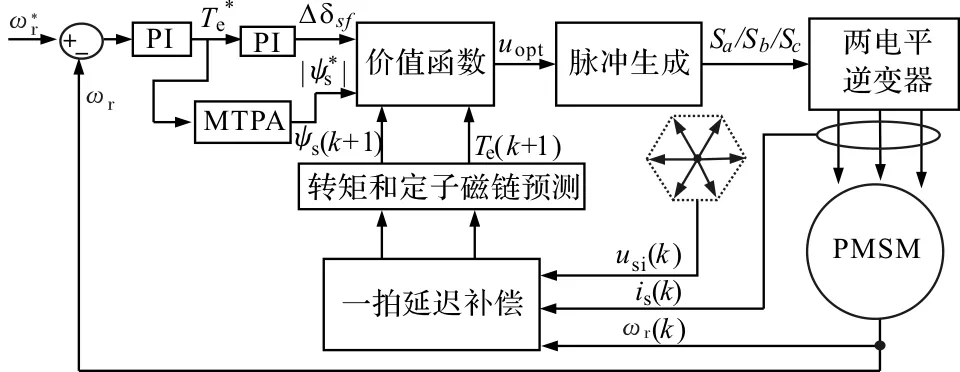
图1 基于传统MPTC的电机控制系统框图

图2 基于TVS-MPFC的电机控制系统框图
2 双矢量模型预测磁链控制
针对上述传统MPTC存在的问题,本文提出了一种TVS-MPFC方法,其系统框图如图2所示。所提TVS-MPFC方法主要不同在于定子磁链矢量参考值计算,双矢量的选择以及占空比的计算。需要注意的是,图1和图2中(k+1)时刻电流is(k+1)由采样定子电流在一拍延迟补偿[17]计算后得到,这一计算过程不再赘述。
2.1 参考磁链与参考电压相角计算
由负载角[10]定义,(k+1)时刻负载角δsf(k+1)为
(6)
式中,ψd(k+1)和ψq(k+1)分别为(k+1)时刻定子磁链的d、q轴分量。(k+1)时刻的转矩Te(k+1)和定子磁链ψs(k+1)根据式(2)和式(3)求得。
(7)
(8)
式中,KPT和KIT分别为定子磁链矢量参考值计算模块内的比例增益和积分增益。
(9)
结合式(8)和式(9),dq旋转坐标系下的磁链矢量参考值如式(10)所示。
(10)

