
基于WiFi探针的路段空间平均速度检测系统设计
2020-04-09 04:33冯靖贺李曙光
物联网技术 2020年3期
冯靖贺 李曙光

摘 要:针对车牌对照法、航空摄影法和GPS浮动车法等传统的路段空间平均速度检测方法存在耗时耗力和实时性差等弊端,设计了基于WiFi探针设备的路段空间平均速度检测系统。该系统使用WiFi探针采集道路车辆WiFi信息,实时上传服务器,挖掘WiFi信息时空特性,获取路段空间平均速度,并利用LSTM神经网络预测路段空间平均速度,最后通过实例验证本系统设计的可行性。
关键词:WiFi探针;空间平均速度;LSTM;交通信息检测系统;K-Means++聚类算法;网络模型
中图分类号:TP39 文献标识码:A 文章编号:2095-1302(2020)03-00-03
0 引 言
实时准确地掌握道路交通运行状态对提升道路交通服务水平和运输能力至关重要[1]。路段空间平均速度是评价道路交通运行状态的重要指标,同时也是反映道路交通状况和服务水平的基本参数之一[2]。固定式点检测器仍是交通信息采集的主要设备,采集的车速信息以定点车速为主,在此基础上估算路段空间平均速度不够准确。基于车牌识别对照和电子车牌技术的区间测速手段准确率较高,但设备造价高昂,普及率较低。航空摄影法受拍摄手段影响,无法长时间持续获取数据[3]。GPS浮动车法在实际中容易出现特定目标路段样本量较少的情况[4-5]。
WiFi、蓝牙等无线技术的普及为交通信息采集提供了更多思路。Ahmed构建了基于无线技术的交通检测平台,初步验证了无线检测技术应用于交通领域的可行性[6]。LSTM(长短期记忆)神经网络能够克服RNN可能出现的梯度爆炸或消失问题[7],面对交通流的随機性和非线性,能够提取更多时空信息,更有效地解决短时交通流预测问题[8]。
本文利用WiFi检测技术设备造价低、安装维护方便、普及性高等优势,基于WiFi探针设备设计了一种路段空间平均速度检测系统。
(1)结合设备特点合理布设设备,实时高效地采集WiFi数据样本。
(2)以WiFi数据样本为基础,实时计算路段空间平均车速。
(3)构建LSTM网络模型,实现对路段空间平均车速的准确预测。
1 系统总体框架设计
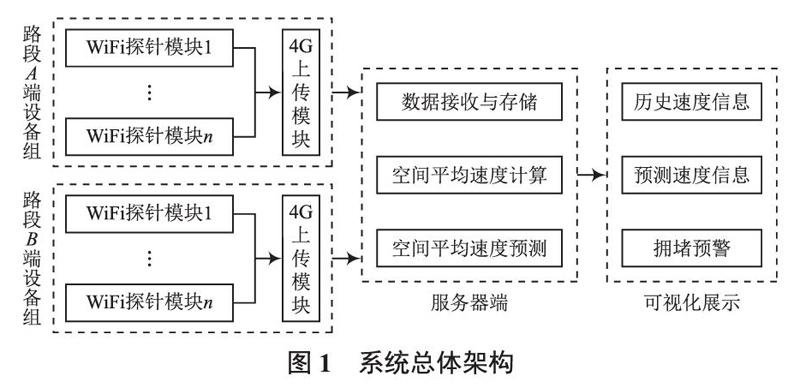
系统总体框架主要包含数据采集设备端、服务器和可视化展示三个部分,如图1所示。
WiFi探针被布置在待测路段首尾两端截面的位置(记为A端和B端),实时探测周边环境中的WiFi信息。当载有WiFi信号的车辆等交通目标通过该待测路段时,WiFi探针会检测到其设备MAC地址、通过路段AB端时的时间戳tA和tB、信号强度信息,通过4G模块以UDP协议形式上传至服务器,并保证各设备的时间同步性。当路段长度为0.32~0.8 km时,路段空间平均速度能够较好地反映交通细节[9],考虑到WiFi探针设备检测覆盖半径约50 m,因此本系统选择待测路段的长度范围为600~800 m。
2 路段空间平均速度检测系统设计
路段空间平均速度检测系统包含路段空间平均速度的获取和预测。当服务器端接收到探针实时上传的WiFi信息时,便计算路段当前的空间平均速度,并进一步预测下一时间周期的速度信息。
2.1 路段空间平均速度的获取
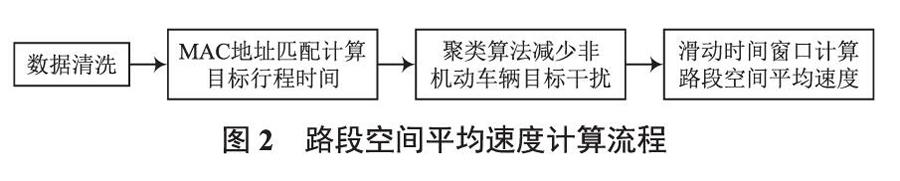
设备MAC地址由IEEE进行管理和分配,具备全球唯一性。在服务器中对检测路段A,B两端的WiFi探针采集的数据样本进行基于MAC地址的匹配,获取样本经过该路段两端的时间戳tA和tB,时间戳之差为样本的行程时间,可根据待测路段的长度计算样本的区间行程速度。图2展示了路段空间平均速度的获取流程。
