斑马线“人-车”博弈仿真*
2020-04-03 02:30段在鹏黄月铃王秀萍黄萍沈斐敏
工业安全与环保 2020年2期
段在鹏 黄月铃 王秀萍 黄萍 沈斐敏
(福州大学环境与资源学院 福州 350116)
0 引言
2017年6月公安部交管局发布数据,近3年来,全国共在斑马线上发生机动车与行人的交通事故1.4万起,造成3 898人死亡,其中机动车未按规定让行导致的事故占总数的90%[1]。同年10月1日起,驾考新规规定驾驶员应主动避让优先车辆和行人,全国各地也广泛开展机动车不礼让行人等交通违法专项整治[2]。经过警民共同努力,斑马线乱象治理效果显著[3]。如据西安市统计局发布结果,83.0%的受访市民认为“车让人”行动以来西安市的交通秩序有好转[4]。杭州市区道路斑马线前机动车的礼让率已超过93.91%,公交车“礼让斑马线”率达到99%[5]。斑马线事故得到有效控制,但其是否影响到了交通安全的整体态势?
本文汇总学者李生才等首次统计的2016年5月[6]至2018年6月[7](该时间区间包含但不止于“车让人”活动区间)交通事故数据见图1。由图发现,2年来交通事故总量及所占总事故比率均未发生明显变化,虽在2018年1月至4月出现了短暂下滑,但之后又开始回升。即“车让人”虽然有效控制了斑马线事故,但对总的交通事故控制并未产生明显影响。
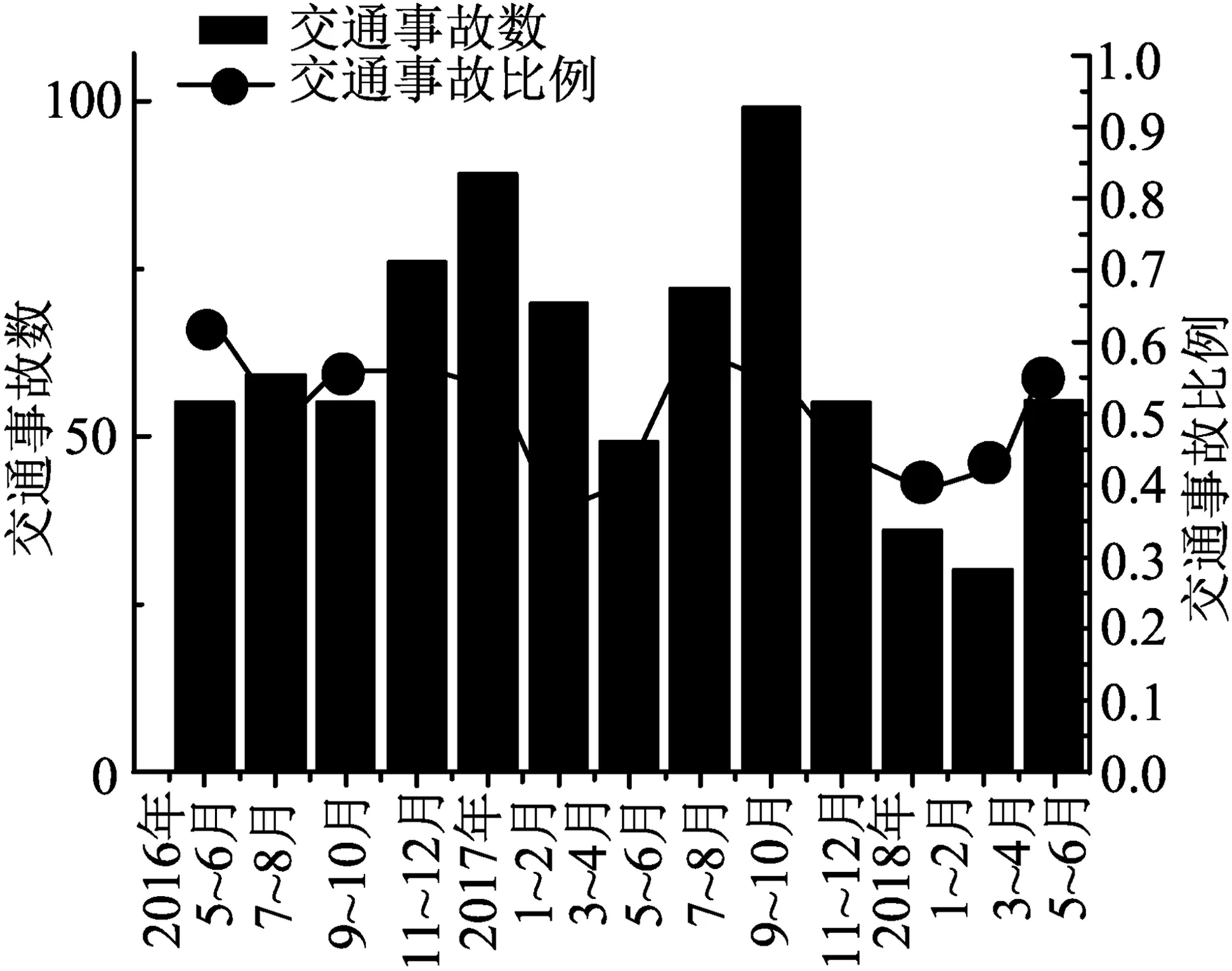
图1 2016年5月—2018年6月国内交通事故数及占比统计
是什么原因使“车让人”对整体交通安全态势失去影响?国内在此方面的研究很少,基于此,本文通过斑马线“人-车”博弈仿真,分析原因。
1 无规定“车让人”情况下的“人-车”博弈
“车让人”实际上是司机与行人经过博弈之后,做出能使双方利益最大化的选择。