(11)
(12)
2.2 双矢量选择

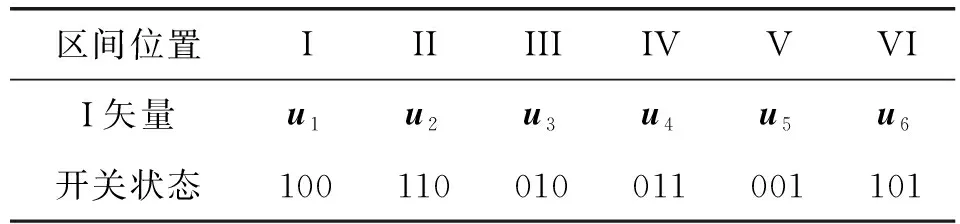
表1 最优I矢量选择表

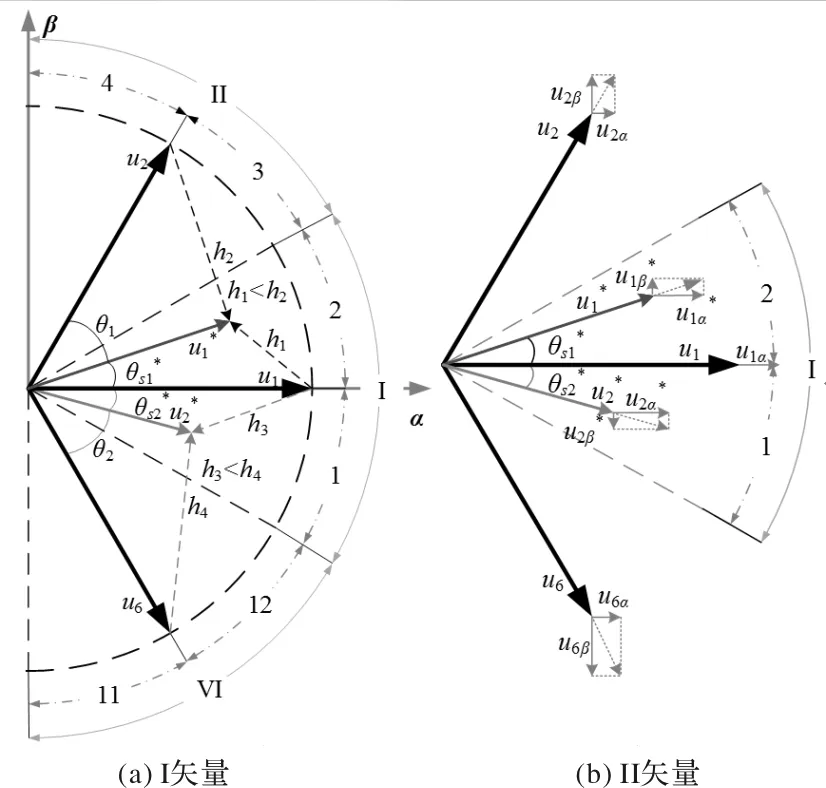
图3 矢量选择原理图

(13)
式中,Udc为逆变器直流母线电压;Sa、Sb和Sc分别为A、B和C相桥臂的上桥臂开关状态。
(14)
(15)


表2 最优II矢量选择表
2.3 占空比计算
将式(1)离散化,定子磁链矢量在dq轴的变化率如式(16)、式(17)所示。
(16)
(17)
式中,S11(S21)和S12(S22)分别为I、II矢量沿d(q)轴的磁链变化率,uid(ujd)、uiq(ujq)分别为选取的I(II)矢量沿d、q轴的分量。
所选I矢量的占空比计算如式(18),剩余控制周期作用II矢量。以定子磁链矢量跟踪误差的有效值公式(19)作为价值函数,通过比较得到的最小值确定最优II矢量。
(18)
(19)


3 实验结果