检测路段的环境可能较为复杂,行人、非机动车等干扰的存在会使最终计算出的路段空间平均速度偏低(路段非拥堵状态下)。本文采用K-Means++聚类算法剔除行人、非机动车等样本数据,减少最终路段区间平均速度的计算误差。具体步骤如下:
Step1:选取WiFi探针采集样本的路段区间行程速度作为K-Means++聚类算法的聚类特征。
Step2:采用elbow法确定K-Means++聚类算法的初始聚类簇数,即K值。
Step3:根据选定的K值,利用K-Means++聚类算法对采集样本进行聚类,选取聚类中心值最大的一个聚类簇作为车辆类。
使用elbow法的原因在于实际路段混合交通特性没有直观的体现,根据数据本身确定聚类数是更好的方式。最终,以聚类之后遴选出的车辆类样本数据,进一步计算路段空间平均速度。
采用滑动时间窗口计算待测路段的空间平均速度,具体如图3所示,图中时间轴上的滑动时间窗口宽度W为
5 min,窗口滑动步长L为1 min,时间窗口内的行程速度的调和平均值可近似为待测路段在此期间的空间平均速度。随着时间窗口的逐步滑动,发现待测路段的空间平均速度随时间发生变化。
2.2 路段空间平均速度的预测
系统利用Keras框架实现LSTM预测模型的搭建和训练。为了兼顾训练速度和测试精度,选择的模型深度为4层[10],其中包含两个LSTM层,每层神经元个数为128,激活函数分别为“elu”和“tanh”。每个LSTM层后接一个Dropout层,设定随机断开25%的神经元。模型的优化器选择“adam”,激活函数选择“sigmoid”,损失函数选择“mse”。
获取的路段空间平均速度数据经过异常值清洗、相邻数据平均法补齐缺失值和min-max法归一化操作,然后使用训练后的模型进行预测,再经过最终的反归一化即可得到预测结果[11]。
3 系统测试结果与分析
系统测试地点选取在西安市二环南路东段位于文艺路南口天桥和雁塔立交天桥之间的路段。待测路段全长600 m,东西走向,为双向8车道设计(其中双向各有一辅助车道)。实验采用4个WiFi探针设备,探针检测有效范围约为50 m。两个一组分别安装在实验路段两端的人行天桥上,确保检测范围内无遮挡。该实验待测路段的地图如图4所示,图中三角形为对应的WiFi探针的安装位置,虚线框中为待测路段。
测试时间选取为某一工作日的14:20—18:10,在实验路段进行WiFi样本采集,共有14 451条不同MAC地址的WiFi信号记录。对实验路段两端所采集的数据进行基于MAC地址的匹配,计算样本通过该路段的区间速度。
实验路段有较多的行人、非机动车目标干扰。使用elbow法确定最佳聚类K值,如图5所示。当K值为2時,样本的SSE值出现了最大幅度下降,因此将聚类K值定为2。然后对样本进行聚类,计算路段空间平均速度的时间序列,其中滑动时间窗口宽度选择为5 min,窗口滑动步长为1 min,共得到220个时间周期的速度数据。
使用上文中训练的模型进行单步预测,路段两个方向空间平均速度的预测值和实际值均较为贴合,在速度下降幅度较大时预测效果略差,但能够反映实际中路段空间平均速度的变化趋势。预测结果的平均绝对误差(MAE)分别为0.959和1.083,均方根误差(RMSE)分别为1.284和1.385,系统对检测结果和预测结果的展示如图6所示。
4 结 语
本文设计的检测系统能够对路段空间平均速度进行实时获取和预测,表明了WiFi探针能够用于交通检测领域。WiFi探针相比传统的交通信息检测手段和设备有以下优势:
(1)成本低廉,对道路侵入性低,安装及后期维护方便;
(2)检测数据占用空间小,便于后期处理、传输和存储。
因此,基于WiFi探针的路段空间平均速度预测方法是对当前交通信息采集手段的补充,具有较高的实用价值。
参 考 文 献