博弈论作为一种决策理论,它可以模拟利益冲突的不同利益相关者间的交互[8],它通过对人们相互之间存在互动关系、策略对抗情况下的决策选择,为个人或组织的正确决策提供指导[9]。2017年,Bjornskau T[10]的研究结果首次明确表明,博弈论建模是理解道路用户交互行为的有效工具。本文在以下两种不同背景情况下,将司机和行人的选择进行博弈。两种不同背景情况如下。
(1)仅考虑司机与行人能获得的实际利益(外在利益)与心理感受(内在利益)。
(2)规定机动车必须礼让行人,否则扣分或罚款,同时考虑司机与行人能获得的实际利益(外在利益)与心理感受(内在利益)。
2012年,梅强等[11]设计调查问卷对员工生命价值进行评估,开创性地发现员工的生命价值评估值呈正态分布,而周涛等[12]提到的泊松分布被广泛用来表示人的行为活动。故而本文中行人和司机的外在利益可以用正态分布表示,内在利益可以用泊松分布表示,之后本文组织15人分别对3种典型场景情况,进行了150次实验。实验按人员伤害、财物损失、时间、心态等,规定收益值在[-10,10]之间,根据不同的情况选取。整理实验数据后,分别确定正态分布(外在利益)和泊松分布(内在利益)的分布参数。该第一种背景下的司机和行人收益分布如表1所示。
以表1中N(-2,1)+P(1)为例,表示当行人和司机都行动时,行人的收益分布。其中,N(-2,1)表示行人获得的外在利益服从一个数学期望为-2、标准差为1的正态分布,P(1)表示行人获得的内在利益服从数学期望和方差均为1的泊松分布。
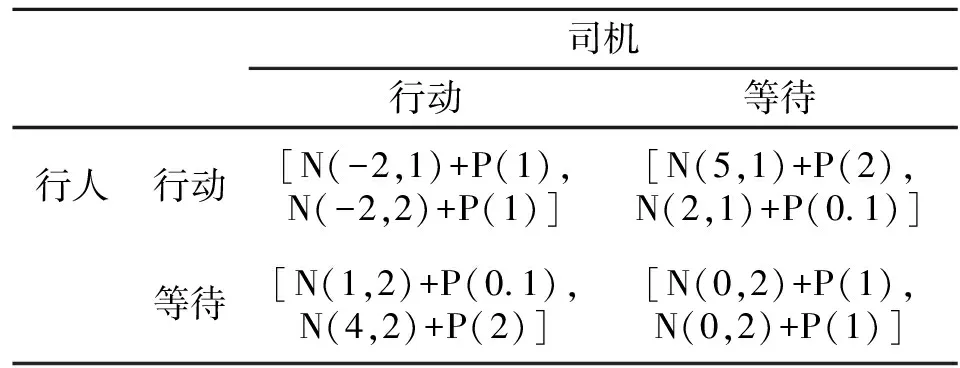
表1 无规定“车让人”情况下司机与行人的收益分布
注:N(μ,σ)表示正态分布,P(λ)表示泊松分布。
利用matlab对50对司机与行人的行为进行博弈仿真,统计仿真得到的50个纳什均衡点,并用图表示,观察纳什均衡点的分布。50对行人与司机的行为博弈产生的收益统计如图2所示,纳什均衡点分布如图3所示。

