
LS+AR单差模型预报极移参数方法研究
2020-04-02 02:53郭忠臣李致春
宿州学院学报 2020年12期
郭忠臣,孙 朋,李致春
宿州学院环境与测绘工程学院,安徽宿州,234000
极移在卫星导航、大地测量等领域具有重要作用,但当前观测技术并不能实时获得高精度极移观测量[1]。为了实时得到高精度极移观测量,越来越多的方法被应用到极移预报中,当前主要有最小二乘外推法(Least squares extrapolation model)、神经网络模型(Neural networks)、卡尔曼滤波(Kalman filter)和最小二乘联合自回归模型(Least squares extrapolation of the harmonic model and autoregressive prediction,LS+AR模型)等[2-6]。地球自转参数预测方案比较大会战(EOP PCC)活动证实没有任何一种方法适合所有跨度的极移预报,但LS+AR模型在极移短期预报方面精度较优[7]。
LS+AR模型在进行极移预报时,首先通过对极移序列构建LS模型,然后对LS拟合的残差项构建AR模型,LS模型与AR模型的预报值之和即为最终预报值。但LS+AR模型在预报时,并没有完全顾及模型与极移序列的适应性,在一定程度上影响了预报结果的精度[8]。本文从增强数据的平稳性以及与模型的适应性方面考虑,对传统LS+AR模型预报极移的方式进行改进,实验结果表明,改进后的模型预报精度较LS+AR模型具有一定提高。
