永磁同步电机驱动系统离散域电流环设计
2020-04-20 06:38苏锦智张继鹏安群涛孙建国张建秋
微电机 2020年11期
苏锦智,张继鹏,安群涛, 孙建国,张建秋
(1.包头长安永磁电机有限公司,包头 014030;2.哈尔滨工业大学 电气工程系,哈尔滨 150001)
0 引 言
在高速电机系统中基波频率较大,以及大功率电机驱动中开关频率较低,使得载波比降低,数字延时造成了电流控制性能下降。表现为d、q轴间耦合问题加重、离散误差增大和延时导致电流环不稳等。为改善低载波比下d、q轴电流解耦效果,前馈、反馈、内模、复矢量等方法被提出[1-4]。然而,通常的电机数字控制器设计思路是首先建立系统连续时间域数学模型并选取合适连续时间域的控制参数,再采用欧拉、双线性变换(Tustin)等方法进行离散化,这在载波比较高时能够实现较好的控制效果,但随着载波比降低,将会产生较大的数字控制延迟,进而影响电流动态解耦效果和系统性能。文献[5]考虑数字控制延迟和逆变器输出电压钳位效应,建立了精确的离散时间域交流电机数学模型,基于z平面零极点对消原理设计离散化控制器,取得了较好的电流解耦效果。文献[6]通过引入电压磁通方程,拓展了直接离散化电流调节器对同步磁阻电机的适应性。文献[7]建立了永磁同步电机零阶保持等效模型,设计二自由度PI电流控制器,提高了低载波比控制器对参数变化鲁棒性。
本文在永磁同步电机的离散数学模型基础上,通过对连续域和离散域下电流环零极点的对比分析,揭示传统采用连续域设计电流环再进行离散化方法的存在的问题,在离散域下直接进行电流环的分析和设计,能够提升电流控制性能。低载波比下的对比实验表明,离散域设计的电流环较常规方法设计的电流环具有更好的稳定性和控制性能。
1 永磁同步电机的离散数学模型
1.1 离散化时变量间的关系
在数字电机控制器中,采样与更新时序如图1所示。在三角载波零点处对电流采样,然后计算控制算法,并在下一个三角载波过零点更新比较值。
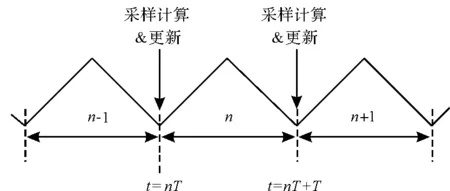
图1 控制器采样与更新时序
当载波比较低时,一个开关周期之内实际角度的变化不可忽略。考虑电气时间常数远小于机械时间常数,认为一个开关周期内的转速不变,角度线性变化,满足:
θe(t)=θe[n]+ωe[n](t-nT)
(1)
式中,θe为电机转子电角度,ωe为电角速度,T为开关周期;t为第n个开关周期内时间,nT≤t≤(n+1)T。
由于更新比较值时,当前开关周期的输出电压为上一开关周期计算得到的电压,存在一拍的延时,即:
(2)