为了验证所提方法的有效性,搭建了图4所示基于dSPACE1104控制器的电驱平台。实验用PMSM电机参数如表3所示。实验中对传统MPTC和所提TVS-MPFC控制方式采用相同PI参数,采样频率均设置为10 kHz。
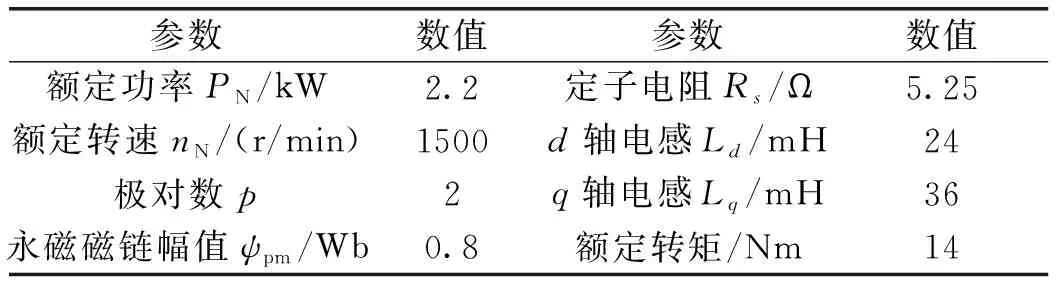
表3 PMSM电机参数
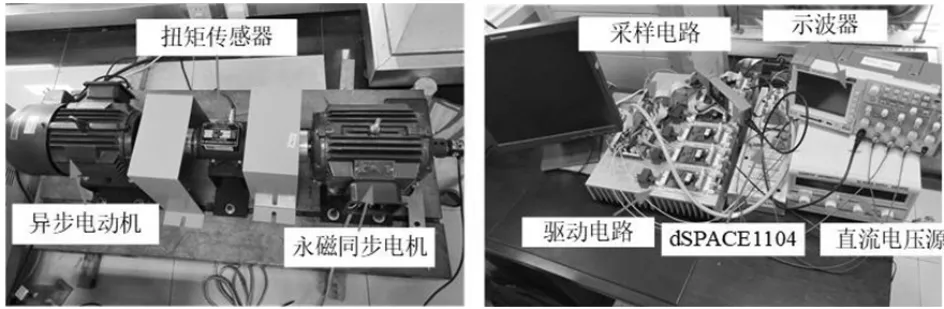
图4 实验平台
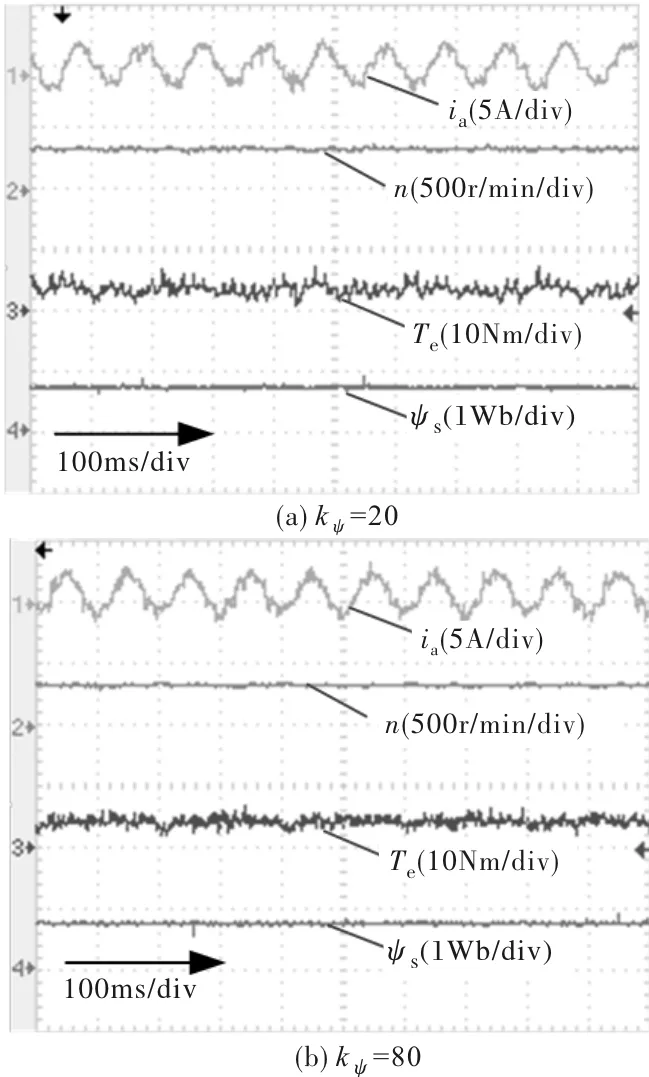
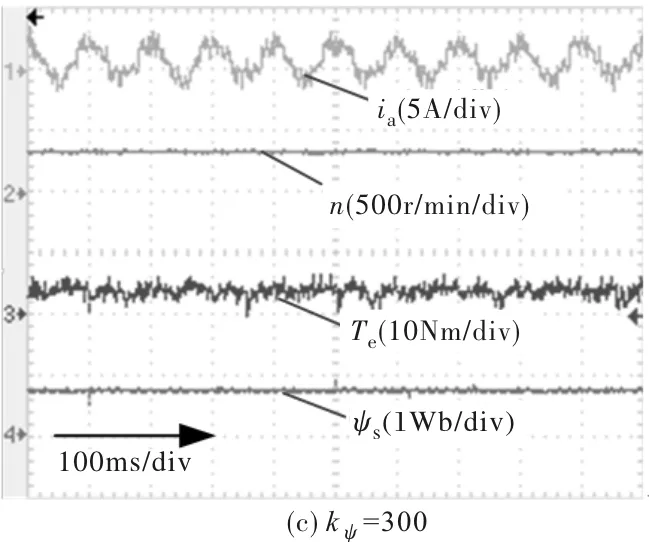
图5 不同权重系数下传统MPTC方法的稳态实验结果
图5给出了电机在负载4 Nm、转速300 r/min工况下,不同权重系数下传统MPTC方法的稳态实验结果。如图5,不同权重系数(kψ=20,80,300)时,通过比较A相电流、转矩、定子磁链和转速波形可以发现:当权重系数为80,此时电机的转矩和电流波形最好。因此,接下来的实验比较中,传统MPTC均基于权重系数80进行实验。