1 LS+AR模型
1.1 LS模型
极移主要受趋势项和周期项影响,其中周期项主要有Chandler项、周年项和半周年项,由参考文献[9-11]可知,极移序列的LS模型可构造成:
(1)
其中,ai为趋势项拟合系数,bi、ci、di为周期项的振幅,P1、P2、P3分别为Chandler项、周年项和半周年项的周期,t为时间。
将式(1)化简成:L=BX,即可通过最小二乘原理计算参数X。

1.2 AR模型
AR模型主要针对平稳时间序列构建模型,模型适应度越高,则建模预报效果相对越好。AR模型基本形式可表示为[9]:
zt=φ1zt-1+φ2zt-2+…+φpzt-p+εt
(2)
其中,z为原始序列,φi为AR模型系数,εt为t时刻的白噪声,P为模型阶数。
使用AR模型建模时,需要合理的确定模型阶数P。当前主要有AIC准则和BIC准则等用于AR模型定阶,本文使用AIC准则确定模型阶数,当AIC(P)取最小值时,P即为最佳阶数[12]。AIC准则表示为:
(3)

2 LS+AR单差预报模型数据处理流程
本文从增强数据的平稳性以及与模型的适应性方面考虑,对传统LS+AR模型预报极移方法进行改进,改进的模型记为LS+AR单差模型。该模型的预报模式为:①对原始序列构建LS模型,得到序列的拟合参数、拟合值及残差序列,残差序列记为LS_bias,LS外推结果记为LS_pre;②对残差序列LS_bias作一阶差分处理得到LS_bias_diff;③对差分后序列构建AR模型,AR模型的预报结果记为LS_diff_AR_pre;④对LS_diff_AR_pre作逆差分,即可得到预报的残差序列LS_AR_pre,LS_pre与LS_AR_pre之和即为最终的预报值PM_pre。