这一拍延时,只是静止坐标系下的电枢电压,而非dq坐标系下的电压。若认为一个开关周期内角度发生变化,dq坐标系下的电压满足:
(3)
联立式(1)和式(3),可得dq轴电压在第n个开关周期内的连续值和该周期离散值的表达式:
udq(t)=e-jθ(t)ejθ[n]udq[n]=e-jωe(t-nT)udq[n]
(4)
1.2 离散数学模型
表贴式永磁同步电机(SPMSM)在dq坐标系下的电压方程为:
(5)
式中,ud、uq,id、iq分别为d和q轴电压和电流;R为绕组电阻;L为绕组电感;ψf为永磁磁链。
式(5)写成状态方程的形式,如下:
(6)
式中,状态向量x=idq=[idiq]T;输入向量u=[udqedq]T;状态系数矩阵的复数形式为Ac=-R/L-jωe;输入系数矩阵Bc=[1/L-1/L]I;输出系数矩阵Cc=I,I为单位矩阵;y为输出向量。
将连续模型离散化的方法较多,根据时域离散相似法的原理表达式:

(7)
(8)
将电机的连续数学模型(6)离散如下:
(9)
式中,Ad为离散状态方程系数矩阵,Ad=[e-(R+jωeL)T/L];Bd为离散状态方程控制矩阵,如式(10)所示;Cd为离散状态方程输出矩阵,Cd=I。
(10)
离散域下电机电流环的传递函数表达式为:
(11)
联立式(3),则传递函数表达式如下:
(12)
2 离散域下电流控制器设计
2.1 连续域PI控制器
通常电流环控制器是在连续时间域下进行设计,并选取适当的离散化方法在数字控制系统中实现,常用的离散方法有前向差分、后向差分、Tustin等。前馈解耦后连续时间域下电流环的传递函数为:
(13)
以q轴为例,电流环的传递函数框图如图2所示。TPWM为逆变器延迟环节的时间常数,TFi为电流采样的滤波时间常数,逆变器延迟环节的时间常数远小于电机的电气时间常数。工程上常将电流内环整定为I型系统,选取PI控制作为电流调节器进行零极点对消,其整定结果表达式如下:
(14)
式中,α为电流环的带宽。
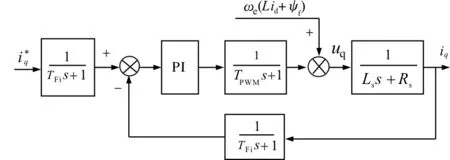
图2 q轴电流环传递函数控制框图
式(14)中的PI控制器是在连续域下设计得到的,经过Tustin离散后,其表达式为:
(15)
对比上式和式(12)可知,在连续域下可以实现电流环的零极点对消,而在离散域下并不满足。