图2 无规定“车让人”情况下的最优方案中行人与司机收益统计分布

图3 无规定“车让人”情况下的最优方案分布
图3的4个方格与收益矩阵方案一一对应。方案一:行人、司机均行动,对应图3的标号①;方案二:行人行动、司机等待,对应图3的标号②;方案三:行人等待、司机行动,对应图3的标号③;方案四:行人、司机均等待,对应图3的标号④。由图可知,50次博弈产生的纳什均衡点大部分集中在方案三的框中,在没有规定“车让人”时,只有约五分之一的司机选择礼让行人。
需注意的是博弈仿真所得结果为司机的“积极礼让率”。积极礼让表示司机从内心愿意礼让行人,而真实礼让则表示受限于现实情况,司机实际的做法。从图3可以看出,司机的积极礼让率为20%。
2 规定“车让人”情况下的“人-车”博弈
2.1 “人-车”博弈
在规定机动车必须礼让行人,否则扣分或罚款,同时考虑司机与行人能获得的实际利益(外在利益)与心理感受(内在利益)的背景下,利用根据实验既已确定的正态分布和泊松分布,随机抽取司机和行人所获得的收益,具体如表2所示。
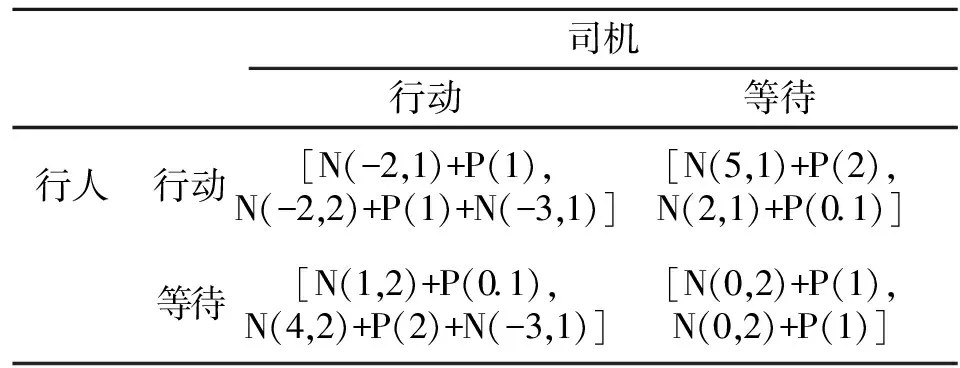
表2 规定“车让人”情况下司机与行人的收益分布
注:N(μ,σ)表示正态分布,P(λ)表示泊松分布。
以表2中N(-2,2)+P(1)+N(-3,1)为例,表示当行人、司机都行动时,司机的收益分布。其中,N(-3,1)表示由于司机没有礼让行人,得到的利益服从数学期望为-3、标准差为1的正态分布。在第二种背景下,50对行人与司机的行为博弈产生的收益统计如图4所示,纳什均衡点分布如图5所示。

图4 规定“车让人”情况下的最优方案中行人与司机收益统计分布
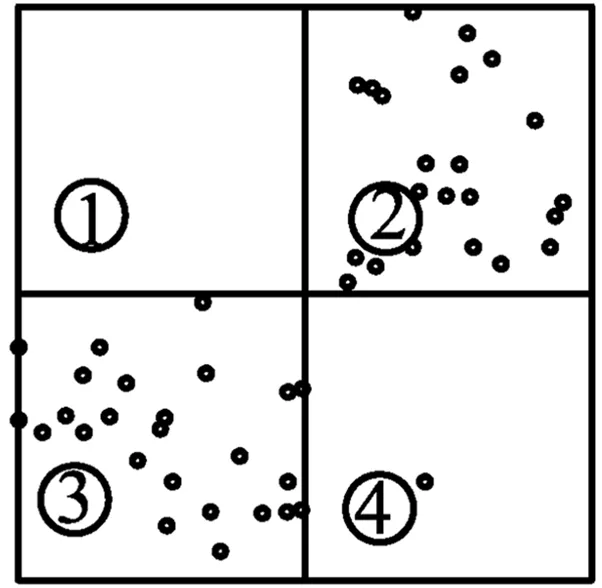
图5 规定“车让人”情况下的最优方案分布