具体预报流程图见图1。
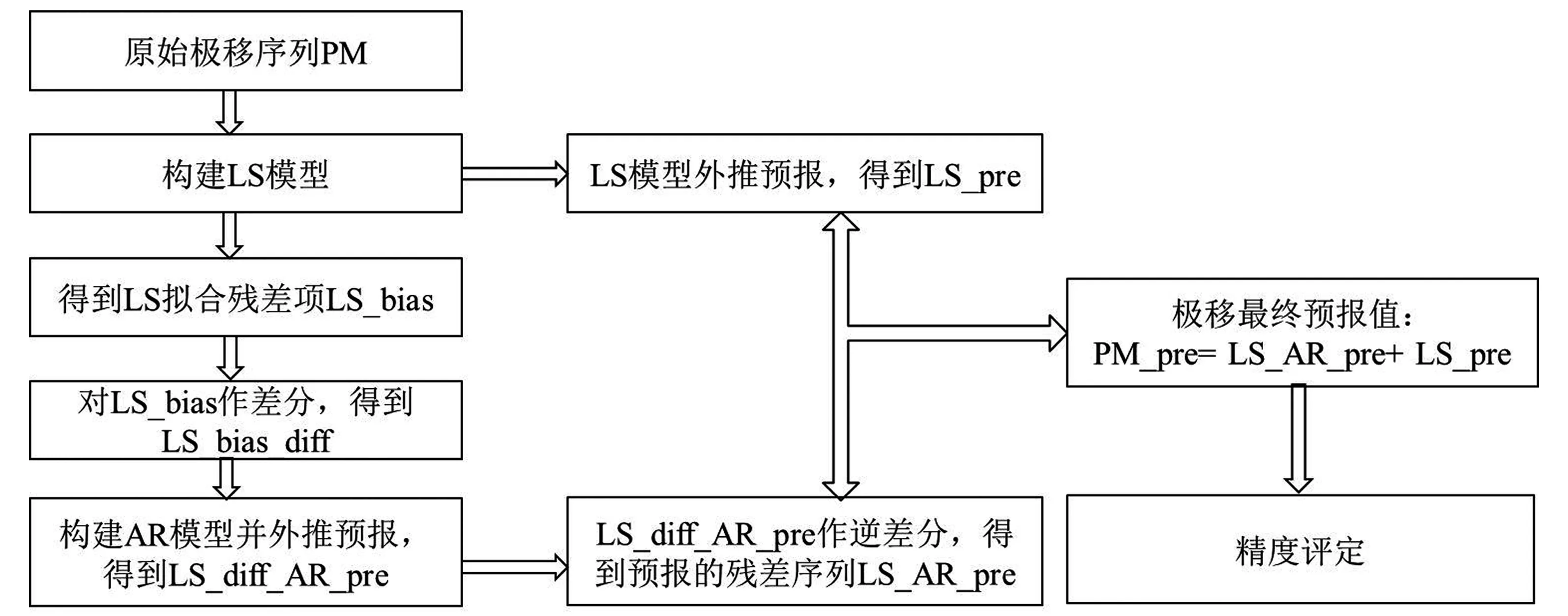
图1 LS+AR单差模型预报极移流程图
3 实验分析
实验所用数据来源于IERS公布的EOP C04序列(http://hpiers.obspm.fr/eoppc/eop//eopc04/eopc04.62-now),数据采样间隔为1天,取2009/07/01至2020/01/01(儒略日:55013至58849)期间的数据进行实验。顾及序列内部数据之间的相关性,选取10年长度的极移序列作为基础序列,其余数据用于精度评定。
为对比单差模型的预报精度,构造如下两种实验方案:
方案一:使用LS+AR模型进行预报;
方案二:使用LS+AR单差模型进行预报。
3.1 方法可行性分析
图2给出了LS模型对实验数据的拟合结果,图3给出了LS模型拟合后的极移X方向(PMX)和极移Y方向(PMY)的残差及差分后的结果,可以看出,LS模型拟合的残差波动较大,X方向和Y方向残差分别在-0.07~0.06 as和-0.07~0.08 as之间,差分后X方向和Y方向残差分别在±0.002 5 as和±0.002 as之间,差分后残差序列波动更加趋于平稳。图4和图5分别给出了PMX和PMY残差序列及其差分后的频数分布直方图,通过假设检验可知,差分后的残差序列均符合正态分布与AR模型的契合度更高[13]。