在离散时间域下,画出式(12)的极点分布与式(15)的零点分布随转速上升的变化规律,如图3(a)所示,其中电机参数见实验部分。转速从0以1000 r/min的间隔上升至30000 r/min,开关频率为10 kHz,对应的载波比由无穷降至20。图3(b)为经过PI控制并采用Tustin离散后的电流环闭环传函极点分布随载波比下降的规律图。图3(a)中可见,随着载波比的降低,电流环开环传函的一个极点向阻尼比降低的单位圆外移动,而经离散的传统PI控制器的零点始终在实轴上不移动,无法实现零极点的对消。图3(b)中可见,电流环闭环传函的三个极点随着载波比降低移动范围较大,尽管极点分布的范围均在单位圆内,但闭环极点较大的移动范围势必对电流环的控制性能产生影响,不同转速下的电流环控制性能不同,难以适应较宽的调速范围。
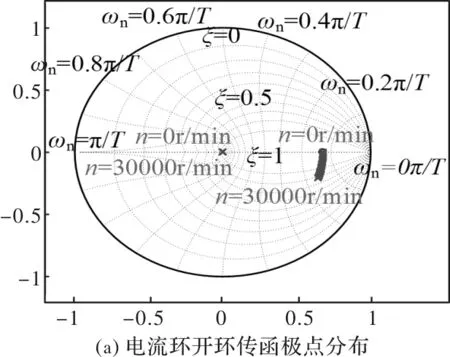
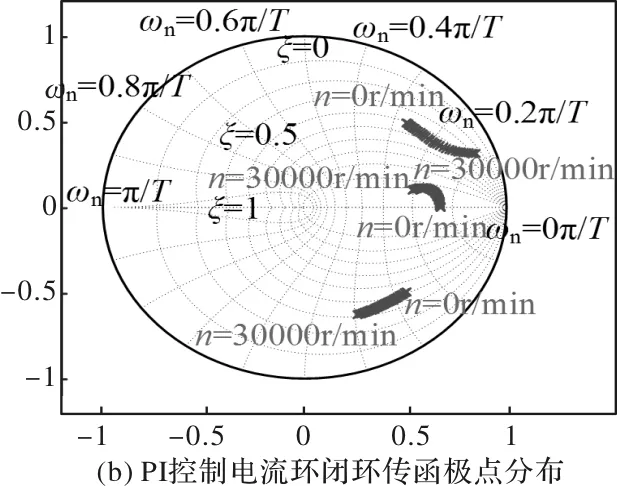
图3 离散域下PI控制电流环极点分布图
2.2 离散域下电流环设计
观察式(12),在离散域下直接设计电流环控制器,以实现零极点对消。为保证电流环控制器的阶数与传统PI控制器一致,设计的电流环控制器分母分子阶数应与式(15)一致,其公式如下:
(16)
式中,kz为离散电流环控制器的参数。
设计的电流环控制器中,分子的零点保证了电流环的零极点对消,而式中的e指数耦合项则用于实现对一个开关周期内角度变化的补偿。但在该电流环控制器中,不具备连续域下明显的积分或比例的实际意义。
画出电流环闭环传函的零极点分布随载波比降低的变化规律,如图4所示,其中kz为0.7381。可见,闭环传函的两个极点随载波比降低并不移动,而另一个极点与零点随载波比降低同步地向阻尼比降低的方向移动,可以认为控制器式(16)实现了零极点的对消,电流环的控制性能基本不随载波比降低而变化。
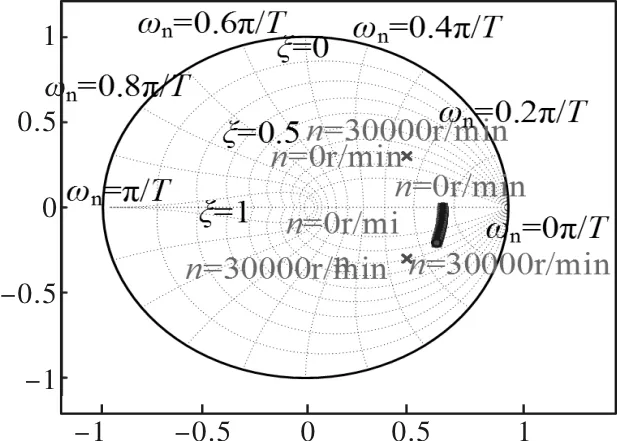
图4 离散域设计的电流闭环零极点分布图
经过分析可知,零极点对消后剩余的两个闭环极点,是方程(17)的解。
(17)
考虑系统稳定性,这两个闭环极点应在单位圆内,根据式(17)求得,kz∈[0,2.1726],该参数的值决定了两个闭环极点的位置,进而确定了电流环的阻尼比。常取阻尼比ξ为0.707,此时参数kz为0.7381。
参数kz的取值范围较小,下面进行鲁棒性分析。考虑电机的电气时间常数存在±5%的摄动,电流环闭环传函的零极点分布如图5(a)所示,在三个闭环极点附近的放大图分别如图5(b)、图5(c)和图5(d)所示。可见,当电机的参数存在误差时,设计的离散域电流环控制器难以实现零极点的对消,且闭环极点的位置随着载波比降低而变化,电流环控制性能下降。但极点随载波比降低的移动的偏差较小,均在单位圆内,可以认为设计的电流环控制器鲁棒性较好。
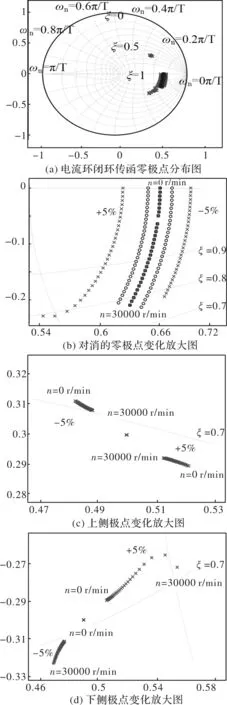