图5的4个方格与收益矩阵方案一一对应。从图5可以看出,在规定司机必须礼让行人的情况下,博弈后有一半的司机选择礼让行人,一半的博弈结果是选择方案三:人等车行。
虽然规定了“车让人”后,博弈产生的纳什均衡点也更多地落在“车让人”的方案上,但由于一旦发生事故,行人受到的伤害更大,因此,博弈结果仍有一半选择“人等车”。另一方面,在车让人过程中,还隐藏着危险——潜藏在礼让司机的心里的危险。
经收集相关信息[2,4,13],发现礼让司机的不满主要集中在两点:其一,礼让时间太久从而变得焦躁;其二,礼让后,行人散漫的态度让司机心生不满。阿根廷学者Escanés G等[14]通过实验得出:进度阻碍、敌对姿态、侵权行为是引起路怒的主要因素。本文总结的礼让时间太久可隶属于“进度阻碍”,行人态度散漫则可隶属于“敌对姿态”。故而这两种负面情绪共同指向了近年耳熟能详的交通危险源——路怒(road rage[15])。
据统计,我国35%司机承认属于“路怒族”[16],而我国超过10%的交通事故起因都是“路怒症”[13]。例如,司机可能因礼让时间过久,驶离斑马线区域后便超速驾驶,而后与前车追尾;也可能因为“散漫行人”的影响,情绪变得糟糕,驶离斑马线后,骑线驾驶而与临车刮擦。
综上可推得:如果没有很好地兼顾司机情绪,“车让人”并不能实现本质安全。此时,事故总量并无很大变化,只是事故地点变了,从斑马线推移到了公路的其他地方(事故外溢)。
综上所述,可以得出以下要点:
(1) “车让人”是正确的,因为它瞄准的是“占全国交通事故90%的机动车未按规定让行事故”。
(2)接下来的任务重点是:在控制让行事故的同时,防止事故“外溢”到道路的其他区域。
(3)控制的重点。车拥有坚硬的钢铁外壳和人望尘莫及的速度,而行人是血肉之躯,所以司机是主动方,故而车让人过程的控制重点是司机。
2.2 司机心境分析