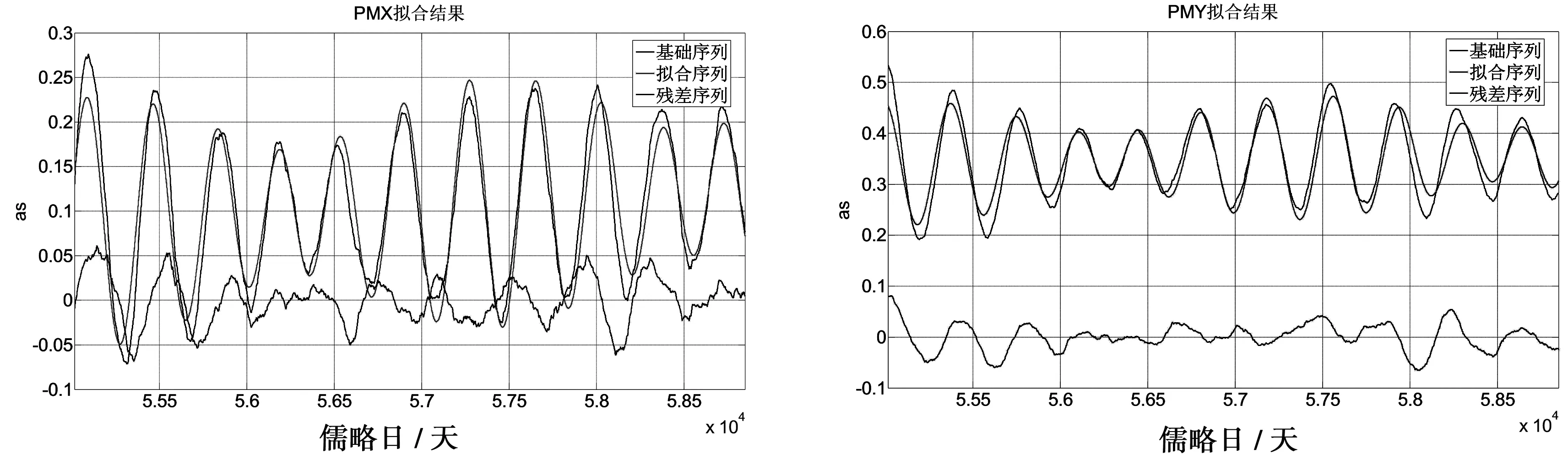
图2 LS模型极移拟合结果
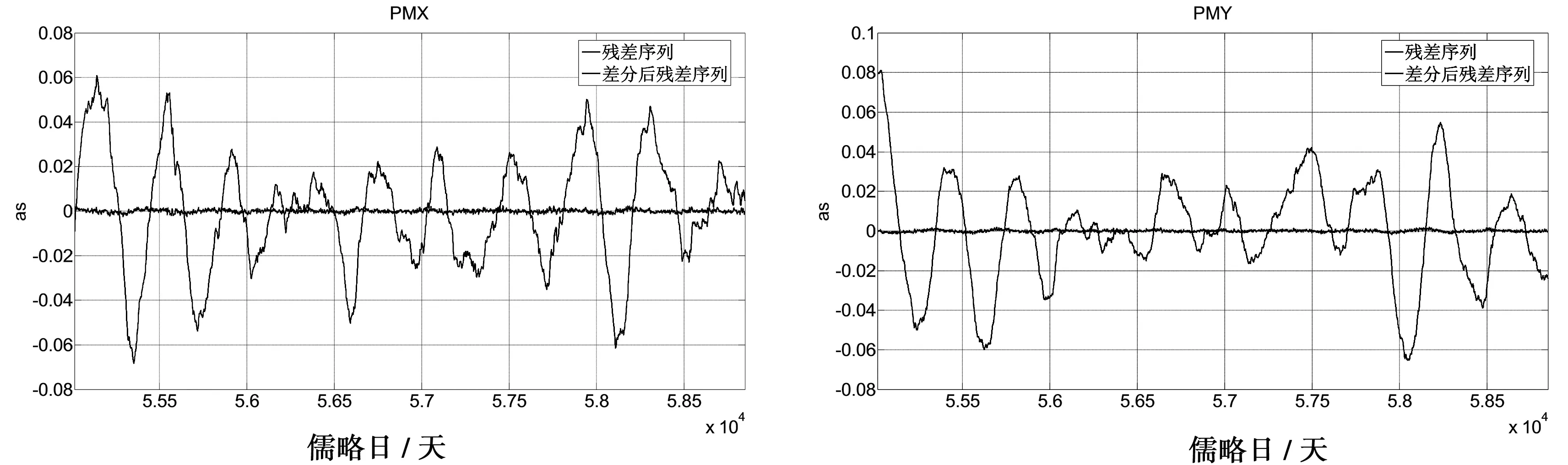
图3 极移残差序列及差分后残差序列
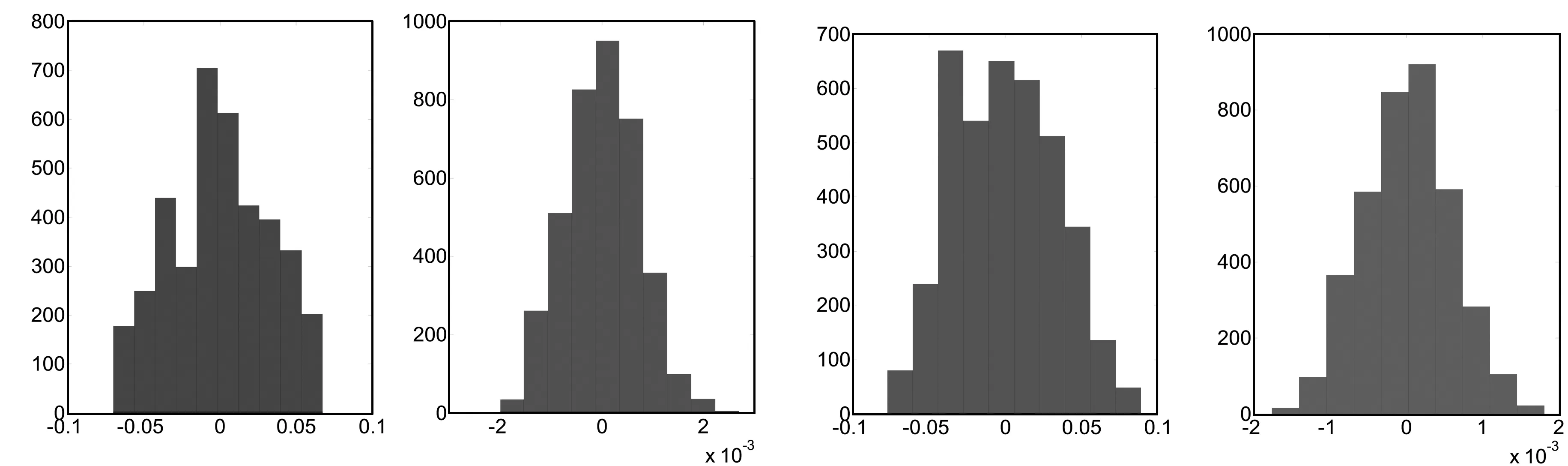
图4 PMX残差序列及其差分后的频数分布直方图 图5 PMY残差序列及其差分后的频数分布直方图
3.2 实验结果分析
分别对PMX和PMY进行1~30天的预报,不同跨度各预报60期,使用平均绝对误差(MAE)进行精度评价,MAE计算公式为[9,11]:
(4)
其中:i为预报跨度,j=1,2,…,n为预报期数,P为极移预报值,O为极移观测值。
图6和图7分别给出了两种方案PMX和PMY预报10天和30天的精度统计,图8给出了EOP PCC活动的预报结果。
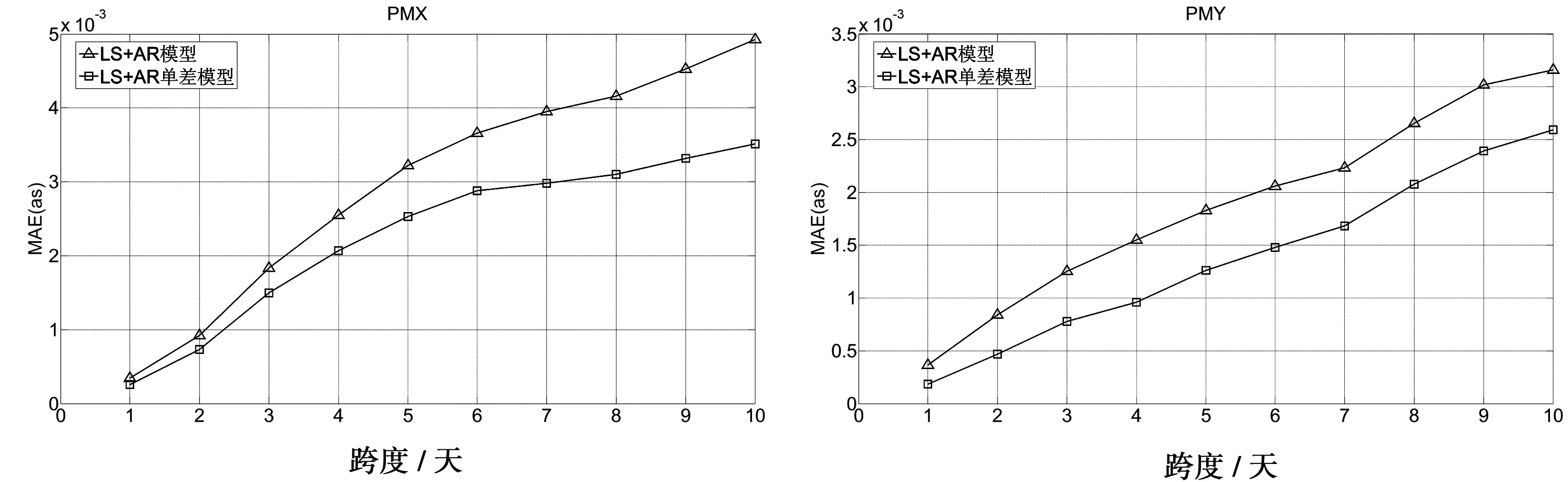
图6 两种方案预报10天精度对比
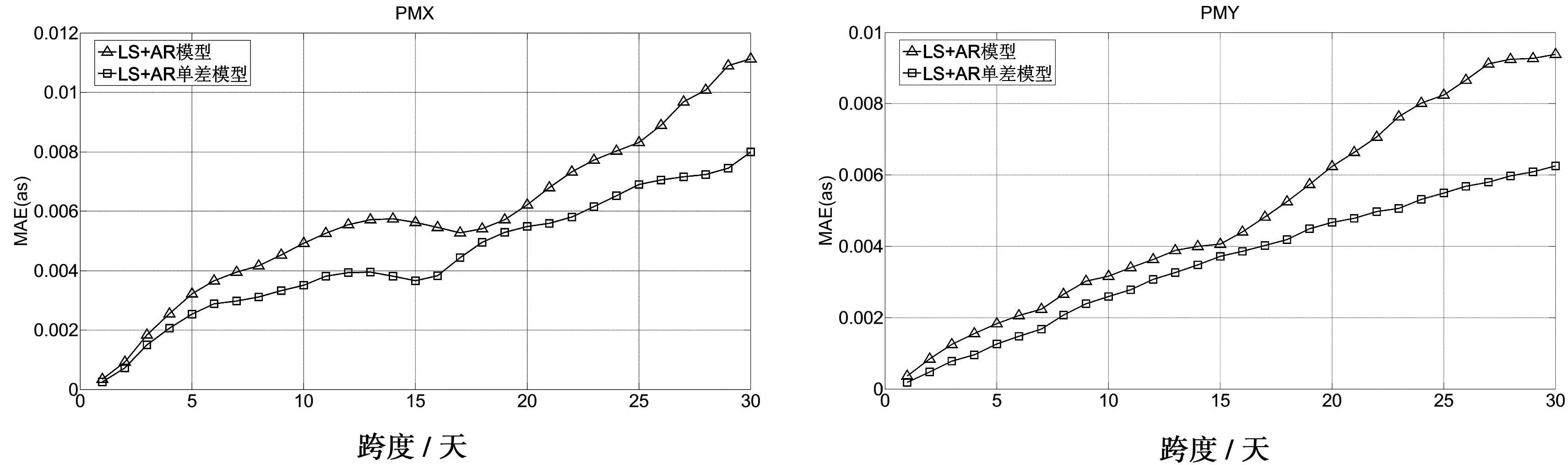
图7 两种方案预报30天精度对比
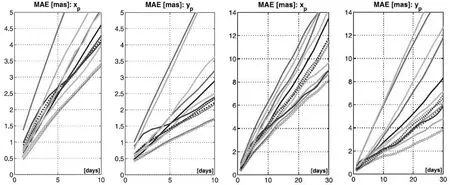
图8 EOP PCC活动预报结果
通过分析可知:
(1)在预报跨度为1天时,方案一和方案二预报的PMX和PMY的MAE分别为0.348 mas、0.254 mas和0.364 mas、0.184 mas,对于PMY预报1天的精度来说,方案二较方案一提高了97.5%,精度提高较为明显,另外EOP PCC活动预报1天的极移基本上都在0.4~1.0 mas之间,本文所用两种方案的预报精度均优于EOP PCC活动的预报结果,这也与本文所用数据的精度较高有关;
(2)随着预报跨度的增加,PMX和PMY的预报误差基本上都在逐渐增加,预报跨度为10天时,对于PMX而言,方案一和方案二的预报误差分别为4.924 mas和3.512 mas,EOP PCC活动中大多方法的预报误差在3.4~5.0 mas,方案一的预报精度与EOP PCC活动相当,但方案二的预报精度基本上高于EOP PCC活动中的所有方法;对于PMY,方案一和方案二的预报误差分别为3.162 mas和2.595 mas,EOP PCC活动中大多方法的预报误差在1.6~3.5 mas,两种方案与EOP PCC活动中的预报精度相当;
(3)在预报跨度为10~20天时,PMY的预报误差逐渐增大,PMX的预报误差出现了波动,即部分跨度的预报误差较前一跨度有所降低,对于PMX在不同跨度预报精度变化规律不一致的情况,考虑是与预报过程中AR模型阶数的选取及数据的循环迭代使用有关,后续将会进一步设计实验进行分析;
(4)预报跨度在20~30天时,方案一的预报误差增速较快,方案二预报误差增速平稳,方案二预报的PMY较方案一相比,部分跨度预报精度可提高50%以上,预报精度与EOP PCC活动中大多数方法相当,对于PMX,方案二的预报精度较方案一可提高20%~40%,但方案二的预报精度基本上优于EOP PCC活动中的所有方法。