[1]姜桂艳,冮龙晖,王江锋.城市快速路交通拥挤识别方法[J].交通运输工程学报,2006,6(3):87-91.
[2]陈秀锋,田家斌,曲大义,等.城市道路空间平均速度估计模型
[J].科学技术与工程,2017(13):77-80.
[3]吴松.机动车区间测速系统综述[J].计量与测试技术,2017(7):71-72.
[4] RAN B,ROUPHAIL N M,TARKO A,et al. Toward a class of link travel time functions for dynamic assignment models on signalized networks [J]. Transportation research,part B(Methodological),1997,31(4):1-290.
[5] TYAGI V,DARBHA S,RAJAGOPAL K R.A dynamical systems approach based on averaging to model the macroscopic flow of freeway traffic [J]. Nonlinear analysis hybrid systems,2008,2(2):590-612.
[6] AHMED H,ELDARIEBY M,ABDULHAI B,et al.Bluetooth and WiFi based mesh network platform for traffic monitoring [C]// Transportation Research Board,Meeting. 2008.
[7] MA X,TAO Z,WANG Y,et al. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data [J]. Transportation research part C: emerging technologies,2015,54(5):187-197.
[8] SCHMIDHUBER J.Gradient flow in recurrent nets: the difficulty of learning long-term dependencies [M]. Wiley-IEEE Press:Gradient flow in recurrent nets: the difficulty of learning longterm dependencies,2001.
[9]何兆成,卢瑞琪,聂佩林.基于浮动车定位数据的高速公路区间平均速度估计[J].公路交通科技,2011,28(6):128-135.
[10]王祥雪,许伦辉.基于深度学习的短时交通流预测研究[J].交通运输系统工程与信息,2018(1):81-88.
[11] TIAN Y,PAN L.Predicting short-term traffic flow by long short-term memory recurrent neural network[C]// 2015 IEEE International Conference on Smart City/SocialCom/SustainCom (SmartCity).IEEE,2016.
猜你喜欢
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
现代检验医学杂志(2016年3期)2016-11-15
三峡大学学报(自然科学版)(2016年6期)2016-04-16
物理实验(2015年9期)2015-02-28
发明与创新(2015年26期)2015-02-27
储能科学与技术(2014年6期)2014-02-27