司机心境包含积极和消极等两种极端心情。正常驾驶过程中,司机心情处于积极与消极之间,即为平常心,如图6。在礼让行人过程中,随着礼让时间不断增长,或者当看到散漫的行人,司机心情由积极过度为消极,如图7,情况越恶劣,心情便会沿图7中的a线迅速地转变为消极,最终造成路怒。路怒是应避免的,因为路怒会造成事故的“外溢”。
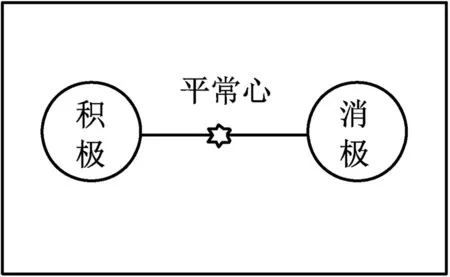
图6 司机平常心状态下的心境
3 加入正向反馈下的“人-车”博弈
3.1 构建“人-车”正向反馈回路
据以上调研可知:“礼让时间过长”和“散漫的行人”都是客观存在的,故而a线无法删除。为缓和司机心境,便只剩一种方法:即从消极心情再引出一条b线返回积极心情,从而构成图8的反馈回路。图8表示:不否认积极向消极的变化(a线),即承认礼让时间增长和个别散漫行人对司机的消极影响,但也可以在司机心中架起一道桥(b线),让消极变为积极。在a线与b线的交互下,司机整体的心境被中和,路怒也被消除。

图7 司机礼让状态下的心境

图8 出现反馈回路的司机心境
法国学者Guéguen N等[17]在他的文章《论行人微笑和司机行为的关系》中总结:行人一笑,驾车者就放慢了车速。故而本文认为b线应主要由行人来搭建。b线的正确搭建方式,即:只要行人给司机一个正向的鼓励(微笑、点赞)。
3.2 正向反馈后的“人-车”博弈
此时,“人-车”博弈的背景变为:规定机动车必须礼让行人,否则扣分或罚款,并且,当司机礼让行人时,行人要对司机回以感谢,同时考虑司机与行人能获得的实际利益(外在利益)与心理感受(内在利益)。在这个背景下,利用根据实验既已确定的正态分布,随机抽取司机和行人所获得的收益,具体如表3所示。
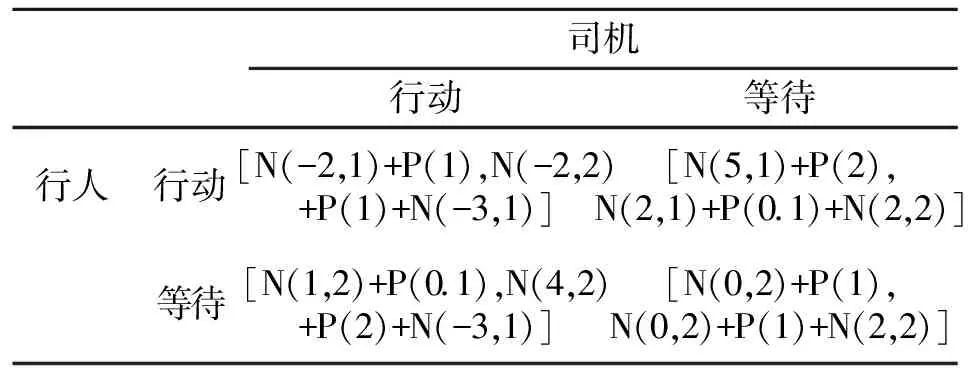
表3 正向反馈后的司机与行人的收益分布