4 结 论
本文从数据与模型的适应度考虑,对传统LS+AR模型预报极移的方式进行了改进,并将改进后的极移预报精度与传统LS+AR模型和EOP PCC活动进行对比。通过对比可知,改进后模型的预报精度具有一定程度的提高,说明改进后的预报方式具有一定的研究意义。从总体趋势来看,随着预报跨度的增加,精度提高越明显,并且PMY的预报精度提高优于PMX,另外在预报1天时,PMY的预报精度提高了97.5%,且优于EOP PCC活动中的所有方法,预报跨度为20~30天时,PMY的预报精度可提高30%~50%,PMX在预报跨度为20~30天时,预报精度基本上优于EOP PCC活动中的所有方法。
猜你喜欢
数学杂志(2022年5期)2022-12-02
建材发展导向(2022年14期)2022-08-19
网络安全与数据管理(2022年3期)2022-05-23
新世纪智能(数学备考)(2021年5期)2021-07-28
建材发展导向(2021年6期)2021-06-09
西部交通科技(2021年9期)2021-01-11
北京航空航天大学学报(2020年10期)2020-11-14
自动化学报(2019年6期)2019-07-23
铁道科学与工程学报(2015年4期)2015-12-24
中国惯性技术学报(2015年1期)2015-12-19