图6给出了电机在转速300 r/min、空载工况下,传统MPTC和TVS-MPFC方法下的稳态实验结果对比。图7和图8给出了电机在负载4 Nm、转速分别为300 r/min和100 r/min工况下,这两种方法下的稳态实验结果对比,结果如表4所示,表中对比了A相定子电流THD、转矩脉动Trip、定子磁链脉动ψrip和计算时间。由表4可见,采用本文提出的TVS-MPFC方法在各方面的表现均优于传统MPTC,不仅有效抑制了转矩和定子磁链脉动,而且显著降低了传统MPTC电流谐波;此外,相比于传统MPTC,TVS-MPFC方法缩短了计算时间。
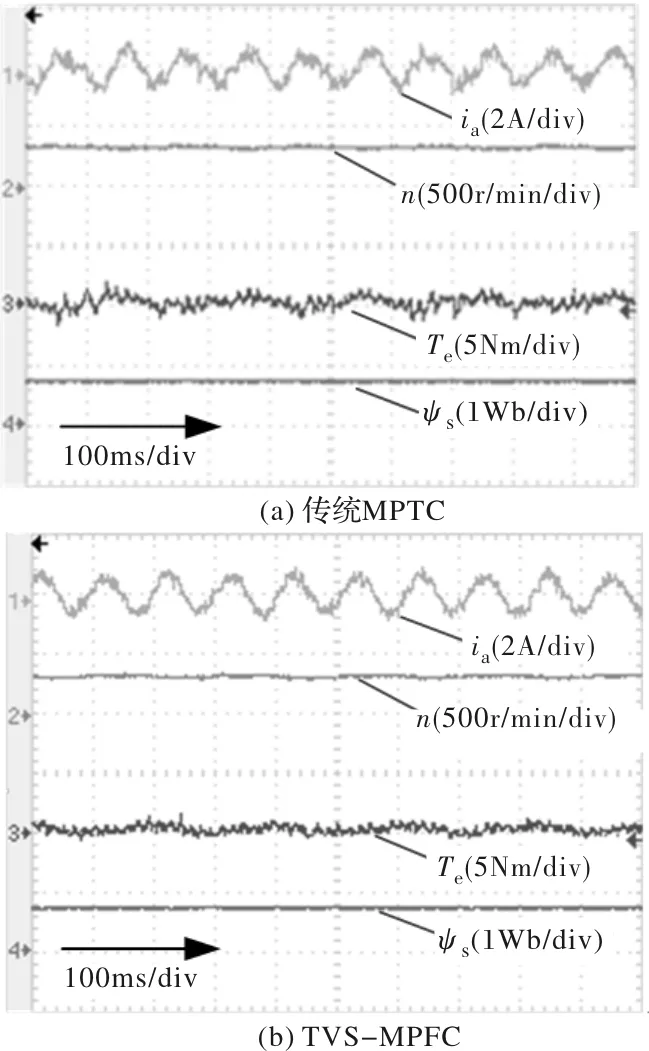
图6 稳态实验结果对比(空载、转速300 r/min)
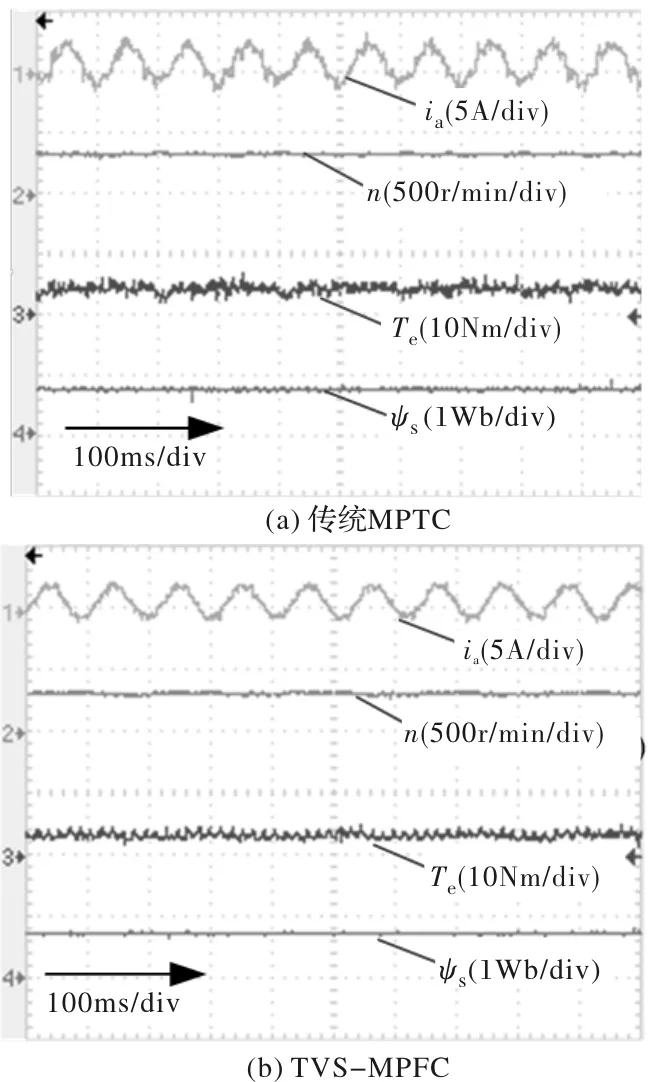
图7 稳态实验结果对比(负载4 Nm、转速300 r/min)
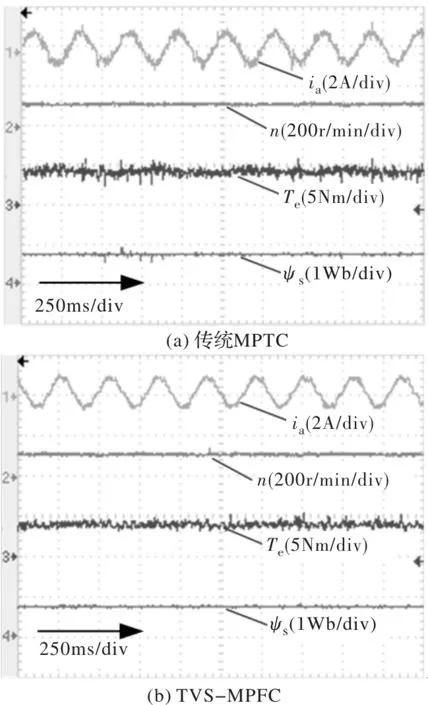
图8 稳态实验结果对比(负载4 Nm、转速100 r/min)
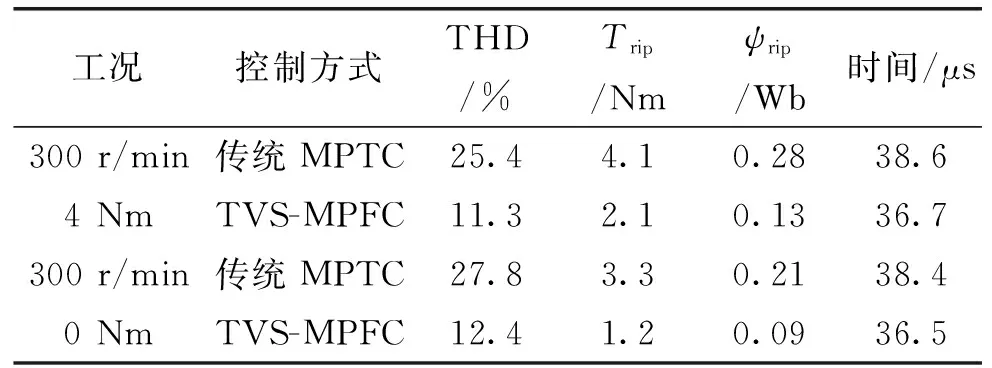