注:N(μ,σ)表示正态分布,P(λ)表示泊松分布。
以表3中N(2,1)+P(0.1)+N(2,2)为例,表示当行人行动、司机等待时,司机的收益分布。其中,N(2,2)表示司机礼让行人,得到的收益服从数学期望为2、标准差为2的正态分布。在这个背景下,50对行人与司机的行为博弈产生的收益统计如图9所示,纳什均衡点分布如图10所示。
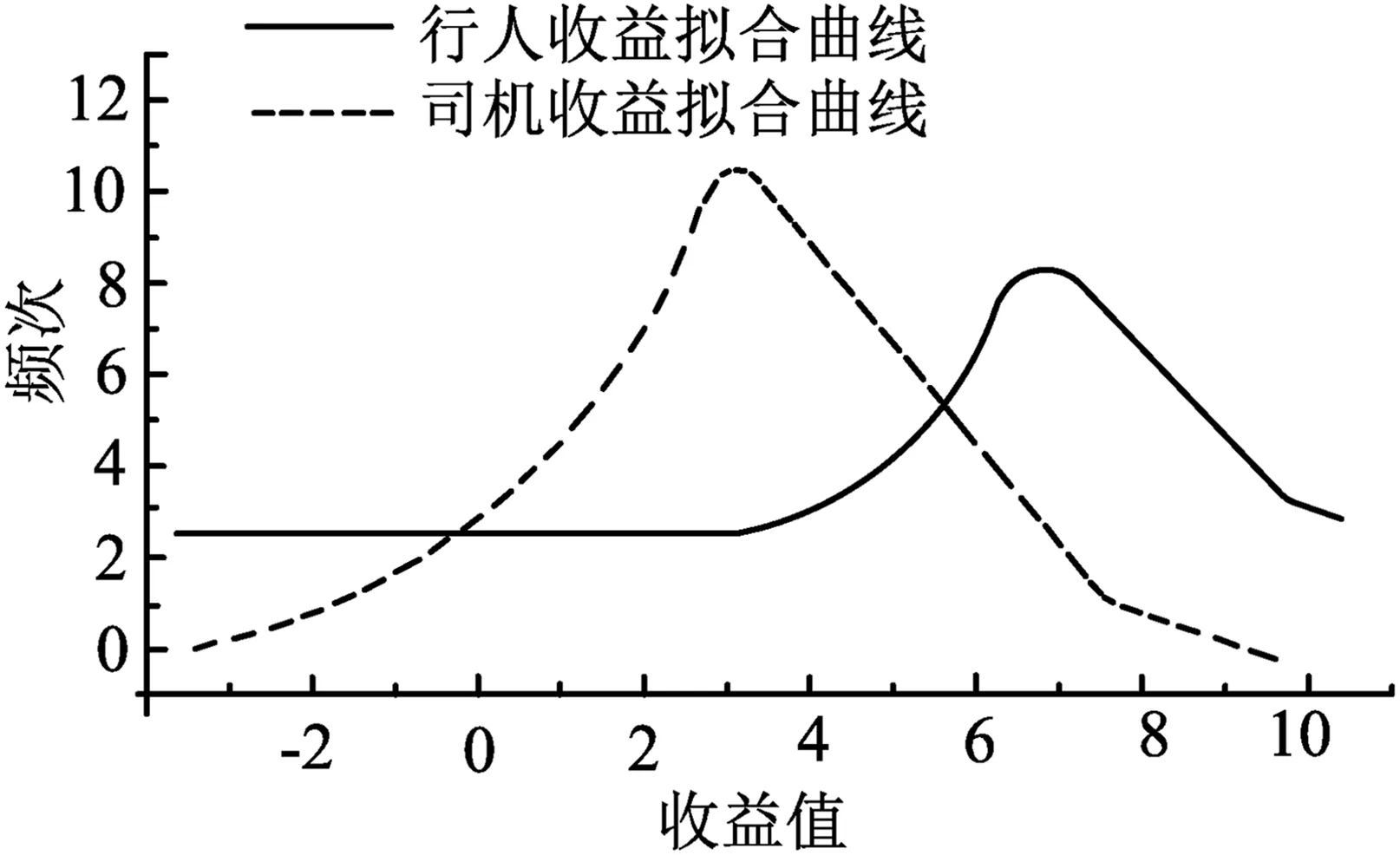
图9 加入正向反馈下的最优方案中行人与司机收益统计分布
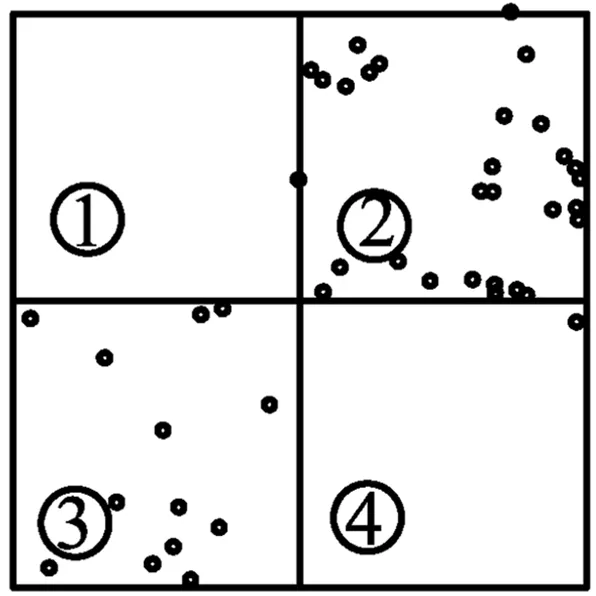
图10 加入正向反馈下的最优方案分布
图10的4个方格与收益矩阵方案一一对应。从图10可以看出,在规定司机必须礼让行人,并且行人对司机的礼让行为表示感谢的情况下,博弈后有70%左右的纳什均衡点落在方案二的框图中,表示有约70%的司机选择礼让行人。可以看出,在司机收到正向反馈后,选择“车让人”的司机数增加。
4 改善措施
基于以上分析,本文建议在斑马线位置设立司机和行人阅读的两套标语,综合防控“斑马线事故外溢”。即:分别用司机阅读的标语减弱a线影响,而用行人阅读的标语强壮b线影响。双管齐下,综合调控司机心境。张海英[18]探讨了鞠躬致谢的弊端,故而本文也不建议使用较为耗时的正向动作,应多推荐微笑、点赞等简易动作。本文给出了两套方案如表4。
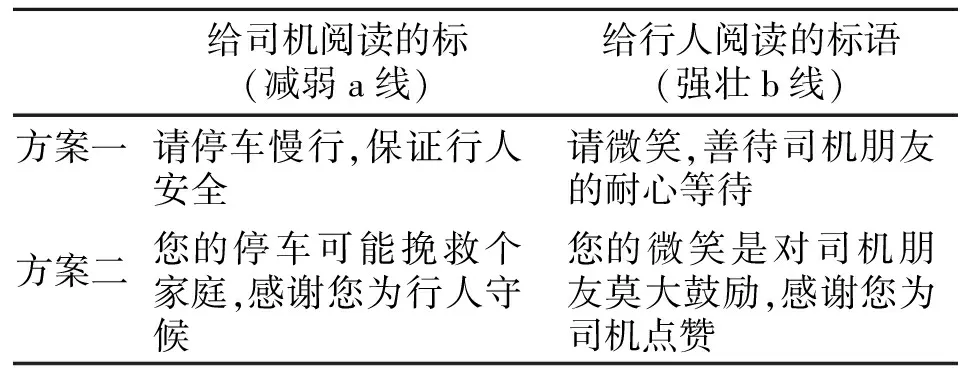
表4 司机与行人阅读的两套标语方案
通过分析,发现方案一更官方化,它以交管部门的语气来传达讯息,此时司机和行人都是处于被动位来接受信息;而方案二,交管部门则置身善意提醒者的位置,此时司机和行人处于主动位,可以充分以局中人的身份来减弱a线或者强壮b线,从而使得信息更好地被接收。通过调研,方案二的讯息接受效率也会更高。综上,本文建议在斑马线位置推广第二套方案。
