
基于模糊免疫PID控制器在球杆网络控制系统中的仿真研究
2020-04-14 04:54黄丽华
电脑知识与技术 2020年4期
黄丽华
摘要:为了研究网络控制系统中时延和丢包对系统性能的影响及寻求改善性能的方法,改进了一种模糊免疫PID控制器,借鉴生物免疫反馈控制对PID参数进行在线自动调整;并利用MATLAB仿真平台TrueTime2.0工具箱搭建网络控制系统模型进行仿真研究。仿真结果表明:在不同程度时延、丢包的网络环境下,采用改进的模糊免疫PID控制器的系统输出超调量较小,调节时间缩短,鲁棒性和自适应性能更优。并将该方法在非线性不稳定球杆系统中时,能有效地使系统稳定。
关键词:网络控制系统;模糊免疫PID控制器;TrueTime2.0工具箱;鲁棒性;自适应性
中图分类号:TP393
文献标识码:A
文章编号:1009-3044(2020)04-0156-03.
随着控制、网络及通信技术的发展与相互融合,信息时代对控制网络与信息网络应无缝集成的要求,综合自动化水平得:到了新的发展。网络控制系统(Networked Control Systems,NCS),是通过网络构建起一种分布式的闭环反馈控制系统,它能将不同位置的传感器、执行机构和控制器连接起来[1]。与传统的控制系统相比,NCS引入了网络环节,使得系统中的传感器与控制器,控制器与执行器之间的数据传递和交换,由原来的直接传递转为由网络来进行交换;而且,网络的引入也大大地提高了传统控制系统的模块化程度,抗干扰能力和系统灵敏度也有所增强,减少了控制系统布线、安装和维修成本。
近年来,人们通过对生物系统的不断研究,提出了多种优化算法。免疫算法是一种基于生物体系人或其他高等动物免疫系统的机理而设计建立的新型智能算法,为解决NCS中的各种问题提供了新的研究方法。球杆系统作为控制领域中一个非常经典的控制对象,许多控制算法、设计方法均以球杆系统为实验对象和实验装置,来验证提出理论的合理性和科学性。目前,将模糊PID控制、神经网络控制、鲁棒控制、最优控制等先进的控制方法应用到球杆系统中,进一步验证这些控制算法的有效性。
由于在网络环境下非线性系统很难确定精确的数学模型,传统PID控制器的控制效果不能满足高性能要求,本文结合生物免疫系统机理及人工智能控制方法,设计并改进了一种模糊免疫PID控制器,使其既具有传统PID控制的可靠性又兼具模糊控制的鲁棒性,同时利用了免疫系统的反馈机制与记忆功能,解决了传统PID控制器的快速性与精确性不兼具的问题。仿真实验结果表明,当网络控制系统存在时延、丢包时,采用模糊免疫PID控制器的系统输出超调量较小,调节时间缩短,鲁棒性和自适应能力也优于传统的PID控制器和模糊PID控制器。而将该算法应用到球杆系统中时,也能在最短时间内,系,统达到稳定状态。
1 模糊PID控制器
1.1 模糊控制原理
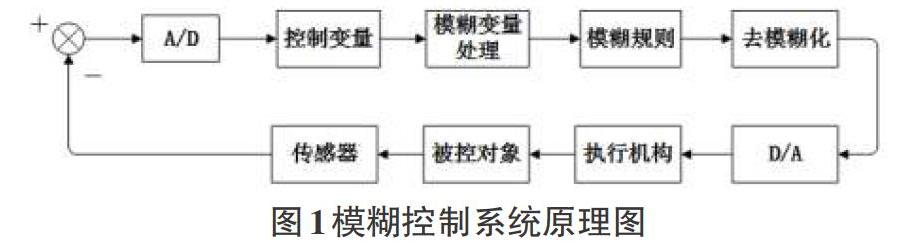
与传统控制方法相比,模糊控制具有以下优点[4]:不要求有精确的数学模型作为被控对象,解决了系统的不确定性问题;较强的鲁棒性和自适应能力,可以从行为上模拟人的模糊推理和决策过程等。很多专家学者将模糊控制與神经网络控制、专家控制和GA等智能控制相结合这很大程度上给模糊控制带来了极大的活力。控制原理如图1所示。
1.2 模糊PID控制器设计
基于模糊PID控制器的网络控制系统如图2,其核心是模糊PID控制。通过引入模糊推理系统,对PID初值通过增加修正参数进行校正,进而改善系统动态性能吧。
1)模糊PID控制器的输入信号选择给定值与反馈值之间的误差e和误差变化率ec;
2)模糊控制器接收输入信号e和ec,利用先验知识库进行模糊推理,输出模糊控制器的三个控制参数的变量值;
3)控制参数通过PID控制器整定,输出相应的控制信号,通过通信网络传递给执行机构,然后根据控制信号执行相应动作,实现了被控对象的远程控制。
PID控制器规律如式(1)所示:
式(1)中K。为比例常数,T;为积分时间常数,Ta为微分时间常数。