表4 两种控制方式的结果对比
对传统MPTC和TVS-MPFC方法的动态性能进行了对比研究,以进一步验证其控制性能。图9给出了转速在300 r/min时,电机从空载突变到4 Nm的动态实验结果对比。图10给出了负载转矩在4 Nm时,电机从100 r/min突变到300 r/min的动态实验结果对比。由图9可见,突加负载,两种方法下电机转速略有降低但均能快速回到给定,转矩同样快速跟踪突变值。由图10可见,在两种方法下,电机均在100 s内跟踪突变转速,响应速度快。动态实验结果表明,本文所提的TVS-MPFC方法能在改善传统MPTC稳态性能基础上,维持传统MPTC的快速反应。
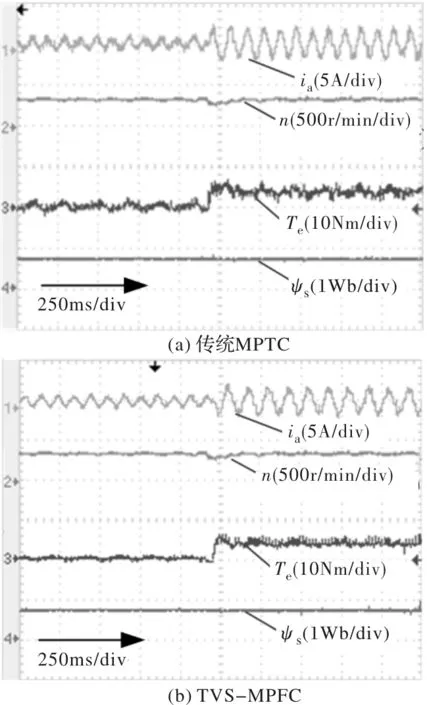
图9 负载突变时动态结果对比(转速300 r/min,空载~4 Nm)
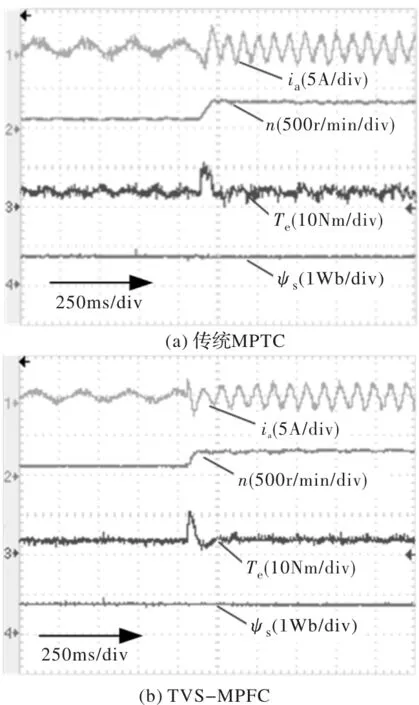
图10 转速突变时动态结果对比(负载4 Nm,100~300 r/min)
4 结 论
本文提出了一种双矢量模型预测磁链控制方法。该方法基于磁链矢量跟踪误差最小化原则,在整个控制周期内对矢量选择和占空比计算同时进行了优化。通过比较两种控制方式的动稳态实验结果,验证了所提策略的有效性。实验结果表明,相较于传统MPTC,所提的TVS-MPFC方法在减小了永磁同步电机转矩和定子磁链脉动的同时,降低了定子电流的谐波含量,并获得了更好的动态性能。
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
核科学与工程(2021年4期)2022-01-12 06:30:04
煤气与热力(2021年4期)2021-06-09 06:16:54
防爆电机(2021年1期)2021-03-29 03:02:46
中华戏曲(2020年1期)2020-02-12 02:28:18
测控技术(2018年2期)2018-12-09 09:00:52
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电机与控制应用(2015年10期)2015-03-01 03:50:16
电测与仪表(2014年23期)2014-04-04 12:08:30