5 结论
(1)现阶段“车让人”可有效控制斑马线事故,但对交通安全整体态势影响较小。通过博弈仿真,结果发现在没有规定“车让人”时,司机的积极礼让率为20%。
(2)“车让人”事故外溢。虽然通过博弈仿真发现,规定车让人能提高礼让率,司机的积极礼让率约50%,但是如果没有很好地兼顾司机情绪,“车让人”并不能实现本质安全。即此时,事故总量并无很大变化,只是事故地点变了,从斑马线推移到了公路的其他地方。
(3)司机心境分析与控制。文章将司机心境分为积极和消极两种心态,“礼让时间过长”和“个别散漫行人”会使司机心境由平和转向消极,但可以在司机心中构建“消极→积极”关系,以中和司机整体的心境。“消极→积极”关系应由行人主导构建。通过博弈仿真发现,司机收到正向反馈时,司机的积极礼让率约70%。另一方面,为保证路口的通过速度及人身安全,本文不建议使用耗时的正向动作,推荐微笑、点赞等简易动作。
(4)改善措施。文章建议在斑马线处分别设计给司机和行人阅读的两套标语,司机阅读的标语可减弱“积极→消极”影响,行人阅读的标语可强壮“消极→积极”影响,双管齐下,综合调控司机心境,防止“斑马线事故外溢”。
猜你喜欢
品牌研究(2022年34期)2022-12-15
品牌研究(2022年36期)2022-01-01
吉首大学学报(自然科学版)(2021年3期)2021-12-16
作文周刊·小学二年级版(2020年24期)2020-07-14
学生天地(2020年29期)2020-06-09
中国管理信息化(2019年18期)2019-10-15
统计科学与实践(2019年1期)2019-03-28
物流科技(2017年9期)2017-10-31
环球市场信息导报(2016年41期)2017-01-19
新课程(下)(2016年5期)2016-08-15