式(2)中K。为比例常数,K,为积分常数,Kp为微分常数。在实际系统里需要调整的是PID控制器中的Kp、KpKp三个参数,本文利用先验知识和专家经验进行模糊推理对PID三个参数进行在线自整定,直到系统有稳定输出,从而保证了整个基于PID控制器的网络控制系统的运行处于平稳的状态[4]。
2 改进的模糊免疫PID控制器设计
2.1 免疫控制原理
生物的一种特征生理反应即免疫。当外来抗原侵入机体内,免疫系统(Immune system)会产生相应的抗体来抵御。抗体结合抗原后,可通过吞唾或产生酶来毁坏抗原。免疫细胞识别、活化、分化和效应抗原的过程即为免疫过程9。
当抗原侵入机体经周围细胞消化后,将信息传递给T细胞,即传递给细胞Th和细胞Ts,刺激B细胞产生抗体以消除抗原,经过一段时间免疫反馈系统便趋于平衡。由于抗原的侵入,B细胞一方面受到Th细胞的活化作用,另一方面也接受Ts细胞的抑制作用,这样第k代B细胞的浓度如公式(3):
式(3)中ε(k)表示第k代抗原浓度;K,表示Th细胞的促进因子;K,表示Ts细胞的抑制因子;f[AB(k:-d)]表示一个非线性函数,与B细胞的浓度变化△B(h)有关,表示B细胞在第(h:-d)代时,分泌的抗体与抗原相互作用后的免疫效果。按公式(4)进行计算:
式(4)中d表示免疫响应的延迟时间。
由式(3)~(4),可得到B细胞的浓度与抗原浓度的关系式(5):
将免疫机理运用到控制系统中:
(1)将第k代的抗体和抗原作为控制系统的第k个采样时间。
(2)第k代的ε(k)近似于控制系统第k个采样时间的偏差e(k)。.
(3)第k代的B(k})看作控制器第k个采样周期的输出信号u(k)。由此可以得到免疫控制器如式(6):
式(4)中K表示控制反应的速度,可根据控制系统的特性进行选择。在一般的免疫PID控制系统中,为了使控制效果得到改善,就要在线调整PID控制器的三个参数KpK.Kp。采用免疫原理实现PID参数Kp的自调整,而参数K,K,则用模糊推理进行在线调整。
设计的免疫PID控制器如下:
K——控制反应速度 ;
η——控制稳定效果;
f(·)——选定的非线性函数。
2.2 改进的模糊免疫PID控制器设计
免疫PID控制器实际上是一种非线性P控制器,即比例系数Kp随控制器输出的变化而按照非线性函数f在线进行调整。本文中设计的模糊免疫PID控制器在此基础上进行改进,其中PID控制器的比例系数、积分系数和微分系数都是通过模糊免疫调节器在线自动调整,即公式(8)~(10):
改进的模糊免疫PID控制器的网络控制系统结构图如图3。
非线性f函数在免疫响应过程中起着非常重要的作用,与控制器输出的变化有很大关系。本文中利用模糊推理逻辑逼近非线性函数f(),模糊输入变量为u和△u,模糊输出变量为f。输入变量u和△u由2个模糊子集“正(P)”和“负(N)”进行模糊化,而输出变量f。、f;和f。被3个模糊子集“正(P)”“零(Z)”和“负(N)"模糊化。隶属度函数采用Zadeh的模糊逻辑AND操作和常用的mom反模糊化方法,同时为了保证f()对系统的稳定性,以“细胞接受的刺激越大,则抑制能力越小”的原则。设计变量u、Ou和f之间的模糊规则,例如f(.)的模糊规则如表1所示:
3 仿真验证
3.1 仿真模型构建
为了研究在不同网络环境下模糊免疫PID控制器的控制性能,利用MATLAB里TrueTime 2.0工具箱,搭建出基于模糊免疫PID控制器的网络控制系统的仿真模型如图4所示。
本文中该系统利用TrueTime工具箱里的TrueTime Kernel模块来实现控制器节点、执行器节点、传感器节点和干扰节点,利用TrueTime Network模块构建起各模块之间的网络通道。其中控制器模块的部分程序如下:
function [exectime,data]=ctrlcode(seg,data)
switch seg,
case 1,
data.r=ttAnalogIn(1);.