图5 电机参数摄动时电流环闭环零极点分布变化图
3 实验验证
为评估离散电流控制环的性能,在3 kW永磁同步电机驱动系统上进行了测试,电机参数:额定转速30000 r/min,电阻0.7 Ω,电感0.18 mH,永磁磁链0.036 Wb,极对数为1。供电电压300 VDC。为验证低载波条件下电流环的控制效果,开关频率设定为600 Hz,负载为2 Nm。分别对连续PI控制器Tustin离散法和离散域设计的电流控制器进行带载加速,从200 r/min以50 r/min·s-1的加速度加速至1200 r/min(即载波比为7.5),波形如图6所示。
可见,当载波比降低时,电流控制效果明显变差,这是由于一个正弦周期内采样点较少造成的必然结果。图6(a)中,使用经典PI控制器下,转速在升速到1000 r/min附近,q轴电流误差显著增大,电流内环失去稳定,进而使得转速外环失去稳定。而图6(b)中,载波比降低导致q轴电流误差增大,但电机仍能稳定运行在1200 r/min。
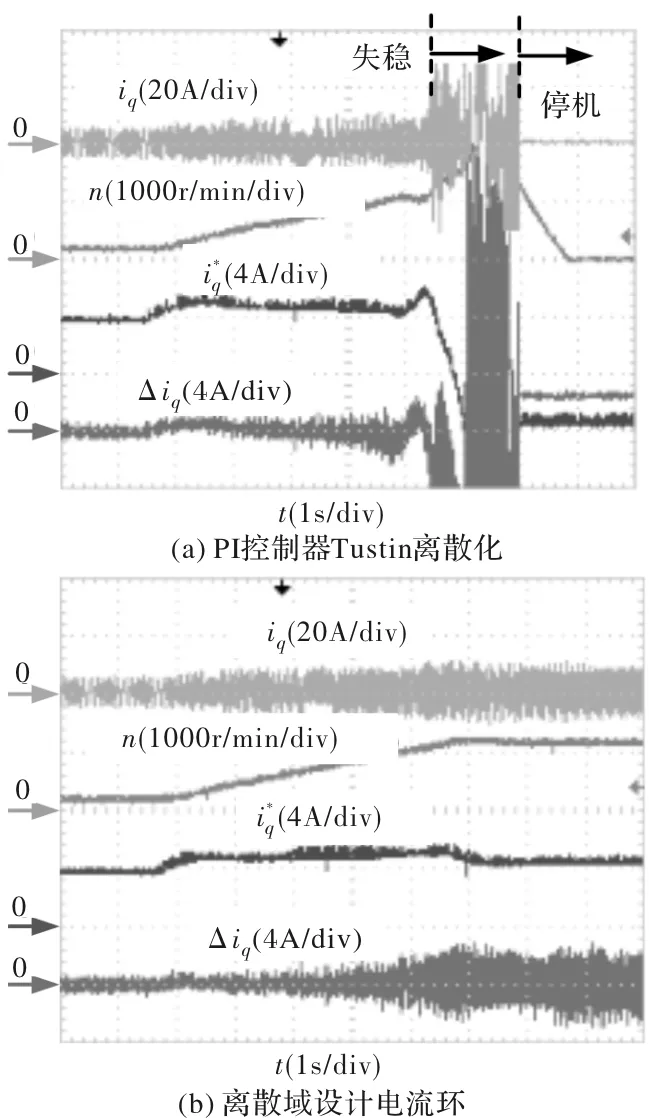
图6 两种电流环的性能对比
为验证离散域设计电流环在低载波下的控制性能,对电流阶跃响应和负载扰动性能分别进行测试。首先将电机堵转,使用120 Hz的开环位置角,给定q轴电流从0 A阶跃至3 A进行验证,此时载波比为5,波形如图7(a)所示。电流环阶跃响应时间约为40 ms,相比于15 ms的电气时间常数响应较迅速。在1800 r/min转速下(载波比为5),通过加减2 Nm负载验证转速电流双闭环的控制效果,结果如图7(b)所示。尽管q轴电流误差较大,但电机仍能稳定运行,且对负载突变抗扰性能良好。而经典的电流环控制器不论在电机堵转还是1800 r/min时,均在载波比为5时无法稳定运行。
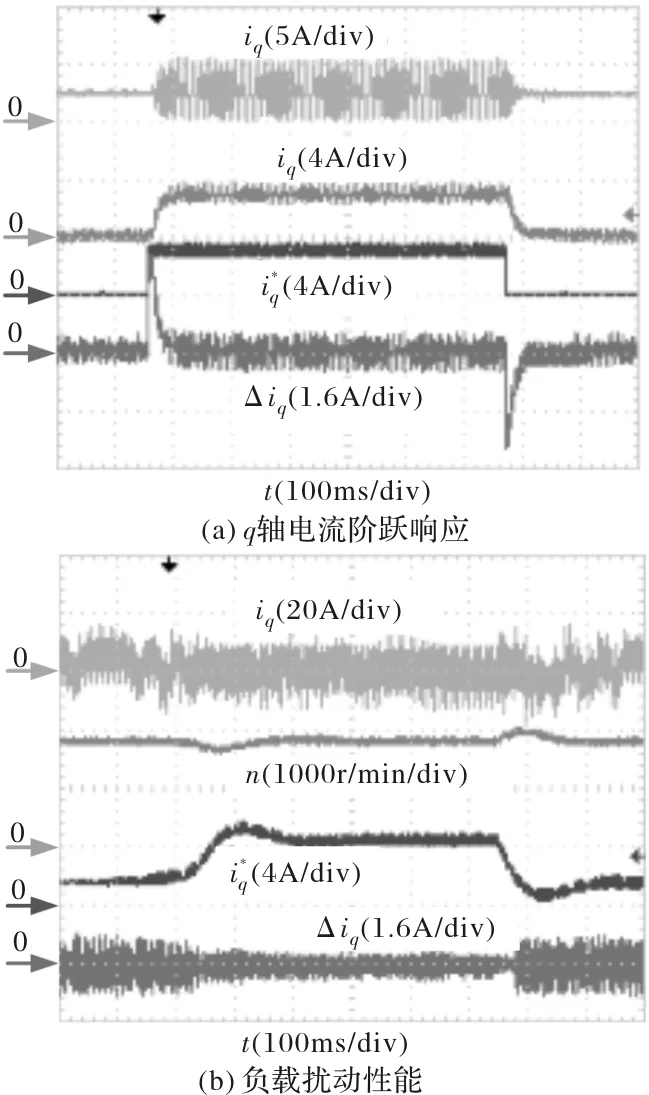
图7 低载波比下的离散电流环性能
4 结 论
针对低载波比运行条件时永磁同步电机电流环控制性能下降的问题,在离散时间域下对电流环控制器进行设计。通过将电机的数学模型离散化,直接在离散域下设计电流环,并给出参数确定方法。通过实验验证电流环控制器离散域设计方法的有效性,提高低载波比下永磁同步电机的控制性能。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
电机与控制学报(2018年8期)2018-05-14
西部资源(2017年5期)2018-02-23
海峡科技与产业(2017年12期)2018-01-18