data.y=ttGetMsg;.
data.u=data.u_1+data.Kp*(data.e data.e_1)+data.Ki*data.e+data.Kd*(data.e-2*data.e_1 +data.e_2);
该系统选取的被控对象为三阶系统:2.744/s3 + 4.0526s2 + 16.2104s + 0.8416,常规PID控制器的初值为:Kp=7;Kj=0.02;K;=1.8,输入信号采用幅值为1的阶跃信号。模糊免疫PID控制器的免疫因子根据专家经验取值如下:η=0.04;n2=0.04;η3=0.01;
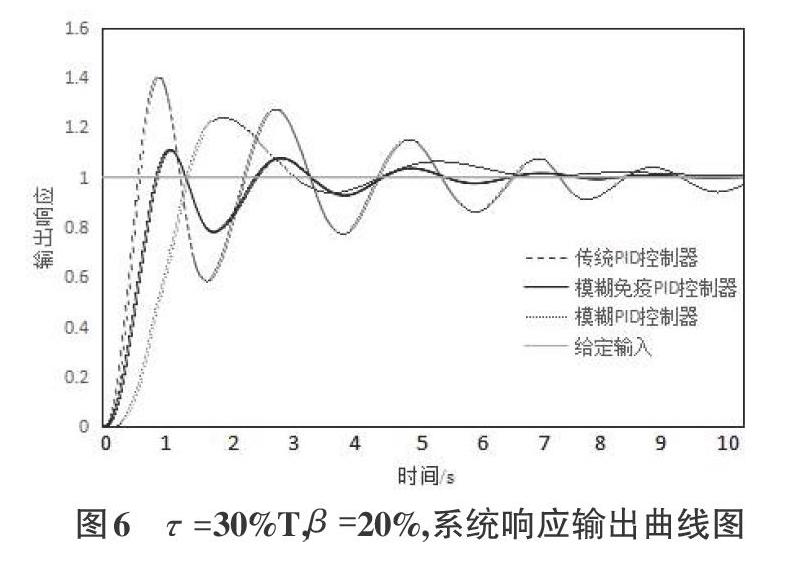
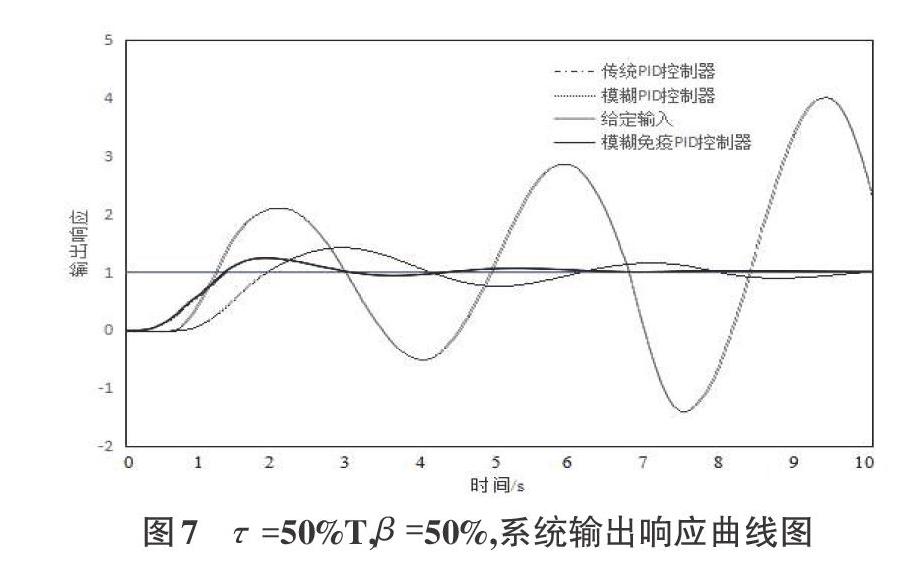
本文主要针对不同时延和数据通信丢包率下传统PID、模糊PID和模糊免疫PID网络控制系统的控制性能进行对比分析。仿真过程中,设通信模式设为(CSMA/CD)Ethernet,时延为τ、丢包率为β,网络传输速率为80kbit/s,将采样周期T设置为0.01s。在参考设置下,将时延τ分别设置为0%T、30%T、50%T,丟包率β分别设置为0%、20%、50%进行仿真。在傳统PID控制器、模糊PID控制器和模糊免疫PID控制器下系统响应输出分别如图5、6、7所示。
3.2 仿真结果对比与分析
对实验结果进行分析,当时延τ分别设置为0%T、30%T、50%T,丢包率β分别设置为0%、20%、50%时,三种控制器的超调量,调节时间以及稳态误差如表2所示。
由以上对比分析结果可知,在网络中无时延和无丢包时,模糊免疫PID控制器的超调量以及调节时间都优于传统的PID控制器和模糊PID控制器;而当时延、丢包较大时,模糊免疫PID控制器较另外两种控制器也能趋于稳定,具有较强的鲁棒性和良好的动态性。
3.3 球杆系统验证及分析
球杆系统是典型的单输入单输出的非线性不稳定系统。球杆系统的机械部分包括底座、小球、横杆、减速皮带轮、支撑部分、马达等。球杆系统的基本控制思路是为了实现通过控制直流伺服电机的转动位置来控制小球位置的目的:通电后直流伺服电机转动,带动皮带轮转动,经过传动机构,控制横杆的倾斜角度,小球运动位置随之改变。球杆系统实验现象直观、明显,不仅可以表现出很多控制系统的基本概念,如:跟随特性,鲁棒性等,而且很吸引学生注意力,是典型的控制理论实验平台。应用牛顿一欧拉法对球杆系统进行数学建模:
当以θ为系统输入量时,位置r和θ的传递函数为:
将上述改进的模糊免疫PID控制器应用到球杆系统中,得出如图8的结果图:
从结果分析可知,本文设计的改进的模糊免疫PID控制器在球杆系统中,能有效地使系统达到稳定。
4 结论
本文就在网络环境下非线性系统没有精确的数学模型,传;统PID控制器的控制效果不能满足高性能要求,设计了模糊PID控制器,结合免疫反馈原理及人工智能控制原理,设计了模糊免疫PID控制器。仿真实验表明,当网络控制系统存在时延、丢包时,采用模糊免疫PID控制器的系统输出超调量较小,调节时间缩短,鲁棒性和自适应能力也优于一般的PID控制器和模糊PID控制器。而在非线性不稳定球杆系统中进行验证时,也能有效地使系统稳定,验证了该方法的正确性。
参考文献:
[1]Pin G,Parisini T.Networked predictive control of uncertain con-
strained nonlinear systems:recursive feasibility and input-to-state stabilty analysis[J].IEEE Transactions on Automatic Con-trol,2011,56(1):72-87.
[2]刘向杰,周孝信,柴天佑.模糊控制研究的现状与新发展[J].信息与控制,1999,28(4):283-292.
[3]冯冬青,任雪梅.模糊PID在网络控制系统中的仿真研究[J].自动化仪表,2013,34(1):61-63,68.
[4]张晓倩,曹建建.基于模糊PID控制器的网络控制系统仿真研究[J].电子产品世界,2016,23(6):34-37.
[5]王素娥,郝鹏飞,郑恩让.免疫PI控制器的仿真研究[J].微计算机信息,2004,20(5):17-18.
[通联编辑:唐一东]
猜你喜欢
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
太原科技大学学报(2019年3期)2019-08-05
中国防伪报道(2017年4期)2017-06-15
西南交通大学学报(2016年3期)2016-06-15
项目管理技术(2016年12期)2016-06-15
电子制作(2016年21期)2016-05-17
西南交通大学学报(2016年6期)2016-05-04
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
